用于自主导航的紧凑型惯性导航系统
Autonomous navigation in autonomous robot, based on odometry fused with Ellipse-A AHRS, and corrected by LiDAR
“With this winning combination, VIKINGS team reaches a centimeter-level absolute precision (< 3 cm), a technical achievement, which has greatly contributed to their two victories.” | Mr. Merriaux
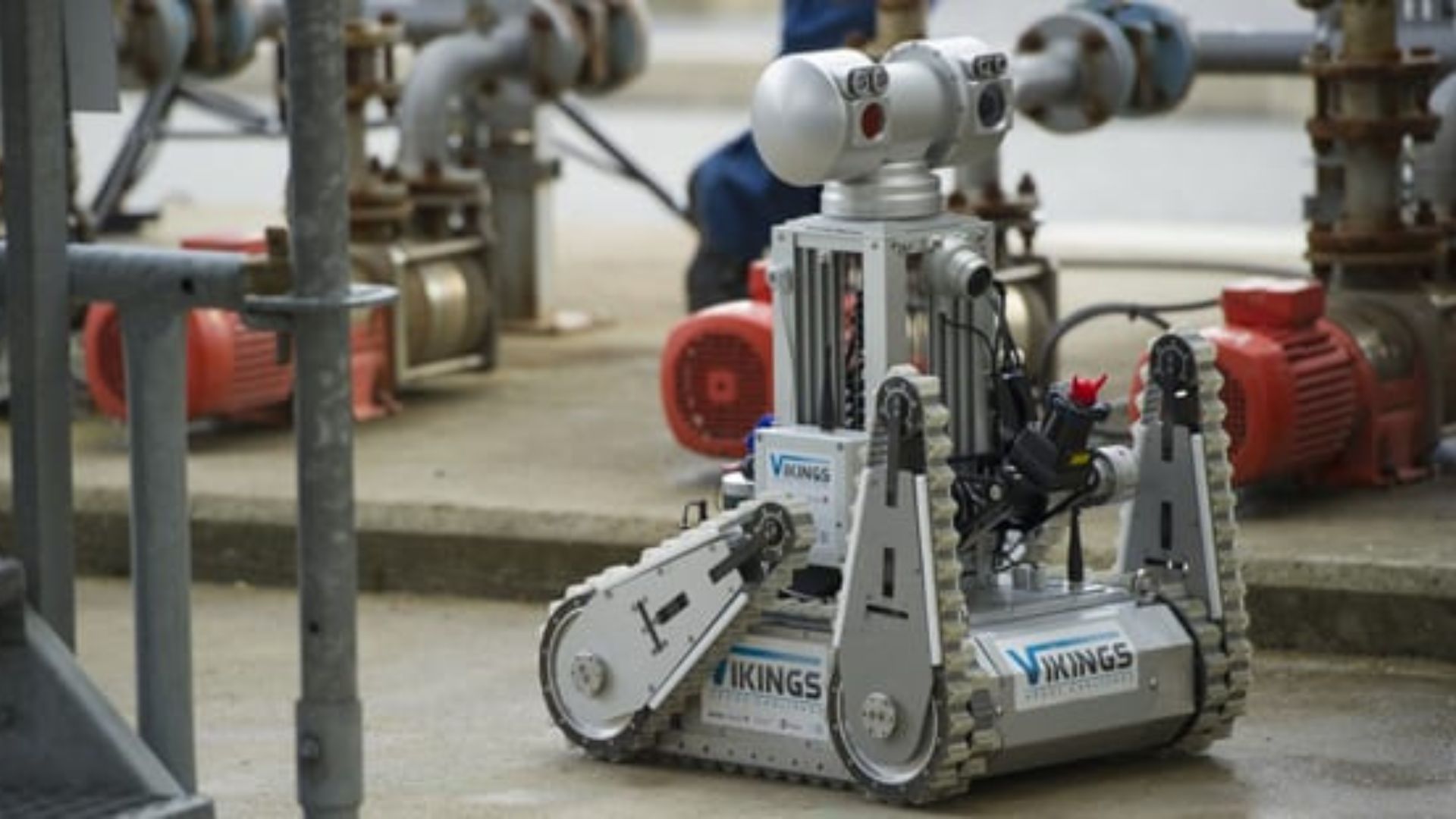
用于石油和天然气站点的自主机器人
ARGOS(天然气和石油站点的自主机器人)挑战赛于 2013 年 12 月启动,由石油和天然气公司 TOTAL 与法国国家研究机构 (ANR) 共同组织。
它旨在在不到三年的时间内推出新一代自主机器人,能够执行检查任务、检测异常情况并应对紧急情况。 这项比赛的目标是建造一种能够在石油和天然气站点移动的自主机器人,以提高 TOTAL 运营商的安全性。
来自多个传感器的数据融合
VIKINGS 的机器人通过将里程计预测与惯性传感器数据融合来计算其位置。此外,它还使用两个 LiDAR(一个在前,一个在后)来校正此信息,以实现 360° 覆盖。
该机器人使用履带,这会在旋转过程中导致滑动。因此,这种车辆类型的里程计精度尤其差。此外,惯性系统对于准确计算航向至关重要。最后,Ellipse-A 充分提供了可靠的横摇和纵倾测量。
达到厘米级定位精度
Already satisfied with SBG SYSTEMS’ products, the choice was naturally the Ellipse-A attitude and heading reference system. “It provides very good pitch and roll performance thanks to low drift gyros” says Mr. Merriaux.
