用于精准农业的先进运动和姿态数据
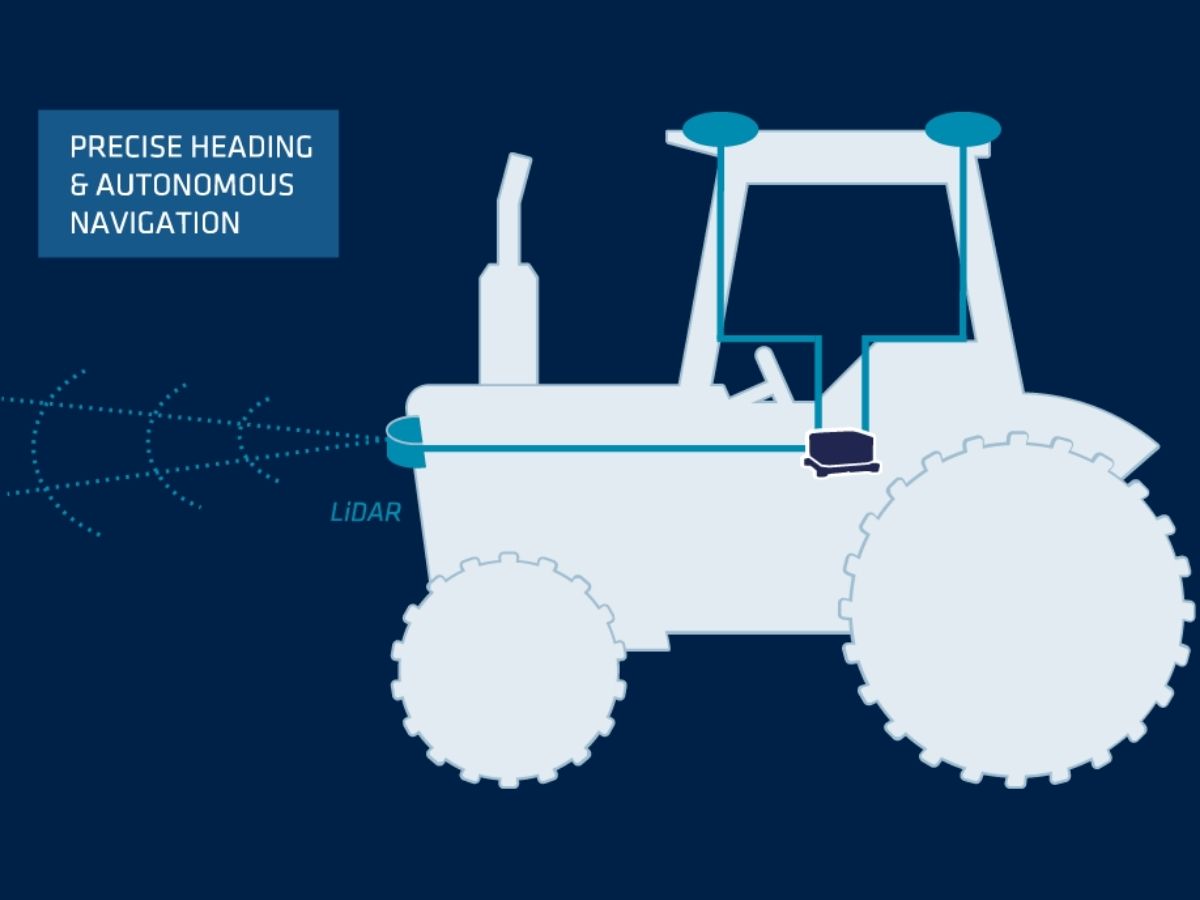
我们的惯性系统提供精确定位和姿态数据,这对于有效管理农用机械至关重要。这种精度水平对于机械除草、种植、喷洒和收割等任务至关重要,即使是微小的偏差也可能导致生产力的大幅损失。我们的 INS 确保农用机械(如自动驾驶拖拉机或农业机器人)可以遵循精确的路径,减少重叠和间隙,从而优化资源利用,并最大限度地减少种子、肥料和农药等投入的使用。
INS 系统在 GNSS 信号可能较弱或不可用的环境中特别有用,例如在树冠下或地形变化显着的区域。INS 与 GNSS 的结合,确保了农业车辆(例如:农业机器人)即使在具有挑战性的条件下也能以厘米级的精度进行导航。
降低智能农业运营成本
通过提高农业作业的准确性,我们的智能农业解决方案有助于降低运营成本,同时消除机械除草等应用中劳动密集型任务。 精确的种植和喷洒意味着只在需要的地方施用投入品,从而减少浪费,并降低种子、肥料和杀虫剂的成本。 此外,通过精确导航获得的效率可减少燃料消耗和机械磨损,从而进一步降低运营费用。
下载我们的宣传册
最大限度地减少环境影响
采用高精度 INS 传感器的精准农业不仅可以提高生产力,还可以最大限度地减少对环境的影响。通过用机械替代品代替化学品,或者通过确保仅在必要时以正确的量施用化学品,这些精准农业技术降低了过度施用的风险,而过度施用会导致径流和水源污染。这种有针对性的方法支持可持续农业实践,有助于保护环境,同时保持精准农业的所有优势并保持高水平的农业产量。
请告诉我们您的项目
我们用于精准农业的解决方案
我们的传感器与精准农业平台无缝集成,即使在最具挑战性的田间条件下也能提供可靠的性能。

Ellipse-D

Ekinox Micro

OEM Ellipse-D
自主应用手册
立即在您的收件箱中收到我们的宣传册!






