Análise da aceleração de rolagem e inclinação de motocicletas
Velocidade da bicicleta, aceleração lateral e ângulo de inclinação (moto roll).
“Eles gostam do tamanho compacto do Ellipse-N e da impressionante robustez da posição, juntamente com o protocolo de comunicação CAN e a boa precisão, mesmo em condições de vibração.” | Ashish S., Diretor da Zen Microsystems

Teste de pneus
A qualidade e o desempenho dos pneus são componentes cruciais para o comportamento seguro e o conforto da bicicleta. Os fabricantes de veículos de duas rodas analisam atentamente o desempenho dos pneus ao selecionar seus fornecedores.
Uma empresa indiana fabricante de pneus contatou a Zen Microsystems para testar a boa aderência de seus pneus, bem como as capacidades de curva em comparação com os pneus líderes de mercado.
A Zen Microsystems é uma renomada distribuidora indiana de equipamentos de teste. A empresa entregou uma análise completa dos pneus usando o Ellipse-A Attitude and Heading Reference System (AHRS) da SBG Systems.
Resultados dos testes
O teste ocorreu em um circuito de direção. A equipe da Zen Microsystems instalou o Ellipse-A conectado a um registrador de dados CAN com receptor GPS integrado.
A moto foi equipada com pneus de clientes Zen e, em seguida, com os pneus líderes de mercado para análise comparativa. Para ambos os testes, o mesmo equipamento de teste foi usado para detectar a velocidade, a aceleração lateral e o ângulo de inclinação da moto (rolagem da moto).
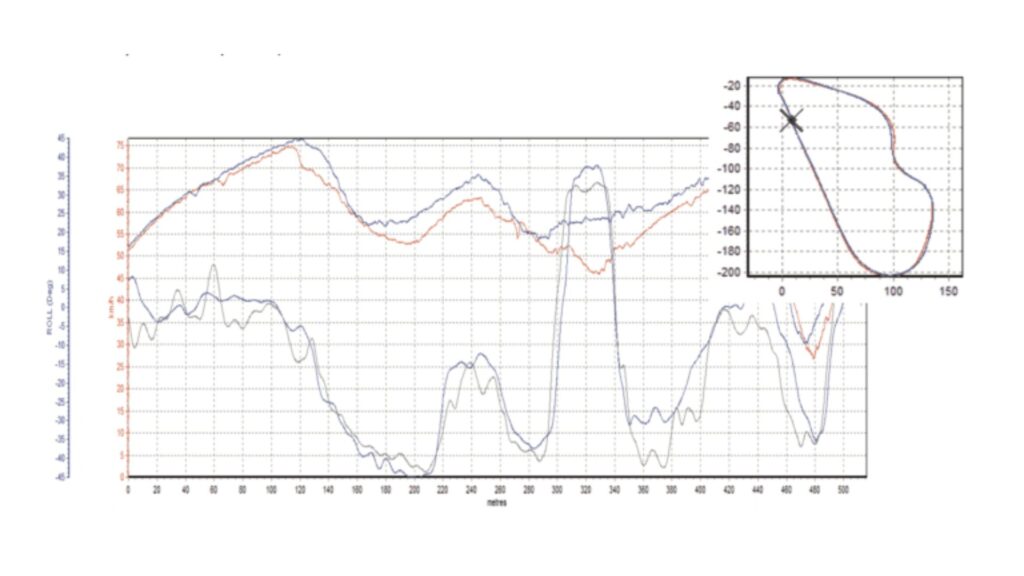
A análise mostrou que na mesma curva (cotovelo), com maior velocidade, os pneus do cliente da Zen Microsystems permitiram maior rolagem da moto durante as curvas, mais acelerações laterais, o que significa uma maior aderência dos pneus à estrada (maior aderência à estrada).
AHRS vs INS com receptor GNSS integrado
Esta análise completa foi determinante para o cliente, que pôde comprovar a alta qualidade de seus produtos ao fabricante de veículos de duas rodas.
O Ellipse-A AHRS utilizado para o teste é um sensor inercial miniatura altamente robusto que fornece roll, pitch e rumo magnético graças ao Filtro de Kalman Estendido (EKF) embarcado.
O AHRS é extensivamente calibrado em temperatura e dinâmica para bias, desalinhamento, etc. Como o espaço é limitado em uma moto para equipamentos de teste, Ashish Samant, Diretor da Zen Microsystems, recomendou ao seu cliente o Ellipse-N, o INS/GNSS miniatura all-in-one da SBG Systems.
O Ellipse-N é um sistema de navegação inercial miniatura que integra um receptor GNSS L1 e funde a posição com dados inerciais para uma trajetória suave mesmo durante interrupções que podem ocorrer perto de árvores, edifícios, etc.
Após este teste bem-sucedido, o cliente da Zen Microsystems escolheu o Ellipse-N.