The Ellipse-A is the second generation of miniature inertial sensors of SBG Systems. It integrates low drift gyroscopes and benefits from the experience gained in algorithms design. Industrial-grade, the Ellipse-A is factory calibrated in temperature and dynamics, ensuring data integrity from -40 to 75 ° C. With this winning combination, VIKINGS team reaches a centimeter level absolute precision (< 3 cm), a technical achievement, which has greatly contributed to their two victories.
“The Ellipse-A provides very good pitch and roll performance thanks to low drift gyros” | Mr. Merriaux


Ellipse-A
Ellipse-A 是一款经济实惠且高性能的姿态和航向参考系统 (AHRS)。它嵌入了一流的磁校准程序,可实现最佳航向,并且适用于低到中等动态应用。
这款坚固的惯性运动传感器经过工厂校准,可在 -40°C 至 85°C 的温度范围内提供横摇、纵倾、航向和升沉数据。

询价 Ellipse-A
您有疑问吗?
欢迎访问我们的常见问题解答 (FAQ) 专区!在这里,您可以找到关于我们展示的应用的最常见问题的答案。如果您找不到您要查找的内容,请随时直接与我们联系!
AHRS 和 INS 之间有什么区别?
姿态和航向参考系统 (AHRS) 与惯性导航系统 (INS) 之间的主要区别在于它们的功能和提供的数据范围。
AHRS 提供方向信息,特别是车辆或设备的姿态(俯仰、横滚)和航向(偏航)。它通常使用陀螺仪、加速度计和磁力计等传感器的组合来计算和稳定方向。AHRS 输出三个轴(俯仰、横滚和偏航)中的角位置,使系统能够了解其在空间中的方向。它通常用于航空、无人机、机器人和船舶系统中,以提供准确的姿态和航向数据,这对于车辆控制和稳定至关重要。
INS 不仅提供方向数据(如 AHRS),还跟踪车辆随时间推移的位置、速度和加速度。它使用惯性传感器来估计 3D 空间中的运动,而无需依赖 GNSS 等外部参考。它结合了 AHRS 中的传感器(陀螺仪、加速度计),但也可能包括更高级的位置和速度跟踪算法,通常与 GNSS 等外部数据集成以提高精度。
总而言之,AHRS 侧重于方向(姿态和航向),而 INS 提供全套导航数据,包括位置、速度和方向。
什么是精确单点定位 (Precise Point Positioning)?
精确单点定位 (PPP) 是一种卫星导航技术,通过校正卫星信号误差来提供高精度定位。与通常依赖地面参考站的传统 GNSS 方法(如 RTK)不同,PPP 利用全球卫星数据和先进算法来提供准确的位置信息。
PPP 在世界任何地方都可以工作,无需本地参考站。这使其适用于缺乏地面基础设施的偏远或具有挑战性的环境中的应用。通过使用精确的卫星轨道和时钟数据,以及对大气和多径效应的校正,PPP 可以最大限度地减少常见的 GNSS 误差,并可以实现厘米级的精度。
PPP 虽然可用于后处理定位(即事后分析收集到的数据),但它也可以提供实时定位解决方案。实时 PPP (RTPPP) 越来越普及,允许用户接收校正并实时确定其位置。
