Robôs ganham prêmios com nossos sensores
“Os produtos da SBG Systems são de primeira linha, fornecendo toda a precisão de que precisamos. É importante ressaltar que a documentação e o suporte são de primeira qualidade, o que é especialmente benéfico para estudantes como nós. Um agradecimento especial ao Sr. Jérémy Colombel e ao Sr. Nicolas Michel aqui em Singapura, que têm sido especialmente prestativos conosco.” | Isabella Lu, Engenheira Eletricista, Equipe Bumblebee

A Equipe Bumblebee une estudantes inovadores da CDE, SoC e NUS Business School na Universidade Nacional de Singapura. Além disso, eles preveem a criação de sistemas autônomos do futuro. De fato, a equipe projeta e constrói veículos marítimos que navegam debaixo d'água e na superfície. Além disso, seu foco está no avanço da autonomia em ambientes marinhos desafiadores.
Finalmente, estudantes de Engenharia Mecânica, Elétrica, da Computação, Ciência da Computação e Administração contribuem com diversos conhecimentos para a equipe.

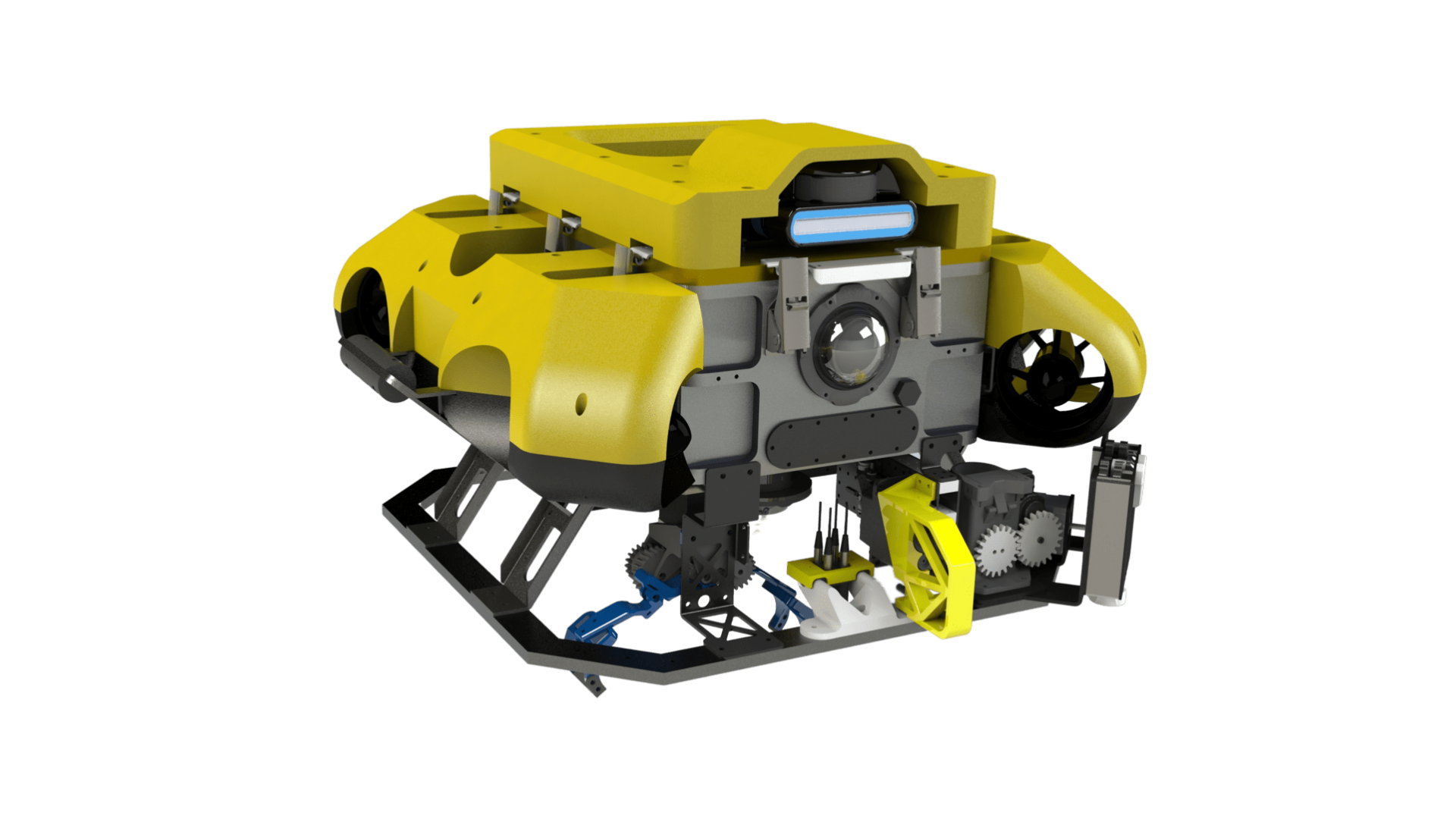
O sistema atual da equipe Bumblebee compreende três veículos com capacidade autônoma: BBAUV4.1 (Veículo Subaquático Autônomo), ASV 3.0 (Veículo de Superfície Autônomo) e Jellyfish (Veículo Aéreo Não Tripulado).