Ellipse-N
O Ellipse-N é um Sistema de Navegação Inercial (INS) RTK compacto e de alto desempenho com um receptor GNSS de banda dupla e quatro constelações integrado. Ele fornece roll, pitch, heading e heave, bem como uma posição GNSS centimétrica.
O sensor Ellipse-N tem o melhor desempenho em ambientes dinâmicos e condições GNSS adversas. Além disso, ele também opera em aplicações dinâmicas mais baixas usando heading magnético.

Solicite uma cotação para o Ellipse-N
Você tem perguntas?
Bem-vindo à nossa seção de FAQ! Aqui, você encontrará respostas para as perguntas mais comuns sobre as aplicações que apresentamos. Se você não encontrar o que procura, sinta-se à vontade para nos contatar diretamente!
O INS aceita entradas de sensores auxiliares externos?
Os Sistemas de Navegação Inercial da nossa empresa aceitam entradas de sensores auxiliares externos, como sensores de dados aéreos, magnetômetros, odômetros, DVL e outros.
Essa integração torna o INS altamente versátil e confiável, especialmente em ambientes com GNSS negado.
Esses sensores externos melhoram o desempenho geral e a precisão do INS, fornecendo dados complementares.
Qual é a diferença entre IMU e INS?
A diferença entre uma Unidade de Medição Inercial (IMU) e um Sistema de Navegação Inercial (INS) reside em sua funcionalidade e complexidade.
Uma IMU unidade de medição inercial) fornece dados brutos sobre a aceleração linear e a velocidade angular do veículo, medidos por acelerômetros e giroscópios. Ela fornece informações sobre rotação, inclinação, guinada e movimento, mas não calcula dados de posição ou navegação. A IMU projetada especificamente para transmitir dados essenciais sobre movimento e orientação para processamento externo, a fim de determinar a posição ou a velocidade.
Por outro lado, um INS sistema de navegação inercial) combina IMU com algoritmos avançados para calcular a posição, a velocidade e a orientação de um veículo ao longo do tempo. Ele incorpora algoritmos de navegação, como a filtragem de Kalman, para fusão e integração de sensores. Um INS dados de navegação em tempo real, incluindo posição, velocidade e orientação, sem depender de sistemas de posicionamento externos, como GNSS.
Esse sistema de navegação é normalmente utilizado em aplicações que exigem soluções de navegação abrangentes, particularmente em ambientes GNSS, como UAVs militares, navios e submarinos.
O que é GNSS vs GPS?
GNSS significa Global Navigation Satellite System e GPS para Global Positioning System. Esses termos são frequentemente usados de forma intercambiável, mas se referem a conceitos distintos dentro dos sistemas de navegação baseados em satélite.
GNSS é um termo coletivo para todos os sistemas de navegação por satélite, enquanto o GPS se refere especificamente ao sistema dos EUA. Ele abrange múltiplos sistemas que fornecem uma cobertura global mais abrangente, enquanto o GPS é apenas um desses sistemas.
Você obtém maior precisão e confiabilidade com o GNSS, integrando dados de vários sistemas, enquanto o GPS sozinho pode ter limitações dependendo da disponibilidade de satélites e das condições ambientais.
