Analisi dell'accelerazione di rollio e beccheggio per motocicli
Velocità della moto, accelerazione laterale e angolo di inclinazione (rollio della moto).
“Apprezzano le dimensioni compatte dell'Ellipse-N e l'impressionante robustezza della posizione, abbinata al protocollo di comunicazione CAN e alla buona precisione anche in condizioni di vibrazione.” | Ashish S., Direttore di Zen Microsystems

Test degli pneumatici
La qualità e le prestazioni degli pneumatici sono componenti cruciali per la sicurezza e il comfort della bicicletta. I produttori di veicoli a due ruote esaminano attentamente le prestazioni degli pneumatici quando selezionano i loro fornitori.
Un'azienda produttrice di pneumatici indiana ha contattato Zen Microsystems per testare la buona aderenza dei propri pneumatici, nonché le capacità in curva rispetto agli pneumatici leader di mercato.
Zen Microsystems è un rinomato distributore indiano di apparecchiature di collaudo. L'azienda ha fornito un'analisi completa degli pneumatici utilizzando il sistema di riferimento di assetto e direzione (AHRS) Ellipse-A di SBG Systems.
Risultati dei test
Il test si è svolto su un circuito di guida. Il team di Zen Microsystems ha installato l'Ellipse-A collegato a un data logger CAN con ricevitore GPS integrato.
La moto era equipaggiata con pneumatici del cliente Zen e poi con pneumatici leader di mercato per l'analisi comparativa. Per entrambi i test, è stata utilizzata la stessa attrezzatura di prova per rilevare la velocità, l'accelerazione laterale e l'angolo di inclinazione della moto (rollio della moto).
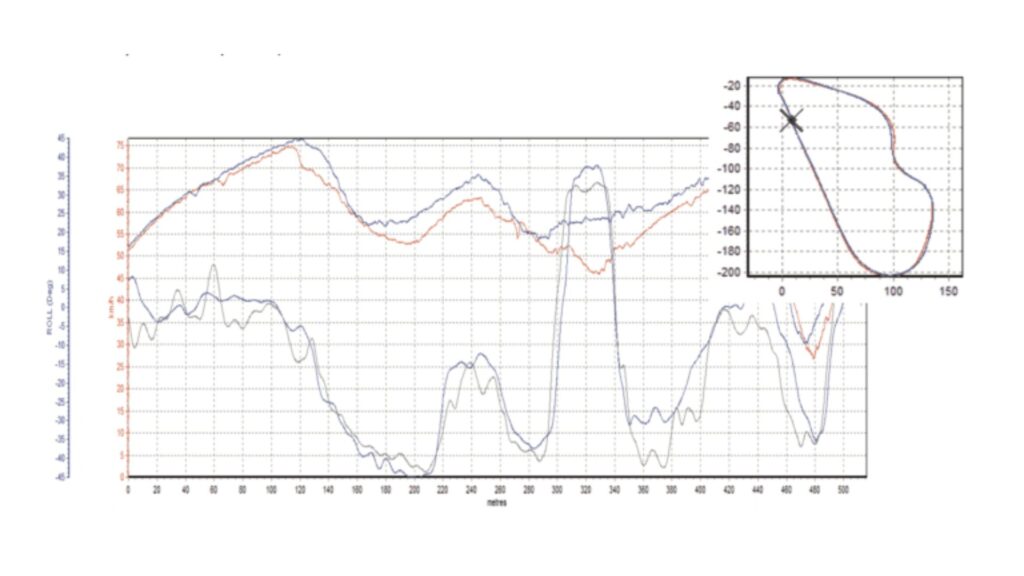
L'analisi ha evidenziato che, a parità di curva (flessione), a velocità più elevate, gli pneumatici del cliente di Zen Microsystems consentivano un maggiore rollio della moto durante le curve, maggiori accelerazioni laterali, il che significa una maggiore aderenza degli pneumatici alla strada (maggiore aderenza stradale).
AHRS vs INS con ricevitore GNSS integrato
Questa analisi completa è stata determinante per il cliente, che ha potuto dimostrare l'alta qualità dei suoi prodotti al produttore di veicoli a due ruote.
L'Ellipse-A AHRS utilizzato per il test è un sensore inerziale miniaturizzato altamente robusto che fornisce rollio, beccheggio e rotta magnetica grazie al filtro di Kalman esteso (EKF) integrato.
L'AHRS è ampiamente calibrato in temperatura e dinamica per bias, disallineamento, ecc. Dato che lo spazio è limitato su una moto per l'attrezzatura di test, Ashish Samant, Direttore di Zen Microsystems, ha raccomandato al suo cliente l'Ellipse-N, l'INS/GNSS miniaturizzato all-in-one di SBG Systems.
L'Ellipse-N è un sistema di navigazione inerziale miniaturizzato che integra un ricevitore GNSS L1 e fonde la posizione con i dati inerziali per una traiettoria fluida anche durante le interruzioni che potrebbero verificarsi vicino ad alberi, edifici, ecc.
Dopo questo test di successo, il cliente di Zen Microsystems ha scelto l'Ellipse-N.


