Analyse de l'accélération de roulis et d'inclinaison des motos
Vitesse de la moto, accélération latérale et angle d'inclinaison (roulis de la moto).
« Ils apprécient la taille compacte de l'Ellipse-N et la robustesse impressionnante de la position, associée au protocole de communication CAN et à la bonne précision, même dans des conditions de vibrations. » | Ashish S., Directeur de Zen Microsystems

Test de pneus
La qualité et les performances des pneus sont des éléments essentiels de la sécurité et du confort du vélo. Les fabricants de deux-roues examinent attentivement les performances des pneus lorsqu'ils sélectionnent leurs fournisseurs.
Une entreprise indienne de fabrication de pneus a contacté Zen Microsystems pour tester la bonne adhérence de ses pneus ainsi que les capacités en virage par rapport aux pneus des leaders du marché.
Zen Microsystems est un distributeur indien renommé d'équipements de test. L'entreprise a fourni une analyse complète des pneus à l'aide du système de référence d'attitude et de cap (AHRS) Ellipse-A de SBG Systems.
Résultats des tests
Le test a eu lieu sur un circuit automobile. L'équipe de Zen Microsystems a installé l'Ellipse-A, connecté à un enregistreur de données CAN avec récepteur GPS intégré.
La moto était équipée de pneus Zen du client, puis de pneus du leader du marché pour une analyse comparative. Pour les deux tests, le même équipement de test a été utilisé pour détecter la vitesse, l'accélération latérale et l'angle d'inclinaison de la moto (roulis de la moto).
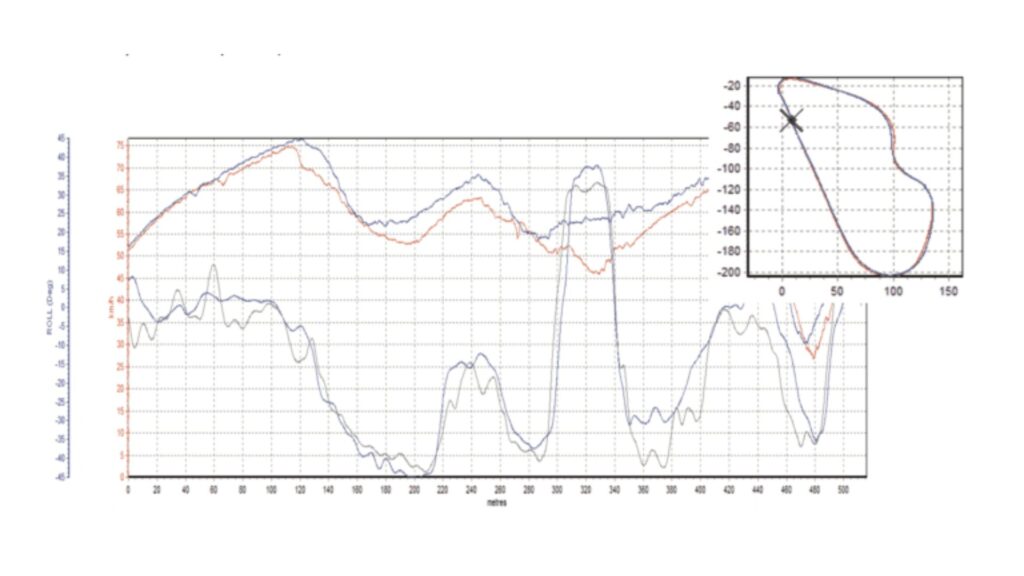
L'analyse a montré que dans la même courbe (virage), avec une vitesse plus élevée, les pneus du client de Zen Microsystems permettaient un roulis plus important de la moto pendant les virages, plus d'accélérations latérales, ce qui signifie une plus grande adhérence des pneus à la route (adhérence plus élevée).
AHRS vs INS avec récepteur GNSS intégré
Cette analyse complète a été déterminante pour le client qui a pu prouver la haute qualité de ses produits au fabricant de deux-roues.
L'Ellipse-A AHRS utilisé pour le test est un capteur inertiel miniature très robuste qui fournit le roulis, le tangage et le cap magnétique grâce au Filtrage de Kalman Étendu (EKF) embarqué.
L'AHRS est calibré de manière exhaustive en température et en dynamique pour le biais, le désalignement, etc. Comme l'espace est limité sur une moto pour l'équipement de test, Ashish Samant, Directeur de Zen Microsystems, a recommandé à son client l'Ellipse-N, l'INS/GNSS miniature tout-en-un de SBG Systems.
L'Ellipse-N est un système de navigation inertielle miniature qui intègre un récepteur GNSS L1 et fusionne la position avec les données inertielles pour une trajectoire fluide, même pendant les coupures qui pourraient survenir près des arbres, des bâtiments, etc.
Après ce test réussi, le client de Zen Microsystems a choisi l'Ellipse-N.


