Ellipse-D 为自动驾驶卡车提供动力
具有独立车轮驱动和转向系统的自动驾驶卡车。
“SBG Systems 的 Ellipse-D 易于使用、非常精确和稳定,而且外形小巧,所有这些对于我们的 WATonoTruck 开发都至关重要。” | Amir K.,滑铁卢大学教授兼主任

众所周知,道路交通事故的发生是由于驾驶员失误、恶劣天气条件或车辆故障。但是,如果我们能让车辆自动驾驶,避免这些事故,会怎么样呢?例如,自动驾驶卡车或自动驾驶汽车。
这就是自动驾驶车辆背后的理念,滑铁卢大学的机电车辆系统(MVS)实验室正在进行一个名为WATonoTruck(滑铁卢自动卡车)的项目。
这是一种用于重型物料搬运、农业和服务应用的自动驾驶平板卡车。它采用先进的控制方法来分析卡车的运动,尤其是在危险条件或故障情况下,以确保安全和效率。
该实验室旨在将自动驾驶汽车技术的应用扩展到客运之外。他们希望将其应用于农业、采矿和航运等其他行业,从而提高效率并减少运营停机时间。
了解 WATonoTruck
不需要驾驶员的卡车——这就是 WATonoTruck!它是一款具有独立车轮驱动和转向系统的自动驾驶平板卡车。它建立在角模块 (CM) 平台上。
CM 的开发考虑了模块化车辆设计,可以以任何配置安装在任何底盘上。
每个 CM 都可以作为配备自己控制单元的单轮电动汽车运行。它允许独立操作驱动、制动、转向和悬架系统。
这使得卡车非常智能,并且能够适应任何应用和地形。
由 Ellipse-D 赋能的 WATonoTruck
作为高精度定位和导航解决方案的领导者,我们很自豪能与滑铁卢大学的机电车辆系统实验室合作。
我们提供 Ellipse-D,这是一款双天线 RTK INS,可在位置和航向精度方面提供无与伦比的精度。
这种精度水平对于自主导航至关重要,即使在具有挑战性的环境中,也能确保 WATonoTruck 的安全和精确移动。

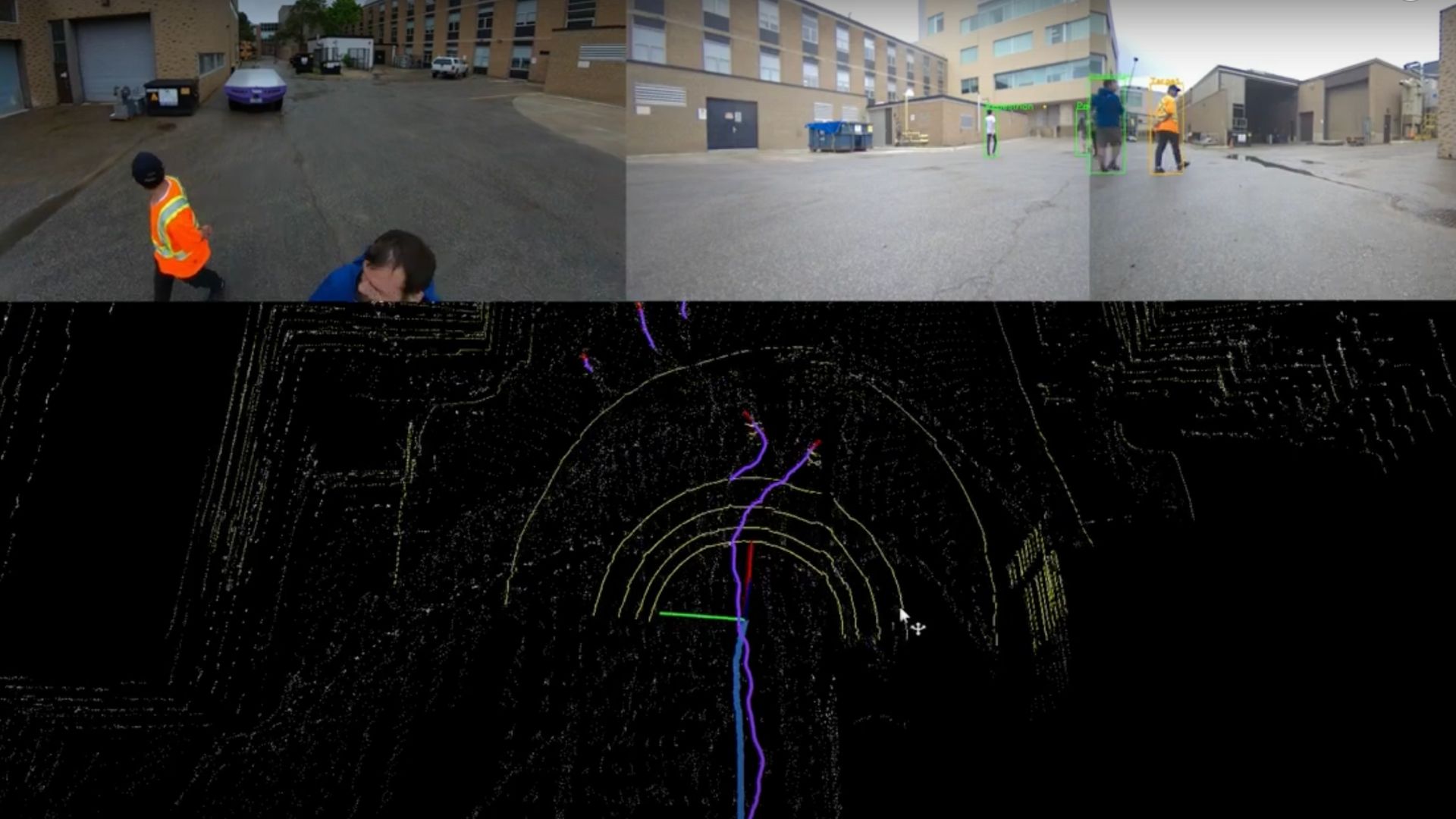
Ellipse-D(第三代)、LiDAR 传感器和先进摄像头——这一全面的传感器套件能够实现实时环境建图、障碍物检测和路径规划。
通过我们的赞助,该实验室对 WATonoTruck 的开发在确保其可信赖的高精度运动和导航方面获得了至关重要的支持。
这一合作努力不仅有助于 WATonoTruck 的成功开发,而且还促进了自动驾驶汽车应用在各行各业的增长,推动了交通及其他领域的创新和安全。

