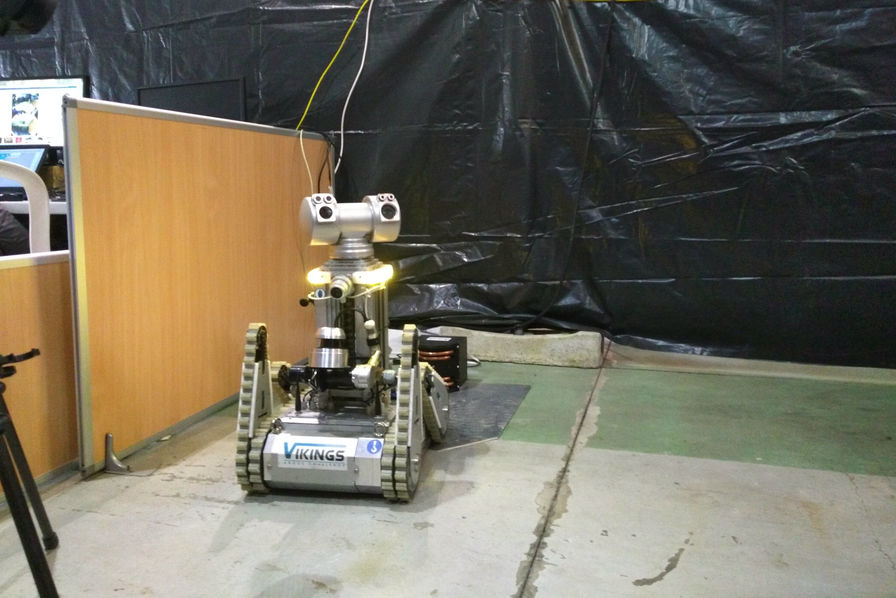
Sistema di navigazione inerziale compatto utilizzato per la navigazione autonoma
Autonomous navigation in autonomous robot, based on odometry fused with Ellipse-A AHRS, and corrected by LiDAR
“With this winning combination, VIKINGS team reaches a centimeter-level absolute precision (< 3 cm), a technical achievement, which has greatly contributed to their two victories.” | Mr. Merriaux
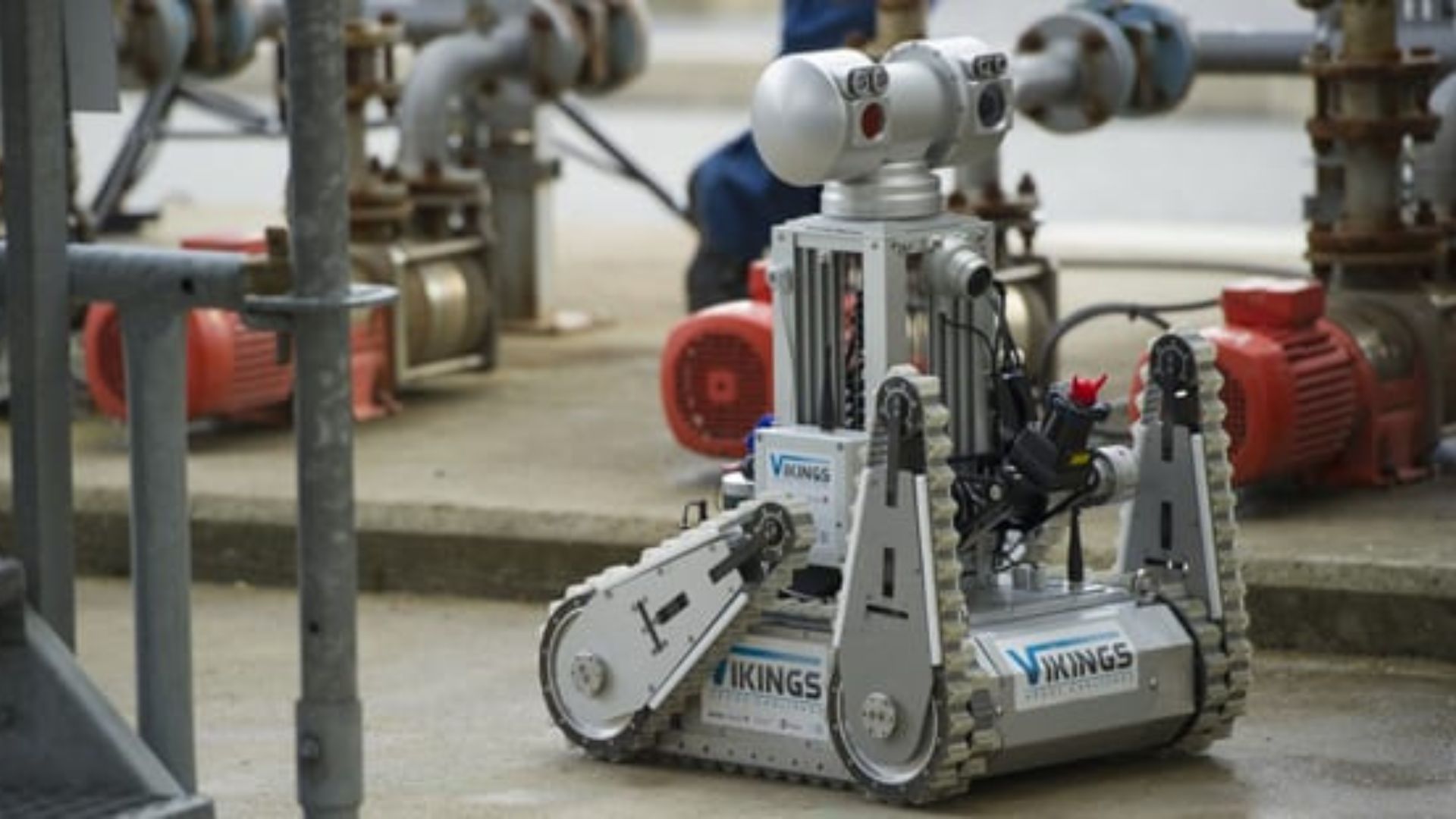
Robot autonomo per siti petroliferi e del gas
Lanciata nel dicembre 2013, la ARGOS (Autonomous Robot for Gas and Oil Sites) Challenge è organizzata dalla compagnia petrolifera e del gas TOTAL con l'Agenzia Nazionale di Ricerca francese (ANR).
Mira a far emergere in meno di tre anni una nuova generazione di robot autonomi in grado di eseguire compiti di ispezione, rilevare anomalie e rispondere alle emergenze. L'obiettivo di questa competizione è costruire un robot autonomo capace di muoversi su siti petroliferi e del gas per migliorare la sicurezza degli operatori TOTAL.
Data fusion da sensori multipli
Il robot di VIKINGS calcola la sua posizione fondendo la previsione dell'odometria con i dati del sensore inerziale. Inoltre, corregge queste informazioni utilizzando due LiDAR, uno anteriore e uno posteriore, per una copertura a 360°.
Il robot utilizza cingoli, che causano slittamento durante le rotazioni. Pertanto, questo tipo di veicolo rende la precisione dell'odometria particolarmente scarsa. Inoltre, il sistema inerziale diventa essenziale per calcolare l'orientamento con precisione. Infine, l'Ellipse-A fornisce pienamente misurazioni affidabili di rollio e beccheggio.
Raggiungimento di un posizionamento a livello centimetrico
Already satisfied with SBG SYSTEMS’ products, the choice was naturally the Ellipse-A attitude and heading reference system. “It provides very good pitch and roll performance thanks to low drift gyros” says Mr. Merriaux.
