Sistema de navegação inercial compacto usado para navegação autônoma
Autonomous navigation in autonomous robot, based on odometry fused with Ellipse-A AHRS, and corrected by LiDAR
“With this winning combination, VIKINGS team reaches a centimeter-level absolute precision (< 3 cm), a technical achievement, which has greatly contributed to their two victories.” | Mr. Merriaux
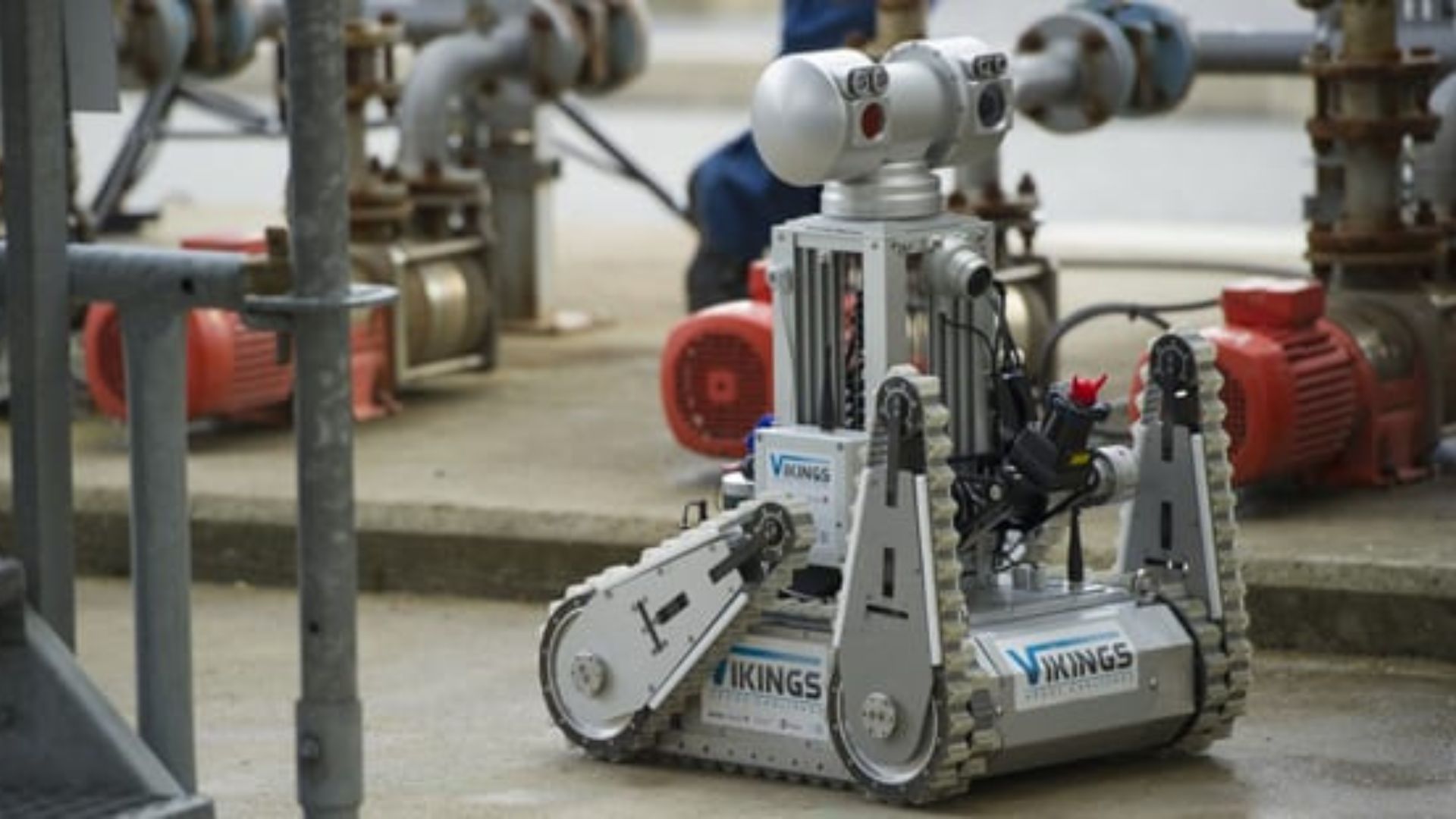
Robô autônomo para locais de petróleo e gás
Lançado em dezembro de 2013, o ARGOS (Robô Autônomo para Sítios de Gás e Petróleo) Challenge é organizado pela empresa de petróleo e gás TOTAL com a Agência Nacional de Pesquisa Francesa (ANR).
Seu objetivo é trazer à tona em menos de três anos uma nova geração de robôs autônomos capazes de realizar tarefas de inspeção, detectar anomalias e responder a emergências. O objetivo desta competição é construir um robô autônomo capaz de se mover em sítios de petróleo e gás para aumentar a segurança dos operadores da TOTAL.
