机器人通过我们的传感器赢得奖项
“SBG Systems 的产品是顶级的,提供了我们需要的所有精度和准确性。 重要的是,文档和支持都是顶级的,这对像我们这样的学生尤其有益。 在此向新加坡的 Jérémy Colombel 先生和 Nicolas Michel 先生致敬,他们对我们帮助尤多。” | Isabella Lu,电气工程师,Bumblebee 团队

Bumblebee 团队汇集了新加坡国立大学 CDE、SoC 和 NUS 商学院的创新学生。此外,他们设想创造未来的自主系统。事实上,该团队设计和建造在水下和水面导航的海洋车辆。此外,他们的重点在于推进具有挑战性的海洋环境中的自主性。
最后,机械、电气、计算机工程、计算机科学和商业专业的学生为团队贡献了不同的专业知识。

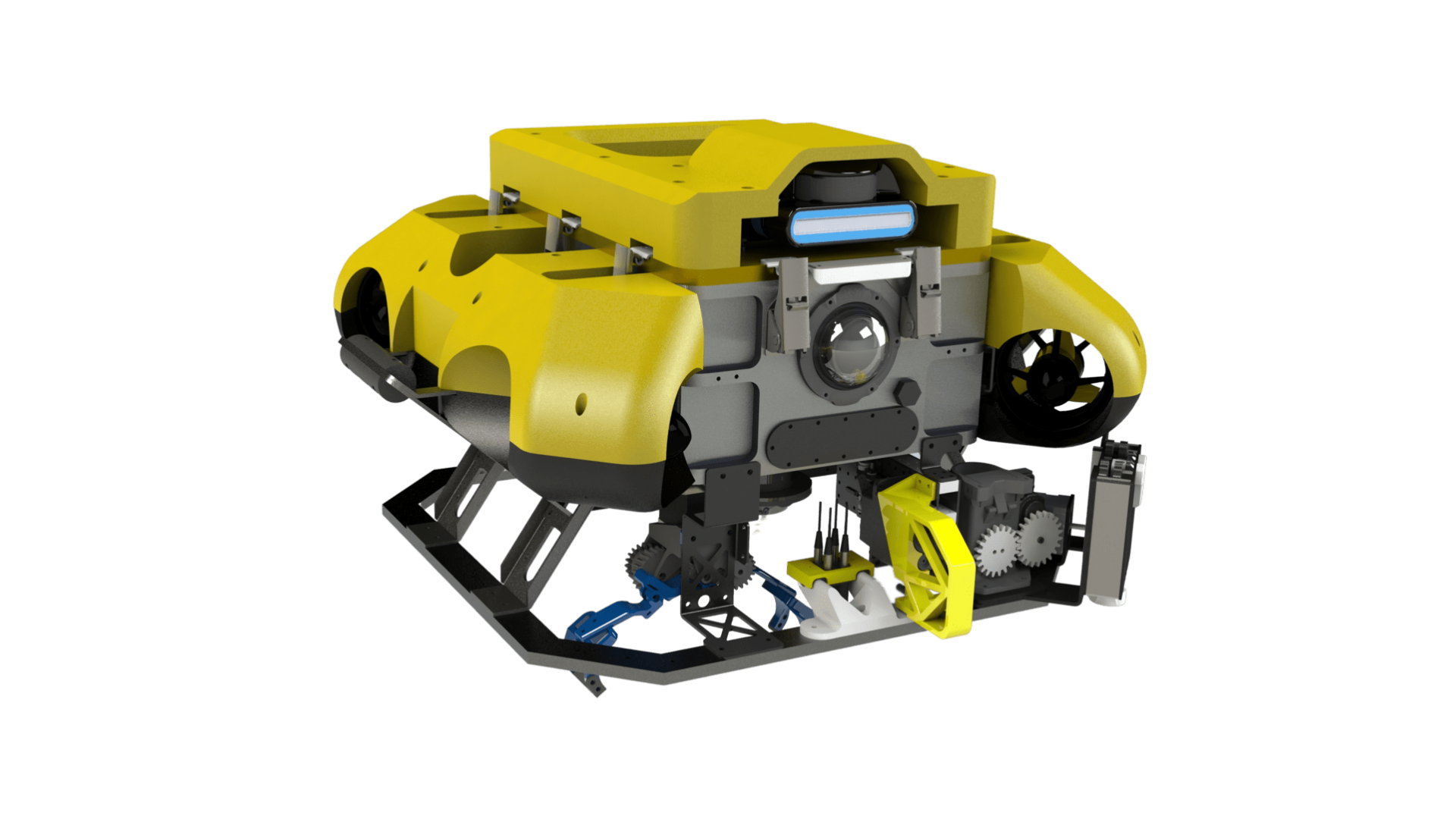
Team Bumblebee 目前的系统包括三个具备自主能力的载具:BBAUV4.1(自主水下航行器)、ASV 3.0(自主水面舰艇)和 Jellyfish(无人机)。
这些载具在 RoboSub Challenge 和 RobotX 等国际比赛中取得了显著的成功。
对精确和强大的 INS 的需求
Team Bumblebee 需要一款高精度、坚固耐用、低延迟的 IMU,并配备 GPS 单元,以在海洋环境中实现精确定位和导航。他们的主要需求包括:
- 横滚和俯仰精度小于 1 度。
- 与 Ubuntu 的兼容性,最好是使用 ROS 驱动程序或现成的第三方驱动程序。
- 足够的内置磁屏蔽以防止干扰。
- 坚固耐用的标准连接器。
- 支持 RTK(实时动态)定位。
这些传感器将安装在经过改装的 WAM-V 平台上,该平台用于海上环境中的自主任务,从而实现导航、避障、物体检测和任务规划。
为什么 Team Bumblebee 选择 SBG Systems?
Bumblebee 团队对各种 IMU 供应商进行了彻底的评估。事实上,由于以下几个关键因素,他们决定与 SBG Systems 合作:
1 – 耐候外壳:SBG Systems 的传感器配备 IP-68 耐候外壳,使其适用于海洋应用。
2 – 制造商的信誉:SBG Systems 在惯性传感器和导航系统领域的声誉在他们的决策中发挥了重要作用。
3 – 技术进步:SBG Systems 的 Ellipse-D 传感器提供了先进的功能,包括双天线 GPS 和改进的航向数据,从而减少了对磁力计校准的需求。
4 – 专家支持:Team Bumblebee 获得了专家提供的宝贵技术建议,这些专家始终可以提供帮助。
准确定向和强大的支持
将 SBG Systems 的 Ellipse-D 集成到他们的系统后,Team Bumblebee 经历了显著的改进:
- 双天线 GNSS:添加双天线 GNSS 消除了磁干扰的影响,提供了准确的方位数据和绝对偏航读数,这对于水体上方的导航至关重要。
- 陀螺仪校准:该团队获得了 SBG Systems 工程师的支持,以解决陀螺仪偏置问题并确保稳定的性能。
完美匹配
Ellipse-D 完美地满足了 Team Bumblebee 的 ASV 应用约束,提供了所需的精度、稳健性和易于集成性。
Team Bumblebee 赞赏使用 SBG Systems 产品带来的多项优势:
✦ 及时支持:支持团队在需要时提供及时的帮助。
✦ 详细的文档:提供全面的数据表和应用指南,有助于集成和故障排除。
✦ 易于集成:SBG Systems 的传感器采用安装孔和即插即用的 USB 连接设计,简化了集成。
✦ 折扣价格:经济高效的定价有利于学生主导的项目。
✦ 防水和耐用的外壳:SBG Systems 传感器的耐候外壳有助于提高其在海洋环境中的耐用性。
Team Bumblebee 喜欢我们的三件事
1 – 真诚和承诺:SBG Systems 表现出了非凡的承诺,超越了典型的供应商-客户关系来支持 Team Bumblebee,不遗余力地帮助团队取得成功。
2 – 工程师的热情和奉献精神:SBG Systems 支持工程师的热情和知识引起了 Team Bumblebee 对机器人技术和技术的热爱。
3 – 丰富的文档和支持:广泛的文档和支持,以及销售团队的协助,使学生团队的集成过程更加顺畅。
Bumblebee 最近参加了在加利福尼亚州圣地亚哥的美国海军 Transdec 设施举行的 2023 年海事 Robosub 挑战赛,共有来自 5 个国家的 35 支队伍参加。他们脱颖而出,成为冠军,以及下面列出的其他成就。
RoboSub 2023 奖项:
- 自主挑战赛第一名
- 系统评估第一名
- 网站第一名
- 第二名设计文档
SBG Systems 向 Team Bumblebee 致以最美好的祝愿,祝愿他们未来一切顺利。
Ellipse-D
Ellipse-D 是一款惯性导航系统,集成了双天线和双频 RTK GNSS,与我们的后处理软件 Qinertia 兼容。
专为机器人和地理空间应用而设计,它可以将里程计输入与 Pulse 或 CAN OBDII 融合,以提高航位推算精度。

