Kompaktowy system nawigacji inercyjnej używany do autonomicznej nawigacji
Autonomous navigation in autonomous robot, based on odometry fused with Ellipse-A AHRS, and corrected by LiDAR
“With this winning combination, VIKINGS team reaches a centimeter-level absolute precision (< 3 cm), a technical achievement, which has greatly contributed to their two victories.” | Mr. Merriaux
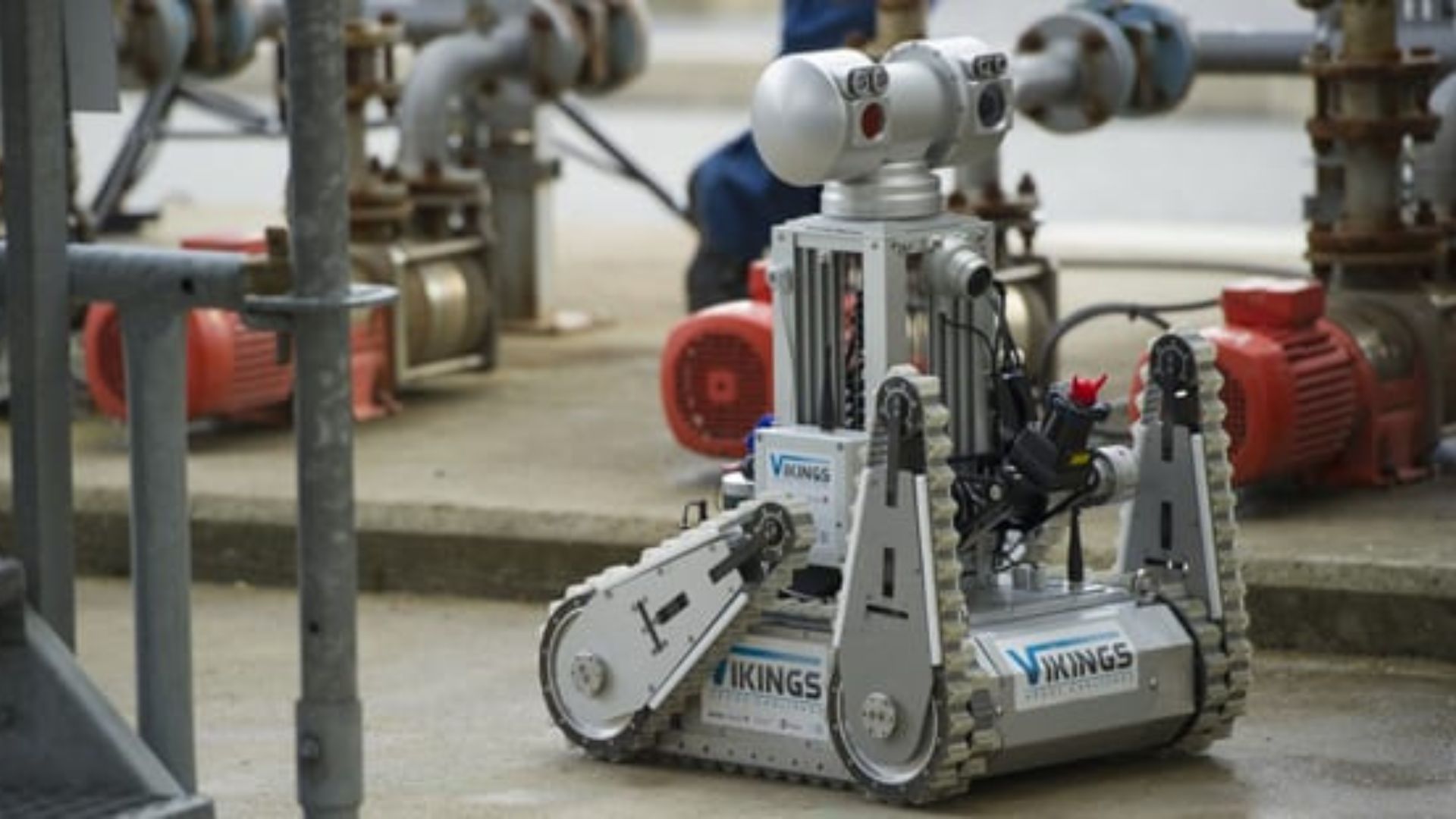
Autonomiczny robot dla platform wiertniczych
Konkurs ARGOS (Autonomous Robot for Gas and Oil Sites), zainicjowany w grudniu 2013 roku, jest organizowany przez firmę naftowo-gazową TOTAL we współpracy z Francuską Narodową Agencją ds. Badań Naukowych (ANR).
Jego celem jest stworzenie w ciągu niespełna trzech lat nowej generacji robotów autonomicznych zdolnych do wykonywania zadań inspekcyjnych, wykrywania anomalii i reagowania w sytuacjach awaryjnych. Celem tego konkursu jest zbudowanie autonomicznego robota zdolnego do poruszania się po terenach zakładów naftowych i gazowych w celu zwiększenia bezpieczeństwa operatorów TOTAL.
Fuzja danych z wielu czujników
Robot VIKINGS oblicza swoją pozycję, łącząc przewidywania odometryczne z danymi z czujników inercyjnych. Co więcej, koryguje te informacje za pomocą dwóch LiDAR-ów, jednego z przodu i jednego z tyłu, dla pokrycia 360°.