他们在谈论我们
直接听取已采用我们技术的创新者和客户的意见。
他们的客户评价和成功案例表明,我们的传感器在实际的UAV导航应用中具有显著的影响。
探索其他地理空间应用
了解我们先进的惯性导航和运动传感解决方案如何支持各种地理空间应用。
我们的技术支持许多应用,包括地形测绘和基础设施检查。此外,它还支持移动测绘和环境监测。此外,它可以在任何环境中提供准确可靠的数据。探索地理空间领域的各种可能性。
您有疑问吗?
欢迎访问我们的常见问题解答 (FAQ) 专区!在这里,您可以找到关于我们展示的应用的最常见问题的答案。如果您找不到您要查找的内容,请随时直接与我们联系!
什么是精准农业?
精准农业是一种现代农业方法,它利用技术来监测和管理作物中的田间变异性。其目标是在信息技术的帮助下优化田间管理。以下是其工作原理及其优势的细分:
- 数据收集:农民使用各种工具,如GPS、传感器、无人机和卫星图像,来收集关于土壤条件、作物健康和天气模式的详细数据。这些数据有助于了解田地不同部分的具体需求。
- 分析:分析收集到的数据以识别模式和趋势。这可能包括土壤湿度、养分不足、害虫种群或作物生长速度。
- 变量速率施用:基于分析,农民可以按照不同的变量速率施用诸如水、肥料和杀虫剂等投入,从而满足田地内不同区域的特定需求。例如,土壤贫瘠的区域可能会获得更多的肥料,而养分充足的区域可能会获得较少的肥料。
- 提高效率:通过更精确地应用资源,农民可以减少浪费、降低成本并提高产量。这也有助于通过避免过度使用化学品来最大限度地减少对环境的影响。
- 监测与调整:持续监测可以进行实时调整和持续优化。农民可以跟踪其干预措施的有效性,并根据需要调整其策略。
无人机如何用于农业目的?
无人机越来越多地应用于农业,以加强作物管理并提高生产力。配备高分辨率相机和传感器后,农业无人机可提供关于作物健康状况、土壤条件和地块变异性的航空图像和数据。这使农民能够快速监测大面积区域,并精确识别诸如虫害、养分不足和水分胁迫等问题。
农业无人机用于精准施用肥料、杀虫剂和除草剂等投入品。通过精确定位特定区域,无人机可以减少浪费并最大限度地减少对环境的影响。此外,它们还有助于农业无人机测绘和规划地块布局,并监测作物生长和长期产量。
总的来说,农业无人机提供了一种经济高效的方式来收集关键信息、做出明智的决策和实施有针对性的干预措施,从而改进作物管理和资源利用。
什么是智慧农业?
智能农业通过集成技术来提高效率、生产力和可持续性,从而加强了农业。它使用物联网设备,如传感器和 GPS,来获取关于土壤、天气和作物的实时数据。
农业中的数据分析、自动化和自主机器人(如无人机和自主机械)优化了灌溉和收割等任务。精准农业更准确地应用水和肥料等资源,从而提高产量并减少浪费。人工智能分析数据以进行预测和推荐,而遥感则提供高分辨率的作物和农田洞察。通过优化资源利用和最大限度地减少浪费,智能农业支持可持续性,并依靠高速互联网来实现有效的技术集成和实时管理。
什么是惯性导航?
惯性导航是一种仅使用内部传感器来确定车辆位置、姿态和运动的方法,不依赖于GPS等外部信号。其核心在于,惯性导航系统 (INS) 通过连续跟踪物体在三维空间中的加速度和旋转来测量其运动方式。它使用惯性测量单元 (IMU),其中包含用于感测线性加速度的加速度计和用于测量角速率的陀螺仪。通过对这些测量值进行时间积分,系统可以计算出相对于已知起点的速度、姿态,并最终确定位置。
由于其完全独立性,惯性导航系统可在任何环境——地下、水下、太空或 GNSS 拒止条件下——运行,使其成为导弹、飞机、潜艇、自动驾驶车辆和机器人等应用不可或缺的一部分。现代 INS 解决方案通常将惯性传感器与 GNSS 接收机、磁力计、气压计或 多普勒计程仪 等额外辅助源结合,以减少漂移并提高长期精度。高性能 INS 依赖于精确的传感器校准、先进的滤波算法和强大的误差建模,即使在最严苛的环境中也能提供稳定、可靠的导航数据。
什么是航空摄影测量?
航空摄影测量是通过分析从飞机、无人机或直升机等机载平台拍摄的照片,获取关于地球表面的精确测量和空间信息的科学技术。航空摄影测量背后的基本原理是,通过从不同视点捕获地形的重叠图像,可以通过几何关系重建三维信息。每张照片都是三维世界的二维投影,通过识别多个图像中的共同点,可以使用三角测量法计算出这些点在空间中的精确位置。
现代航空摄影测量高度依赖惯性导航系统 (INS) 和全球导航卫星系统 (GNSS) 提供的精确定位和姿态数据的集成。INS 提供实时测量数据,包括平台的加速度和角速度,这些数据与 GNSS 位置数据结合后,能够高精度地确定图像捕获瞬间相机的定位和姿态。这种集成至关重要,因为它确保摄影测量模型得到正确地理配准,从而减少由平台运动、振动或 GNSS 中断引起的误差。
一旦图像和定位数据被处理,摄影测量师就可以生成详细的数字高程模型 (DEM)、正射影像和测量区域的三维地图。航空摄影测量广泛应用于地形测绘和城市规划到精准农业、林业、环境监测和基础设施检查等领域,这些领域需要在广阔区域内快速、准确和高分辨率的空间信息。高质量的图像、精确的惯性测量和先进的处理算法的结合,已将航空摄影测量转变为科学研究和运营应用的高度可靠的工具。