Esses veículos alcançaram um sucesso notável em competições internacionais, como o RoboSub Challenge e o RobotX.
Uma necessidade de INS preciso e robusto
A equipe Bumblebee precisava de uma IMU de alta precisão, robusta e de baixa latência com uma unidade GPS para obter localização e navegação precisas em um ambiente marítimo. Seus principais requisitos incluíam:
- Precisão de Roll & Pitch inferior a 1 grau.
- Compatibilidade com Ubuntu, preferencialmente com um driver ROS ou driver de terceiros prontamente disponível.
- Blindagem magnética interna adequada para evitar interferência.
- Conectores robustos e padrão.
- Suporte para posicionamento RTK (Real-Time Kinematic).
Esses sensores seriam montados em uma plataforma WAM-V modificada usada para missões autônomas no ambiente marítimo, permitindo navegação, desvio de obstáculos, detecção de objetos e planejamento de missão.
Por que a equipe Bumblebee escolheu a SBG Systems?
A Equipe Bumblebee conduziu uma avaliação completa de vários fornecedores de IMU. De fato, eles decidiram fazer parceria com a SBG Systems devido a vários fatores-chave:
1 – Revestimento resistente às intempéries: Os sensores da SBG Systems vinham com revestimentos IP-68 resistentes às intempéries, tornando-os adequados para aplicações marítimas.
2 – Credibilidade do fabricante: A reputação da SBG Systems no campo de sensores inerciais e sistemas de navegação desempenhou um papel significativo em sua decisão.
3 – Avanços técnicos: O sensor Ellipse-D da SBG Systems oferecia recursos avançados, incluindo GPS de antena dupla e dados de direção aprimorados, reduzindo a necessidade de calibração do magnetômetro.
4 – Suporte especializado: A equipe Bumblebee recebeu valiosos conselhos técnicos de especialistas que estavam consistentemente disponíveis para ajudar.
Orientação precisa e forte suporte.
Após integrar o Ellipse-D da SBG Systems em seus sistemas, a equipe Bumblebee experimentou melhorias significativas:
- GNSS de antena dupla: A adição de GNSS de antena dupla eliminou a influência da interferência magnética, fornecendo dados de orientação precisos e leituras de yaw absolutas, cruciais para a navegação acima de corpos d'água.
- Calibração do giroscópio: A equipe recebeu suporte dos engenheiros da SBG Systems para resolver problemas de bias do giroscópio e garantir um desempenho estável.
Uma combinação perfeita
O Ellipse-D correspondeu perfeitamente às restrições de aplicação ASV da equipe Bumblebee, fornecendo a precisão, robustez e facilidade de integração necessárias.
A equipe Bumblebee apreciou vários benefícios do uso dos produtos da SBG Systems:
✦ Suporte imediato: A equipe de suporte forneceu assistência oportuna quando necessário.
✦ Documentação detalhada: Fichas de dados e guias de aplicação abrangentes estavam disponíveis, auxiliando na integração e na resolução de problemas.
✦ Facilidade de integração: Os sensores da SBG Systems foram projetados com orifícios de montagem e conectividade USB plug-and-play, simplificando a integração.