Robot wykorzystuje gąsienice, które powodują ślizganie się podczas obrotów. Dlatego ten typ pojazdu sprawia, że dokładność odometrii jest szczególnie niska. Co więcej, system inercyjny staje się niezbędny do dokładnego obliczania heading. Wreszcie, Ellipse w pełni zapewnia wiarygodne pomiary roll i pitch.
Osiągnięcie dokładności pozycji na poziomie centymetra
Already satisfied with SBG SYSTEMS’ products, the choice was naturally the Ellipse-A attitude and heading reference system. “It provides very good pitch and roll performance thanks to low drift gyros” says Mr. Merriaux.
The Ellipse-A is the second generation of miniature inertial sensors of SBG Systems. It integrates low drift gyroscopes and benefits from the experience gained in algorithms design. Industrial-grade, the Ellipse-A is factory calibrated in temperature and dynamics, ensuring data integrity from -40 to 75 ° C. With this winning combination, VIKINGS team reaches a centimeter level absolute precision (< 3 cm), a technical achievement, which has greatly contributed to their two victories.
“The Ellipse-A provides very good pitch and roll performance thanks to low drift gyros” | Mr. Merriaux


Ellipse-A
Ellipse-A to przystępny cenowo i wysokowydajny system odniesienia położenia i kursu (AHRS). Zawiera najlepszą w swojej klasie procedurę kalibracji magnetycznej dla optymalnego określania kursu i jest odpowiedni do zastosowań o niskiej i średniej dynamice.
Fabrycznie skalibrowany w zakresie od -40°C do 85°C, ten solidny inercyjny czujnik ruchu dostarcza dane dotyczące Roll, Pitch, kursu (Heading) i kołysania (Heave).

Zapytaj o wycenę Ellipse-A
Masz pytania?
Witamy w naszej sekcji FAQ! Znajdziesz tutaj odpowiedzi na najczęściej zadawane pytania dotyczące prezentowanych przez nas aplikacji. Jeśli nie znajdziesz tego, czego szukasz, skontaktuj się z nami bezpośrednio!
Jaka jest różnica między AHRS a INS?
Główna różnica między Attitude and Heading Reference System (AHRS) a Inertial Navigation System (INS) polega na ich funkcjonalności i zakresie dostarczanych danych.
AHRS dostarcza informacji o orientacji — w szczególności o położeniu (pitch, roll) i kierunku (yaw) pojazdu lub urządzenia. Zazwyczaj wykorzystuje kombinację czujników, w tym żyroskopy, akcelerometry i magnetometry, do obliczania i stabilizacji orientacji. AHRS podaje pozycję kątową w trzech osiach (pitch, roll i yaw), umożliwiając systemowi zrozumienie jego orientacji w przestrzeni. Jest często stosowany w lotnictwie, UAV, robotyce i systemach morskich w celu zapewnienia dokładnych danych o położeniu i kierunku, co ma kluczowe znaczenie dla kontroli i stabilizacji pojazdu.
INS nie tylko dostarcza dane o orientacji (jak AHRS), ale także śledzi pozycję, prędkość i przyspieszenie pojazdu w czasie. Wykorzystuje czujniki inercyjne do szacowania ruchu w przestrzeni 3D bez polegania na zewnętrznych odniesieniach, takich jak GNSS. Łączy czujniki znajdujące się w AHRS (żyroskopy, akcelerometry), ale może również zawierać bardziej zaawansowane algorytmy do śledzenia pozycji i prędkości, często integrując się z danymi zewnętrznymi, takimi jak GNSS, dla zwiększenia dokładności.
Podsumowując, AHRS koncentruje się na orientacji (pozycji i heading), podczas gdy INS dostarcza pełny zestaw danych nawigacyjnych, w tym pozycję, prędkość i orientację.
Co to jest Precise Point Positioning?
Precise Point Positioning (PPP) to technika nawigacji satelitarnej, która oferuje bardzo precyzyjne pozycjonowanie dzięki korygowaniu błędów sygnału satelitarnego. W przeciwieństwie do tradycyjnych metod GNSS, które często opierają się na naziemnych stacjach referencyjnych (jak w RTK), PPP wykorzystuje globalne dane satelitarne i zaawansowane algorytmy, aby zapewnić dokładne informacje o położeniu.
PPP działa w dowolnym miejscu na świecie bez potrzeby korzystania z lokalnych stacji referencyjnych. Dzięki temu nadaje się do zastosowań w odległych lub wymagających środowiskach, gdzie brakuje infrastruktury naziemnej. Wykorzystując precyzyjne dane dotyczące orbity i zegara satelity, wraz z poprawkami dotyczącymi wpływu atmosfery i odbioru wielodrożnego, PPP minimalizuje typowe błędy GNSS i może osiągnąć dokładność na poziomie centymetrów.
Podczas gdy PPP może być wykorzystywane do pozycjonowania po przetworzeniu, które polega na analizie zebranych danych po fakcie, może również dostarczać rozwiązania do pozycjonowania w czasie rzeczywistym. PPP w czasie rzeczywistym (RTPPP) jest coraz szerzej dostępne, umożliwiając użytkownikom otrzymywanie poprawek i określanie swojej pozycji w czasie rzeczywistym.