Ellipse-D
Ellipse-D 是一款惯性导航系统,集成了双天线和双频 RTK GNSS,与我们的后处理软件 Qinertia 兼容。
专为机器人和地理空间应用而设计,它可以将里程计输入与 Pulse 或 CAN OBDII 融合,以提高航位推算精度。

请求 Ellipse-D 的报价
您有疑问吗?
欢迎访问我们的常见问题解答 (FAQ) 专区!在这里,您可以找到关于我们展示的应用的最常见问题的答案。如果您找不到您要查找的内容,请随时直接与我们联系!
RTK 和 PPK 之间有什么区别?
实时动态 (RTK) 是一种定位技术,其中 GNSS 校正以近乎实时的方式传输,通常使用 RTCM 格式的校正流。但是,在确保 GNSS 校正(特别是其完整性、可用性、覆盖范围和兼容性)方面可能存在挑战。
与 RTK 后处理相比,PPK 的主要优势在于可以在后处理期间优化数据处理活动,包括正向和反向处理,而在实时处理中,校正及其传输中的任何中断或不兼容都会导致较低的定位精度。
GNSS 后处理 (PPK) 与实时 (RTK) 相比,第一个关键优势是现场使用的系统不需要数据链/无线电来将来自 CORS 的 RTCM 校正馈送到 INS/GNSS 系统 中。
后处理应用的主要限制是最终应用程序需要对环境做出反应。另一方面,如果您的应用程序可以承受生成优化轨迹所需的额外处理时间,它将大大提高所有交付的数据质量。
什么是精确单点定位 (Precise Point Positioning)?
精确单点定位 (PPP) 是一种卫星导航技术,通过校正卫星信号误差来提供高精度定位。与通常依赖地面参考站的传统 GNSS 方法(如 RTK)不同,PPP 利用全球卫星数据和先进算法来提供准确的位置信息。
PPP 在世界任何地方都可以工作,无需本地参考站。这使其适用于缺乏地面基础设施的偏远或具有挑战性的环境中的应用。通过使用精确的卫星轨道和时钟数据,以及对大气和多径效应的校正,PPP 可以最大限度地减少常见的 GNSS 误差,并可以实现厘米级的精度。
PPP 虽然可用于后处理定位(即事后分析收集到的数据),但它也可以提供实时定位解决方案。实时 PPP (RTPPP) 越来越普及,允许用户接收校正并实时确定其位置。
