自律航法に使用されるコンパクトな慣性航法システム
Autonomous navigation in autonomous robot, based on odometry fused with Ellipse-A AHRS, and corrected by LiDAR
“With this winning combination, VIKINGS team reaches a centimeter-level absolute precision (< 3 cm), a technical achievement, which has greatly contributed to their two victories.” | Mr. Merriaux
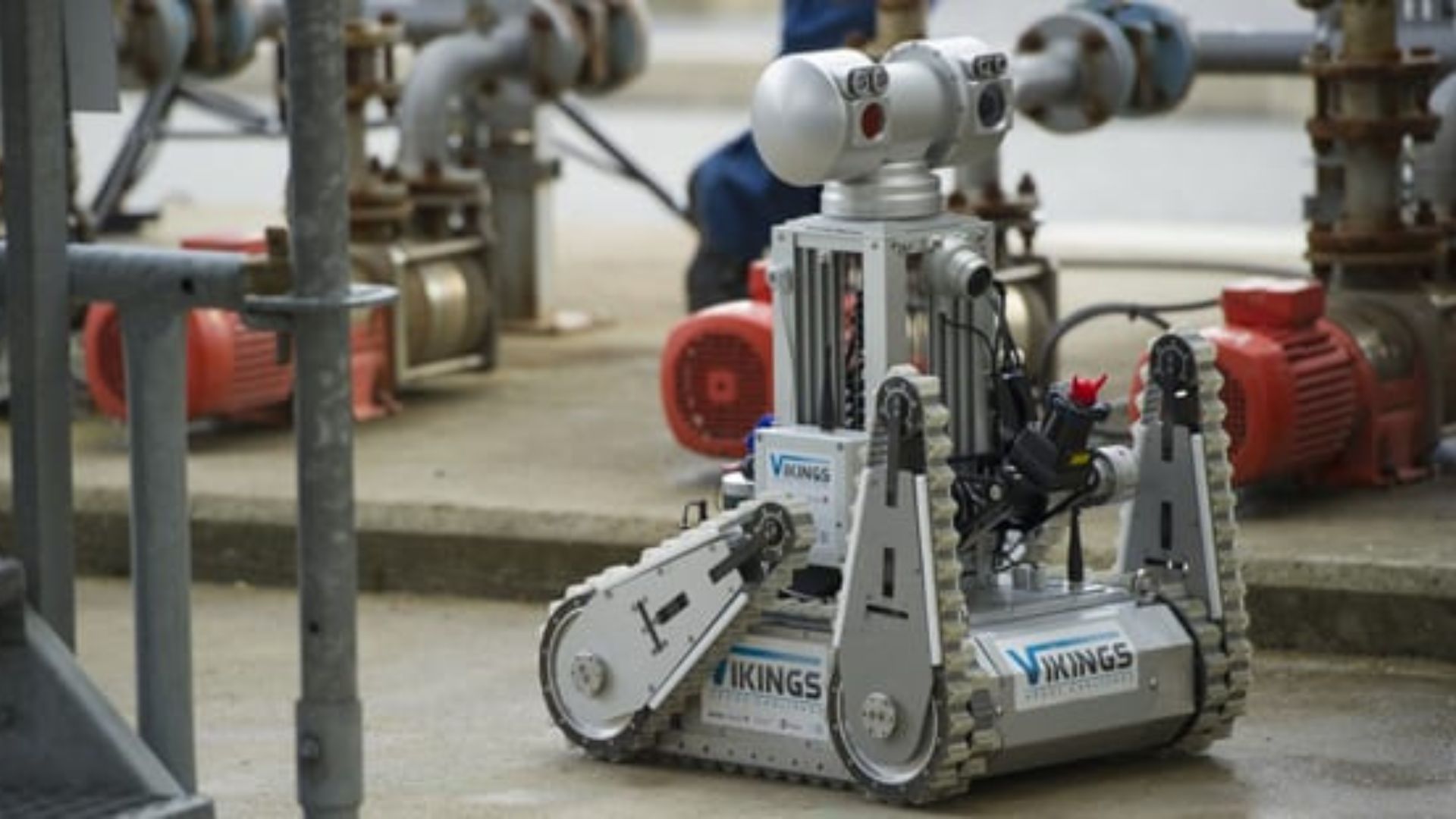
石油・ガス施設用自律型ロボット
2013年12月に開始されたARGOS(Autonomous Robot for Gas and Oil Sites)チャレンジは、石油・ガス会社TOTALとフランス国立研究機構(ANR)によって組織されています。
これは、3年以内に、検査タスクを実行し、異常を検出し、緊急事態に対応できる新世代の自律型ロボットを生み出すことを目的としています。この競技会の目的は、TOTALオペレーターのセキュリティを強化するために、石油およびガスサイトを移動できる自律型ロボットを構築することです。
複数のセンサーからのデータ融合
VIKINGSのロボットは、オドメトリ予測と慣性センサーデータを融合して位置を計算します。さらに、360°の coverage のために、前面と背面に1つずつ、2つのLiDARを使用してこの情報を修正します。
ロボットは、回転中に滑りを引き起こすキャタピラーを使用します。したがって、このタイプの車両では、オドメトリの精度が特に低くなります。また、慣性システムは、ヘディングを正確に計算するために不可欠になります。最後に、Ellipse-Aは、信頼性の高いロールとピッチの測定を完全に提供します。
センチメートルレベルの位置に到達
Already satisfied with SBG SYSTEMS’ products, the choice was naturally the Ellipse-A attitude and heading reference system. “It provides very good pitch and roll performance thanks to low drift gyros” says Mr. Merriaux.