✦ Preços com desconto: O preço acessível foi benéfico para um projeto liderado por estudantes.
✦ Invólucro à prova d'água e durável: Os invólucros resistentes às intempéries dos sensores da SBG Systems contribuíram para sua durabilidade em ambientes marítimos.
Três coisas que a equipe Bumblebee adora em nós
1 – Sinceridade e compromisso: A SBG Systems demonstrou um compromisso notável em apoiar a equipe Bumblebee além de um relacionamento típico fornecedor-cliente, indo além para ajudar no sucesso da equipe.
2 – Paixão e dedicação dos engenheiros: A paixão e o conhecimento dos engenheiros de suporte da SBG Systems ressoaram com o amor da equipe Bumblebee pela robótica e tecnologia.
3 – Ampla documentação e suporte: A extensa documentação e suporte, juntamente com a assistência da equipe de vendas, tornaram o processo de integração mais suave para a equipe de estudantes.
A Bumblebee participou recentemente do Maritime Robosub Challenge 2023, realizado na instalação US Naval Transdec em San Diego, Califórnia, com um total de 35 equipes de 5 países. Eles emergiram como campeões, juntamente com as outras conquistas listadas abaixo.
Prêmios RoboSub 2023:
- 1º Lugar no Desafio de Autonomia
- 1º Lugar na Avaliação do Sistema
- 1º Lugar no Website
- 2º Lugar Documentação do Projeto
A SBG Systems estende os seus melhores votos à equipe Bumblebee por todos os seus futuros empreendimentos.
Ellipse-D
O Ellipse-D é um sistema de navegação inercial que integra uma antena dupla e um GNSS RTK de dupla frequência que é compatível com o nosso software de pós-processamento Qinertia.
Projetado para aplicações robóticas e geoespaciais, ele pode fundir a entrada do odômetro com Pulse ou CAN OBDII para maior precisão de dead-reckoning.

Solicite uma cotação para o Ellipse-D
Você tem perguntas?
Bem-vindo à nossa seção de FAQ! Aqui, você encontrará respostas para as perguntas mais comuns sobre as aplicações que apresentamos. Se você não encontrar o que procura, sinta-se à vontade para nos contatar diretamente!
Qual é o sistema de orientação inercial de um USV?
Um sistema de orientação inercial para um Veículo de Superfície Não Tripulado (USV) é crucial para navegação e controle precisos, especialmente quando o GNSS não está disponível. Os sensores inerciais rastreiam o movimento e a orientação, permitindo uma navegação eficaz em ambientes desafiadores.
Os Sistemas de Navegação Inercial (INS) integram dados da IMU com outros sistemas, como GNSS ou Doppler Velocity Logs, para maior precisão. Eles também empregam algoritmos de navegação, como o Filtro de Kalman, para calcular posição e velocidade.
Os sensores inerciais suportam a operação autônoma, fornecendo dados precisos de direção e posição para diversas aplicações. Eles garantem uma operação eficaz em condições de GNSS negado e permitem ajustes em tempo real para otimizar a capacidade de manobra.
Qual é a diferença entre IMU e INS?
A diferença entre uma Unidade de Medição Inercial (IMU) e um Sistema de Navegação Inercial (INS) reside em sua funcionalidade e complexidade.
Uma IMU unidade de medição inercial) fornece dados brutos sobre a aceleração linear e a velocidade angular do veículo, medidos por acelerômetros e giroscópios. Ela fornece informações sobre rotação, inclinação, guinada e movimento, mas não calcula dados de posição ou navegação. A IMU projetada especificamente para transmitir dados essenciais sobre movimento e orientação para processamento externo, a fim de determinar a posição ou a velocidade.
Por outro lado, um INS sistema de navegação inercial) combina IMU com algoritmos avançados para calcular a posição, a velocidade e a orientação de um veículo ao longo do tempo. Ele incorpora algoritmos de navegação, como a filtragem de Kalman, para fusão e integração de sensores. Um INS dados de navegação em tempo real, incluindo posição, velocidade e orientação, sem depender de sistemas de posicionamento externos, como GNSS.
Esse sistema de navegação é normalmente utilizado em aplicações que exigem soluções de navegação abrangentes, particularmente em ambientes GNSS, como UAVs militares, navios e submarinos.