The Ellipse-A is the second generation of miniature inertial sensors of SBG Systems. It integrates low drift gyroscopes and benefits from the experience gained in algorithms design. Industrial-grade, the Ellipse-A is factory calibrated in temperature and dynamics, ensuring data integrity from -40 to 75 ° C. With this winning combination, VIKINGS team reaches a centimeter level absolute precision (< 3 cm), a technical achievement, which has greatly contributed to their two victories.
“The Ellipse-A provides very good pitch and roll performance thanks to low drift gyros” | Mr. Merriaux


Ellipse-A
Ellipse-A è un sistema di riferimento di assetto e direzione (AHRS) conveniente e ad alte prestazioni. Integra una procedura di calibrazione magnetica best-in-class per una direzione ottimale ed è adatto per applicazioni dinamiche da basse a medie.
Calibrato in fabbrica da -40°C a 85°C, questo robusto sensore di movimento inerziale fornisce dati di rollio, beccheggio, direzione e heave.

Richiedi un preventivo per Ellipse-A
Ha delle domande?
Benvenuti nella nostra sezione FAQ! Qui troverete le risposte alle domande più comuni sulle applicazioni che presentiamo. Se non trovate quello che state cercando, non esitate a contattarci direttamente!
Qual è la differenza tra AHRS e INS?
La principale differenza tra un Attitude and Heading Reference System (AHRS) e un Inertial Navigation System (INS) risiede nella loro funzionalità e nella portata dei dati che forniscono.
AHRS fornisce informazioni sull'orientamento, in particolare, l'assetto (beccheggio, rollio) e l'heading (imbardata) di un veicolo o dispositivo. In genere utilizza una combinazione di sensori, tra cui giroscopi, accelerometri e magnetometri, per calcolare e stabilizzare l'orientamento. L'AHRS restituisce la posizione angolare su tre assi (beccheggio, rollio e imbardata), consentendo a un sistema di comprendere il proprio orientamento nello spazio. Viene spesso utilizzato in aviazione, UAV, robotica e sistemi marini per fornire dati accurati di assetto e heading, fondamentali per il controllo e la stabilizzazione del veicolo.
Un INS non solo fornisce dati di orientamento (come un AHRS) ma traccia anche la posizione, la velocità e l'accelerazione di un veicolo nel tempo. Utilizza sensori inerziali per stimare il movimento nello spazio 3D senza fare affidamento su riferimenti esterni come il GNSS. Combina i sensori presenti negli AHRS (giroscopi, accelerometri) ma può anche includere algoritmi più avanzati per il tracciamento di posizione e velocità, spesso integrandosi con dati esterni come il GNSS per una maggiore precisione.
In sintesi, l'AHRS si concentra sull'orientamento (assetto e prua), mentre l'INS fornisce una suite completa di dati di navigazione, inclusi posizione, velocità e orientamento.
Cos'è il Precise Point Positioning?
Il Precise Point Positioning (PPP) è una tecnica di navigazione satellitare che offre un posizionamento ad alta precisione correggendo gli errori del segnale satellitare. A differenza dei metodi GNSS tradizionali, che spesso si basano su stazioni di riferimento a terra (come in RTK), il PPP utilizza dati satellitari globali e algoritmi avanzati per fornire informazioni accurate sulla posizione.
Il PPP funziona ovunque nel mondo senza la necessità di stazioni di riferimento locali. Questo lo rende adatto per applicazioni in ambienti remoti o difficili dove mancano infrastrutture a terra. Utilizzando dati precisi sull'orbita e sull'orologio dei satelliti, insieme a correzioni per gli effetti atmosferici e multipath, il PPP minimizza gli errori GNSS comuni e può raggiungere un'accuratezza a livello di centimetro.
Mentre il PPP può essere utilizzato per il posizionamento post-processato, che implica l'analisi dei dati raccolti a posteriori, può anche fornire soluzioni di posizionamento in tempo reale. Il PPP in tempo reale (RTPPP) è sempre più disponibile, consentendo agli utenti di ricevere correzioni e determinare la loro posizione in tempo reale.