The Ellipse-A is the second generation of miniature inertial sensors of SBG Systems. It integrates low drift gyroscopes and benefits from the experience gained in algorithms design. Industrial-grade, the Ellipse-A is factory calibrated in temperature and dynamics, ensuring data integrity from -40 to 75 ° C. With this winning combination, VIKINGS team reaches a centimeter level absolute precision (< 3 cm), a technical achievement, which has greatly contributed to their two victories.
“The Ellipse-A provides very good pitch and roll performance thanks to low drift gyros” | Mr. Merriaux



Ellipse-Aの見積もりを依頼する
ご質問はありますか?
FAQセクションへようこそ!ここでは、ご紹介するアプリケーションに関する最も一般的な質問への回答をご覧いただけます。お探しの情報が見つからない場合は、お気軽にお問い合わせください。
AHRSとINSの違いは何ですか?
Attitude and Heading Reference System(AHRS)とInertial Navigation System(INS)の主な違いは、その機能と提供するデータの範囲にあります。
AHRS は、車両またはデバイスの姿勢(ピッチ、ロール)および方位(ヨー)に関する情報を提供します。通常、ジャイロスコープ、加速度計、磁力計などのセンサーの組み合わせを使用して、姿勢を計算および安定化します。AHRS は、3 軸(ピッチ、ロール、ヨー)の角度位置を出力し、システムが空間内での姿勢を理解できるようにします。航空、UAV、ロボット工学、および海洋システムで、正確な姿勢および方位データを提供するために使用されることが多く、これは車両の制御および安定化に不可欠です。
INSは、姿勢データ(AHRSなど)を提供するだけでなく、車両の位置、速度、および加速度を時間とともに追跡します。慣性センサーを使用して、GNSSのような外部参照に依存せずに、3D空間での動きを推定します。AHRS(ジャイロスコープ、加速度計)にあるセンサーを組み合わせますが、位置と速度の追跡のためのより高度なアルゴリズムも含まれる場合があり、多くの場合、精度を高めるためにGNSSのような外部データと統合されます。
要約すると、AHRSは向き(姿勢と方位)に焦点を当てていますが、INSは位置、速度、向きを含むナビゲーションデータの完全なスイートを提供します。
Precise Point Positioningとは?
Precise Point Positioning(PPP)は、衛星信号誤差を修正することにより、高精度測位を提供する衛星ナビゲーション技術です。従来のGNSS方式(RTKなど)とは異なり、PPPはグローバル衛星データと高度なアルゴリズムを利用して、正確な位置情報を提供します。
PPPは、ローカルリファレンスステーションを必要とせずに、世界のどこでも機能します。これにより、地上インフラストラクチャが不足している遠隔地や困難な環境でのアプリケーションに適しています。正確な衛星軌道およびクロックデータを使用し、大気およびマルチパス効果の補正とともに、PPPは一般的なGNSS誤差を最小限に抑え、センチメートルレベルの精度を達成できます。
PPPは、収集したデータを事後に分析する後処理測位に利用できる一方で、リアルタイム測位ソリューションも提供可能です。リアルタイムPPP(RTPPP)は利用が拡大しており、ユーザーはリアルタイムで補正を受信し、自己位置を決定できます。
