Análisis de aceleración de balanceo e inclinación de motocicletas
Velocidad de la moto, aceleración lateral y ángulo de inclinación (balanceo de la moto).
“Les gusta el tamaño compacto del Ellipse-N y la impresionante robustez de la posición, junto con el protocolo de comunicación CAN y la buena precisión incluso en condiciones de vibración.” | Ashish S., Director de Zen Microsystems

Prueba de neumáticos
La calidad y el rendimiento de los neumáticos son componentes cruciales para la seguridad y la comodidad de las bicicletas. Los fabricantes de vehículos de dos ruedas examinan de cerca el rendimiento de los neumáticos a la hora de seleccionar a sus proveedores.
Una empresa india fabricante de neumáticos se puso en contacto con Zen Microsystems para probar la buena adherencia de sus neumáticos, así como las capacidades de giro en comparación con los neumáticos del líder del mercado.
Zen Microsystems es un reconocido distribuidor indio de equipos de prueba. La empresa realizó un análisis completo de los neumáticos utilizando el Ellipse-A Attitude and Heading Reference System (AHRS) de SBG Systems.
Resultados de la prueba
La prueba tuvo lugar en un circuito de conducción. El equipo de Zen Microsystems instaló el Ellipse-A conectado a un registrador de datos CAN con receptor GPS integrado.
La moto estaba equipada con los neumáticos del cliente de Zen y, a continuación, con los neumáticos del líder del mercado para realizar un análisis comparativo. Para ambas pruebas, se utilizó el mismo equipo de prueba para detectar la velocidad, la aceleración lateral y el ángulo de inclinación de la moto (balanceo de la moto).
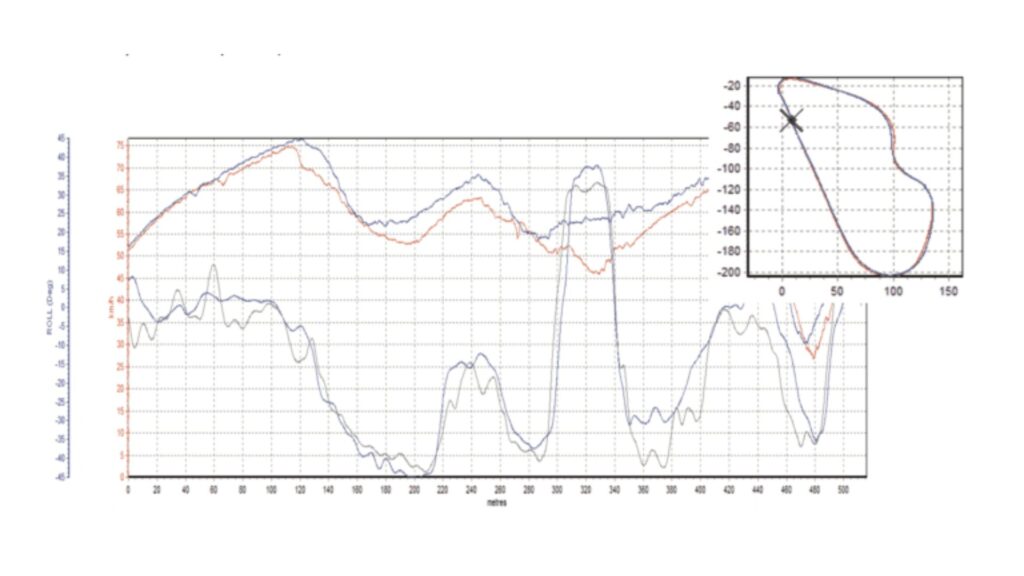
El análisis mostró que en la misma curva (curva), con mayor velocidad, los neumáticos del cliente de Zen Microsystems permitían un mayor balanceo de la moto durante las curvas, más aceleraciones laterales, lo que significa una mayor adherencia de los neumáticos a la carretera (mayor agarre a la carretera).
AHRS vs INS con receptor GNSS integrado
Este análisis completo fue determinante para el cliente, quien pudo demostrar la alta calidad de sus productos al fabricante de vehículos de dos ruedas.
El Ellipse-A AHRS utilizado para la prueba es un sensor inercial miniatura altamente robusto que proporciona balanceo (roll), cabeceo (pitch) y rumbo magnético gracias al filtro de Kalman extendido (EKF) integrado.
El AHRS está extensamente calibrado en temperatura y dinámica para sesgos, desalineaciones, etc. Dado que el espacio es limitado en una motocicleta para el equipo de pruebas, Ashish Samant, Director de Zen Microsystems, recomendó a su cliente el Ellipse-N, el INS/GNSS miniatura todo en uno de SBG Systems.
El Ellipse-N es un sistema de navegación inercial miniatura que integra un receptor GNSS L1 y fusiona la posición con datos inerciales para una trayectoria suave incluso durante interrupciones que podrían ocurrir cerca de árboles, edificios, etc.
Después de esta prueba exitosa, el cliente de Zen Microsystems eligió el Ellipse-N.