请求 Ellipse-D 的报价
您有疑问吗?
欢迎访问我们的常见问题解答 (FAQ) 专区!在这里,您可以找到关于我们展示的应用的最常见问题的答案。如果您找不到您要查找的内容,请随时直接与我们联系!
USV 的惯性导航系统是什么?
用于无人水面艇 (USV) 的惯性制导系统对于精确导航和控制至关重要,尤其是在 GNSS 不可用时。惯性传感器跟踪运动和方向,从而在具有挑战性的环境中实现有效的导航。
惯性导航系统 (INS) 将 IMU 数据与其他系统(如 GNSS 或多普勒计程仪)集成,以提高精度。它们还采用导航算法,例如卡尔曼滤波,来计算位置和速度。
惯性传感器支持自主运行,为各种应用提供精确的航向精度和位置数据。它们确保在 GNSS 受限条件下有效运行,并允许进行实时调整以增强机动性。
IMU 和 INS 之间有什么区别?
惯性测量单元(IMU)与惯性导航系统(INS)的区别在于其功能和复杂程度。
IMU 惯性测量单元)通过加速度计和陀螺仪测量车辆的线性加速度和角速度,并提供原始数据。它提供关于横滚、俯仰、偏航及运动状态的信息,但不会计算位置或导航数据。IMU 传输有关运动和姿态的基本数据,供外部处理以确定位置或速度。
另一方面,INS 惯性导航系统)结合了 IMU 数据与先进算法相结合,计算车辆随时间变化的位置、速度和姿态。它集成了卡尔曼滤波等导航算法,用于传感器融合与数据整合。INS 包括位置、速度和姿态在内的实时导航数据,且无需依赖GNSS外部定位系统。
该导航系统通常应用于需要全面导航解决方案的场景,GNSS的环境中,例如军用无人机、船舶和潜艇。