Ellipse-N
Ellipse-N è un sistema di navigazione inerziale RTK (INS) compatto e ad alte prestazioni con un ricevitore GNSS integrato Dual band, Quad Constellations. Fornisce rollio, beccheggio, direzione e heave, nonché una posizione GNSS centimetrica.
Il sensore Ellipse-N offre prestazioni ottimali in ambienti dinamici e in condizioni GNSS difficili. Inoltre, funziona anche in applicazioni meno dinamiche utilizzando la direzione magnetica.

Richiedi un preventivo per Ellipse-N
Ha delle domande?
Benvenuti nella nostra sezione FAQ! Qui troverete le risposte alle domande più comuni sulle applicazioni che presentiamo. Se non trovate quello che state cercando, non esitate a contattarci direttamente!
L'INS accetta input da sensori di ausilio esterni?
I sistemi di navigazione inerziale della nostra azienda accettano input da sensori di ausilio esterni, come sensori di dati aerei, magnetometri, odometri, DVL e altri.
Questa integrazione rende l'INS altamente versatile e affidabile, specialmente in ambienti privi di GNSS.
Questi sensori esterni migliorano le prestazioni complessive e la precisione dell'INS fornendo dati complementari.
Qual è la differenza tra IMU e INS?
La differenza tra un'unità di misura inerziale (IMU) e un sistema di navigazione inerziale (INS) risiede nella loro funzionalità e complessità.
IMU unità di misura inerziale) fornisce dati grezzi sull'accelerazione lineare e sulla velocità angolare del veicolo, misurati da accelerometri e giroscopi. Fornisce informazioni su rollio, beccheggio, imbardata e movimento, ma non calcola la posizione né i dati di navigazione. IMU progettata specificamente per trasmettere dati essenziali sul movimento e sull'orientamento affinché vengano elaborati esternamente per determinare la posizione o la velocità.
D'altra parte, un INS sistema di navigazione inerziale) combina IMU con algoritmi avanzati per calcolare la posizione, la velocità e l'orientamento di un veicolo nel tempo. Incorpora algoritmi di navigazione come il filtro di Kalman per la fusione e l'integrazione dei sensori. Un INS dati di navigazione in tempo reale, tra cui posizione, velocità e orientamento, senza fare affidamento su sistemi di posizionamento esterni come GNSS.
Questo sistema di navigazione viene tipicamente utilizzato in applicazioni che richiedono soluzioni di navigazione complete, in particolare in ambienti GNSS, come UAV militari, navi e sottomarini.
Cos'è GNSS rispetto a GPS?
GNSS sta per Global Navigation Satellite System e GPS per Global Positioning System. Questi termini sono spesso usati in modo intercambiabile, ma si riferiscono a concetti diversi all'interno dei sistemi di navigazione satellitare.
GNSS è un termine collettivo per tutti i sistemi di navigazione satellitare, mentre il GPS si riferisce specificamente al sistema statunitense. Include diversi sistemi che forniscono una copertura globale più completa, mentre il GPS è solo uno di questi sistemi.
Si ottiene una maggiore accuratezza e affidabilità con GNSS, integrando i dati provenienti da più sistemi, mentre il solo GPS potrebbe avere delle limitazioni a seconda della disponibilità dei satelliti e delle condizioni ambientali.