Ellipse-N
El Ellipse-N es un sistema de navegación inercial (INS) RTK compacto y de alto rendimiento con un receptor GNSS integrado de doble banda y cuatro constelaciones. Proporciona roll, pitch, heading y heave, así como una posición GNSS centimétrica.
El sensor Ellipse-N funciona mejor en entornos dinámicos y en condiciones GNSS adversas. Además, también funciona en aplicaciones de menor dinámica utilizando el heading magnético.

Solicite un presupuesto para el Ellipse-N
¿Tiene alguna pregunta?
¡Bienvenido a nuestra sección de preguntas frecuentes! Aquí encontrará respuestas a las preguntas más habituales sobre las aplicaciones que mostramos. Si no encuentra lo que busca, ¡no dude en ponerse en contacto con nosotros directamente!
¿Acepta el INS entradas de sensores de ayuda externos?
Los Sistemas de Navegación Inercial de nuestra empresa aceptan entradas de sensores de ayuda externos, como sensores de datos aéreos, magnetómetros, odómetros, DVL y otros.
Esta integración hace que el INS sea muy versátil y fiable, especialmente en entornos sin cobertura GNSS.
Estos sensores externos mejoran el rendimiento general y la precisión del INS al proporcionar datos complementarios.
¿Cuál es la diferencia entre IMU e INS?
La diferencia entre una unidad de medición inercial (IMU) y un sistema de navegación inercial (INS) radica en su funcionalidad y complejidad.
Una IMU unidad de medición inercial) proporciona datos brutos sobre la aceleración lineal y la velocidad angular del vehículo, medidos por acelerómetros y giroscopios. Proporciona información sobre el balanceo, el cabeceo, el guiñada y el movimiento, pero no calcula datos de posición ni de navegación. La IMU diseñada específicamente para transmitir datos esenciales sobre el movimiento y la orientación para su procesamiento externo con el fin de determinar la posición o la velocidad.
Por otro lado, un INS sistema de navegación inercial) combina IMU con algoritmos avanzados para calcular la posición, la velocidad y la orientación de un vehículo a lo largo del tiempo. Incorpora algoritmos de navegación como el filtrado de Kalman para la fusión e integración de sensores. Un INS datos de navegación en tiempo real, incluyendo posición, velocidad y orientación, sin depender de sistemas de posicionamiento externos como GNSS.
Este sistema de navegación se utiliza normalmente en aplicaciones que requieren soluciones de navegación completas, especialmente en entornos GNSS, como los UAV militares, los buques y los submarinos.
¿Qué es GNSS vs GPS?
GNSS significa Sistema Global de Navegación por Satélite y GPS para Sistema de Posicionamiento Global. Estos términos se utilizan a menudo indistintamente, pero se refieren a conceptos diferentes dentro de los sistemas de navegación por satélite.
GNSS es un término colectivo que engloba a todos los sistemas de navegación por satélite, mientras que GPS se refiere específicamente al sistema estadounidense. El GNSS incluye múltiples sistemas que proporcionan una cobertura global más completa, siendo GPS solo uno de ellos.
Se obtiene una mayor precisión y fiabilidad con GNSS, al integrar datos de múltiples sistemas, mientras que GPS por sí solo podría tener limitaciones dependiendo de la disponibilidad de satélites y las condiciones ambientales.