Fusão de dados de vários sensores
O robô da VIKINGS calcula sua posição fundindo a previsão de odometria com os dados do sensor inercial. Além disso, ele corrige essas informações usando dois LiDARs, um frontal e um traseiro, para cobertura de 360°.
O robô usa esteiras, que causam deslizamento durante as rotações. Portanto, este tipo de veículo torna a precisão da odometria especialmente ruim. Além disso, o sistema inercial torna-se essencial para calcular o heading com precisão. Finalmente, o Ellipse-A fornece totalmente medições confiáveis de roll e pitch.
Alcançando o posicionamento em nível de centímetro
Already satisfied with SBG SYSTEMS’ products, the choice was naturally the Ellipse-A attitude and heading reference system. “It provides very good pitch and roll performance thanks to low drift gyros” says Mr. Merriaux.
The Ellipse-A is the second generation of miniature inertial sensors of SBG Systems. It integrates low drift gyroscopes and benefits from the experience gained in algorithms design. Industrial-grade, the Ellipse-A is factory calibrated in temperature and dynamics, ensuring data integrity from -40 to 75 ° C. With this winning combination, VIKINGS team reaches a centimeter level absolute precision (< 3 cm), a technical achievement, which has greatly contributed to their two victories.
“The Ellipse-A provides very good pitch and roll performance thanks to low drift gyros” | Mr. Merriaux


Ellipse-A
O Ellipse-A é um sistema de referência de Atitude e Heading (AHRS) acessível e de alto desempenho. Ele incorpora um procedimento de calibração magnética de primeira classe para heading ideal e é adequado para aplicações dinâmicas de baixa a média intensidade.
Calibrado de fábrica de -40°C a 85°C, este robusto sensor de movimento inercial fornece dados de Roll, Pitch, Heading e Heave.

Solicite uma cotação para o Ellipse-A
Você tem perguntas?
Bem-vindo à nossa seção de FAQ! Aqui, você encontrará respostas para as perguntas mais comuns sobre as aplicações que apresentamos. Se você não encontrar o que procura, sinta-se à vontade para nos contatar diretamente!
Qual é a diferença entre AHRS e INS?
A principal diferença entre um Attitude and Heading Reference System (AHRS) e um Inertial Navigation System (INS) reside em sua funcionalidade e no escopo dos dados que eles fornecem.
O AHRS fornece informações de orientação — especificamente, a atitude (inclinação, rotação) e direção (guinada) de um veículo ou dispositivo. Ele normalmente usa uma combinação de sensores, incluindo giroscópios, acelerômetros e magnetômetros, para calcular e estabilizar a orientação. O AHRS emite a posição angular em três eixos (inclinação, rotação e guinada), permitindo que um sistema entenda sua orientação no espaço. É frequentemente usado em aviação, UAVs, robótica e sistemas marítimos para fornecer dados precisos de atitude e direção, o que é fundamental para o controle e estabilização do veículo.
Um INS não apenas fornece dados de orientação (como um AHRS), mas também rastreia a posição, velocidade e aceleração de um veículo ao longo do tempo. Ele usa sensores inerciais para estimar o movimento no espaço 3D sem depender de referências externas como GNSS. Ele combina os sensores encontrados em AHRS (giroscópios, acelerômetros), mas também pode incluir algoritmos mais avançados para rastreamento de posição e velocidade, muitas vezes integrando-se com dados externos como GNSS para maior precisão.
Em resumo, o AHRS se concentra na orientação (atitude e direção), enquanto o INS fornece um conjunto completo de dados de navegação, incluindo posição, velocidade e orientação.
O que é Posicionamento Pontual Preciso?
O Posicionamento Pontual Preciso (PPP) é uma técnica de navegação por satélite que oferece posicionamento de alta precisão, corrigindo erros de sinal de satélite. Ao contrário dos métodos GNSS tradicionais, que geralmente dependem de estações de referência terrestres (como no RTK), o PPP utiliza dados globais de satélite e algoritmos avançados para fornecer informações de localização precisas.
O PPP funciona em qualquer lugar do mundo sem a necessidade de estações de referência locais. Isso o torna adequado para aplicações em ambientes remotos ou desafiadores, onde a infraestrutura terrestre é inexistente. Ao utilizar dados precisos de órbita e clock de satélite, juntamente com correções para efeitos atmosféricos e de multicaminhos, o PPP minimiza erros comuns de GNSS e pode alcançar precisão em nível de centímetro.
Embora o PPP possa ser utilizado para posicionamento pós-processado, que envolve a análise de dados coletados posteriormente, ele também pode fornecer soluções de posicionamento em tempo real. O PPP em tempo real (RTPPP) está cada vez mais disponível, permitindo que os usuários recebam correções e determinem sua posição em tempo real.
