Roboty zdobywają nagrody dzięki naszym czujnikom
„Produkty SBG Systems są najwyższej klasy, zapewniając całą dokładność i precyzję, której potrzebujemy. Co ważne, dokumentacja i wsparcie są na najwyższym poziomie, co jest szczególnie korzystne dla studentów takich jak my. Chciałbym pozdrowić pana Jérémy Colombela i pana Nicolasa Michela tutaj, w Singapurze, którzy byli dla nas szczególnie pomocni.” | Isabella Lu, Inżynier Elektryk, Zespół Bumblebee

Zespół Bumblebee łączy innowacyjnych studentów z CDE, SoC i NUS Business School na National University of Singapore. Ponadto, mają wizję tworzenia autonomicznych systemów przyszłości. Zespół projektuje i buduje pojazdy morskie, które nawigują pod wodą i na powierzchni. Co więcej, koncentrują się na rozwoju autonomii w trudnych środowiskach morskich.
Studenci z wydziałów Mechanicznego, Elektrycznego, Inżynierii Komputerowej, Informatyki i Biznesu wnoszą różnorodną wiedzę do zespołu.

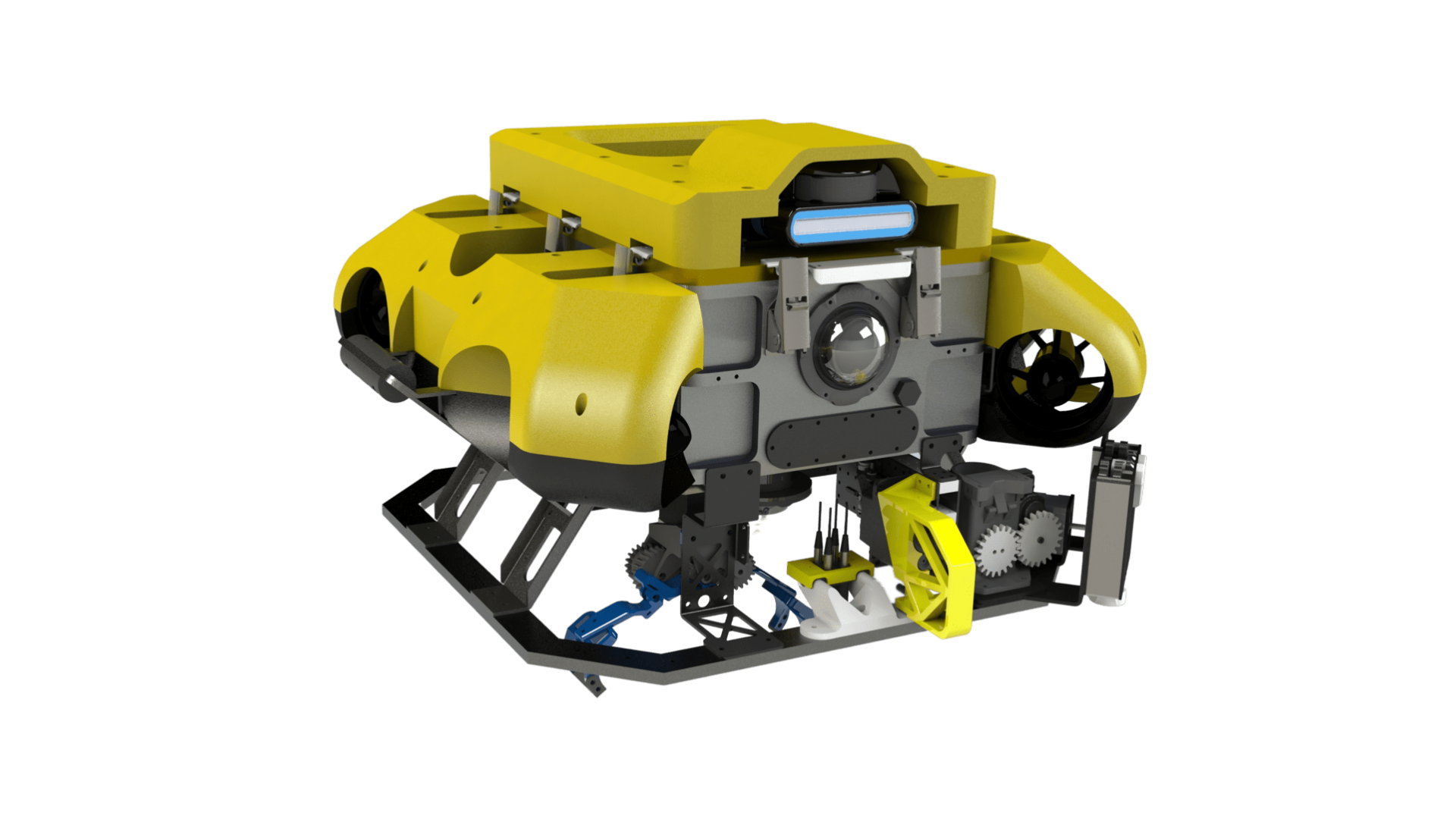
Obecny system Team Bumblebee składa się z trzech pojazdów autonomicznych: BBAUV4.1 (Autonomiczny Pojazd Podwodny), ASV 3.0 (Autonomiczna Jednostka Nawodna) oraz Jellyfish (Bezzałogowy Statek Powietrzny).