Ellipse-N
Ellipse-N est un système de navigation inertielle (INS) RTK compact et performant avec un récepteur GNSS double bande et quatre constellations intégré. Il fournit le roulis, le tangage, le cap et le pilonnement, ainsi qu'une position GNSS centimétrique.
Le capteur Ellipse-N fonctionne mieux dans les environnements dynamiques et les conditions GNSS difficiles. De plus, il fonctionne également dans des applications moins dynamiques en utilisant le cap magnétique.

Demander un devis pour l'Ellipse-N
Vous avez des questions ?
Bienvenue dans notre section FAQ ! Vous trouverez ici les réponses aux questions les plus courantes sur les applications que nous présentons. Si vous ne trouvez pas ce que vous cherchez, n'hésitez pas à nous contacter directement !
L'INS accepte-t-il les entrées de capteurs d'aide externes ?
Les systèmes de navigation inertielle de notre société acceptent les entrées de capteurs d'aide externes, tels que les capteurs de données aériennes, les magnétomètres, les odomètres, le DVL et autres.
Cette intégration rend l'INS très polyvalent et fiable, en particulier dans les environnements où le GNSS est inaccessible.
Ces capteurs externes améliorent les performances globales et la précision de l'INS en fournissant des données complémentaires.
Quelle est la différence entre une IMU et un INS ?
La différence entre une unité de mesure inertielle (IMU) et un système de navigation inertielle (INS) réside dans leur fonctionnalité et leur complexité.
Une IMU unité de mesure inertielle) fournit des données brutes sur l’accélération linéaire et la vitesse angulaire du véhicule, mesurées par des accéléromètres et des gyroscopes. Elle fournit des informations sur le roulis, le tangage, le lacet et le mouvement, mais ne calcule pas les données de position ou de navigation. IMU spécifiquement conçue pour transmettre des données essentielles sur le mouvement et l’orientation en vue d’un traitement externe permettant de déterminer la position ou la vitesse.
D’autre part, un INS système de navigation inertielle) combine IMU avec des algorithmes avancés pour calculer la position, la vitesse et l'orientation d'un véhicule au fil du temps. Il intègre des algorithmes de navigation tels que le filtrage de Kalman pour la fusion et l'intégration des capteurs. Un INS des données de navigation en temps réel, notamment la position, la vitesse et l'orientation, sans dépendre de systèmes de positionnement externes tels que GNSS.
Ce système de navigation est généralement utilisé dans des applications nécessitant des solutions de navigation complètes, en particulier dans des environnements GNSS, comme les drones militaires, les navires et les sous-marins.
Quelle est la différence entre GNSS et GPS ?
Le GNSS signifie Système Mondial de Navigation par Satellite et le GPS signifie Système de Positionnement Global. Ces termes sont souvent employés indifféremment, mais ils désignent des concepts distincts au sein des systèmes de navigation par satellite.
Le GNSS est un terme générique désignant l'ensemble des systèmes de navigation par satellite, tandis que le GPS fait spécifiquement référence au système américain. Il inclut plusieurs systèmes qui offrent une couverture mondiale plus complète, alors que le GPS n'est qu'un de ces systèmes.
Vous bénéficiez d'une précision et d'une fiabilité accrues avec GNSS, en intégrant les données de plusieurs systèmes, alors que GPS seul peut avoir des limitations en fonction de la disponibilité des satellites et des conditions environnementales.