Pojazdy te osiągnęły niezwykłe sukcesy w międzynarodowych konkursach, takich jak RoboSub Challenge i RobotX.
Potrzeba dokładnego i niezawodnego INS
Zespół Bumblebee potrzebował precyzyjnego, niezawodnego IMU o niskim opóźnieniu z modułem GPS, aby osiągnąć dokładną lokalizację i nawigację w środowisku morskim. Ich kluczowe wymagania obejmowały:
- Dokładność Roll & Pitch poniżej 1 stopnia.
- Kompatybilność z Ubuntu, najlepiej ze sterownikiem ROS lub łatwo dostępnym sterownikiem стороннего производителя.
- Odpowiednie wbudowane ekranowanie magnetyczne, aby zapobiec zakłóceniom.
- Wytrzymałe i standardowe złącza.
- Obsługa pozycjonowania RTK (Real-Time Kinematic).
Czujniki te miały być zamontowane na zmodyfikowanej platformie WAM-V używanej do autonomicznych misji w środowisku morskim, umożliwiając nawigację, unikanie przeszkód, wykrywanie obiektów i planowanie misji.
Dlaczego zespół Bumblebee wybrał SBG Systems?
Zespół Bumblebee przeprowadził dokładną ocenę różnych dostawców IMU. Ostatecznie zdecydowali się na współpracę z SBG Systems ze względu na kilka kluczowych czynników:
1 – Obudowa odporna na warunki atmosferyczne: Czujniki SBG Systems są wyposażone w obudowy o stopniu ochrony IP-68, dzięki czemu nadają się do zastosowań morskich.
2 – Wiarygodność producenta: Reputacja SBG Systems w dziedzinie czujników inercyjnych i systemów nawigacyjnych odegrała znaczącą rolę w ich decyzji.
3 – Postęp techniczny: Czujnik Ellipse-D firmy SBG Systems oferował zaawansowane funkcje, w tym dwuantenowy GPS i ulepszone dane headingu, zmniejszając potrzebę kalibracji magnetometru.
4 – Wsparcie ekspertów: Zespół Bumblebee otrzymał cenne porady techniczne od ekspertów, którzy byli zawsze dostępni, aby pomóc.
Dokładna orientacja i silne wsparcie
Po zintegrowaniu Ellipse-D firmy SBG Systems ze swoimi systemami, zespół Bumblebee doświadczył znacznych ulepszeń:
- GNSS z dwiema antenami: Dodanie GNSS z dwiema antenami wyeliminowało wpływ zakłóceń magnetycznych, zapewniając dokładne dane dotyczące orientacji i absolutne odczyty odchylenia, co jest kluczowe dla nawigacji na powierzchni zbiorników wodnych.
- Kalibracja żyroskopu: Zespół otrzymał wsparcie od inżynierów SBG Systems w celu rozwiązania problemów z odchyleniem żyroskopu i zapewnienia stabilnej wydajności.
Idealne dopasowanie
Ellipse-D idealnie pasował do ograniczeń aplikacji ASV zespołu Bumblebee, zapewniając wymaganą dokładność, niezawodność i łatwość integracji.
Zespół Bumblebee docenił kilka korzyści z używania produktów SBG Systems:
✦ Szybkie wsparcie: Zespół wsparcia zapewnił szybką pomoc w razie potrzeby.
✦ Szczegółowa dokumentacja: Dostępne były obszerne arkusze danych i przewodniki po aplikacjach, pomagające w integracji i rozwiązywaniu problemów.
✦ Łatwość integracji: Czujniki SBG Systems zostały zaprojektowane z otworami montażowymi i funkcją USB plug-and-play, co upraszcza integrację.
✦ Obniżone ceny: Opłacalna cena była korzystna dla projektu prowadzonego przez studentów.
✦ Wodoodporna i trwała obudowa: Odporne na warunki atmosferyczne obudowy czujników SBG Systems przyczyniły się do ich trwałości w środowisku morskim.
Trzy rzeczy, które zespół Bumblebee ceni w nas najbardziej
1 – Szczerość i zaangażowanie: SBG Systems wykazało niezwykłe zaangażowanie we wspieranie zespołu Bumblebee wykraczające poza typowe relacje dostawca-klient, dokładając wszelkich starań, aby pomóc zespołowi w osiągnięciu sukcesu.
2 – Pasja i poświęcenie inżynierów: Pasja i wiedza inżynierów wsparcia SBG Systems współgrały z zamiłowaniem zespołu Bumblebee do robotyki i technologii.
3 – Obszerna dokumentacja i wsparcie: Obszerna dokumentacja i wsparcie, wraz z pomocą ze strony zespołu sprzedaży, usprawniły proces integracji dla zespołu studenckiego.
Zespół Bumblebee niedawno wziął udział w Maritime Robosub Challenge 2023, który odbył się w US Naval Transdec facility w San Diego, Kalifornia, z udziałem 35 zespołów z 5 krajów. Zostali Mistrzami, wraz z innymi wymienionymi poniżej osiągnięciami.
Nagrody RoboSub 2023:
- I miejsce w Autonomy Challenge
- I miejsce w System Assessment
- Pierwsze miejsce za stronę internetową
- Drugie miejsce za dokumentację projektową
SBG Systems składa zespołowi Bumblebee najlepsze życzenia w związku z przyszłymi przedsięwzięciami.
Ellipse-D
Ellipse-D to inercjalny system nawigacyjny integrujący podwójną antenę i dwuczęstotliwościowy RTK GNSS, który jest kompatybilny z naszym oprogramowaniem do post-processingu Qinertia.
Zaprojektowana z myślą o robotyce i zastosowaniach geodezyjnych, może łączyć dane z licznika impulsów (Pulse) lub CAN OBDII w celu zwiększenia dokładności nawigacji inercyjnej.

Zapytaj o wycenę Ellipse-D
Masz pytania?
Witamy w naszej sekcji FAQ! Znajdziesz tutaj odpowiedzi na najczęściej zadawane pytania dotyczące prezentowanych przez nas aplikacji. Jeśli nie znajdziesz tego, czego szukasz, skontaktuj się z nami bezpośrednio!
Czym jest inercyjny system nawigacyjny USV?
Inercyjny system nawigacyjny dla bezzałogowego pojazdu nawodnego (USV) ma kluczowe znaczenie dla precyzyjnej nawigacji i sterowania, szczególnie gdy GNSS jest niedostępny. Czujniki inercyjne śledzą ruch i orientację, umożliwiając skuteczną nawigację w trudnych warunkach.
Inercyjne systemy nawigacyjne (INS) integrują dane z IMU z innymi systemami, takimi jak GNSS lub Doppler Velocity Logs, w celu zwiększenia dokładności. Wykorzystują również algorytmy nawigacyjne, takie jak filtr Kalmana, do obliczania pozycji i prędkości.
Czujniki inercyjne wspierają autonomiczną pracę, dostarczając dokładne dane o kursie i pozycji dla różnych zastosowań. Zapewniają skuteczne działanie w warunkach braku sygnału GNSS i umożliwiają regulacje w czasie rzeczywistym dla zwiększenia zwrotności.
Jaka jest różnica między IMU a INS?
Różnica między inercyjnym zespołem pomiarowym (IMU) a inercyjnym systemem nawigacyjnym (INS) polega na ich funkcjonalności i złożoności.
IMU inercyjny moduł pomiarowy) dostarcza surowe dane dotyczące przyspieszenia liniowego i prędkości kątowej pojazdu, mierzone za pomocą akcelerometrów i żyroskopów. Dostarcza informacji o przechyłach, pochyleniach, odchyleniach i ruchu, ale nie oblicza danych dotyczących pozycji ani nawigacji. IMU specjalnie zaprojektowana przekazywania niezbędnych danych o ruchu i orientacji do zewnętrznego przetwarzania w celu określenia pozycji lub prędkości.
Z drugiej strony, INS inercyjny system nawigacyjny) łączy IMU z zaawansowanymi algorytmami w celu obliczenia pozycji, prędkości i orientacji pojazdu w czasie. Wykorzystuje algorytmy nawigacyjne, takie jak filtrowanie Kalmana, do fuzji i integracji danych z czujników. INS dane nawigacyjne w czasie rzeczywistym, w tym pozycję, prędkość i orientację, bez konieczności polegania na zewnętrznych systemach pozycjonowania, takich jak GNSS.
Ten system nawigacyjny jest zazwyczaj wykorzystywany w zastosowaniach wymagających kompleksowych rozwiązań nawigacyjnych, szczególnie w środowiskach GNSS, takich jak wojskowe bezzałogowe statki powietrzne (UAV), statki i okręty podwodne.
