Analiza przechyłów i przyspieszeń motocykli
Prędkość motocykla, przyspieszenie boczne i kąt pochylenia (moto roll).
„Podoba im się kompaktowy rozmiar Ellipse-N i imponująca niezawodność pozycji w połączeniu z protokołem komunikacji CAN i dobrą precyzją nawet w warunkach wibracji.” | Ashish S., Dyrektor Zen Microsystems

Testowanie opon
Jakość i wydajność opon są kluczowymi elementami bezpiecznego zachowania i komfortu jazdy. Producenci pojazdów dwukołowych przyglądają się uważnie osiągom opon przy wyborze dostawców.
Indyjska firma produkująca opony skontaktowała się z Zen Microsystems w celu przetestowania dobrej przyczepności ich opon, a także zdolności pokonywania zakrętów w porównaniu z oponami lidera rynku.
Zen Microsystems to renomowany indyjski dystrybutor sprzętu testującego. Firma dostarczyła pełną analizę opon przy użyciu Attitude and Heading Reference System (AHRS) Ellipse-A firmy SBG Systems.
Wyniki testów
Test przeprowadzono na torze testowym. Zespół Zen Microsystems zainstalował Ellipse-A podłączony do data logger CAN z wbudowanym odbiornikiem GPS.
Motocykl został wyposażony w opony klienta Zen, a następnie w opony lidera rynku w celu analizy porównawczej. W obu testach użyto tego samego sprzętu testującego do pomiaru prędkości, przyspieszenia bocznego i kąta pochylenia motocykla (przechyłu motocykla).
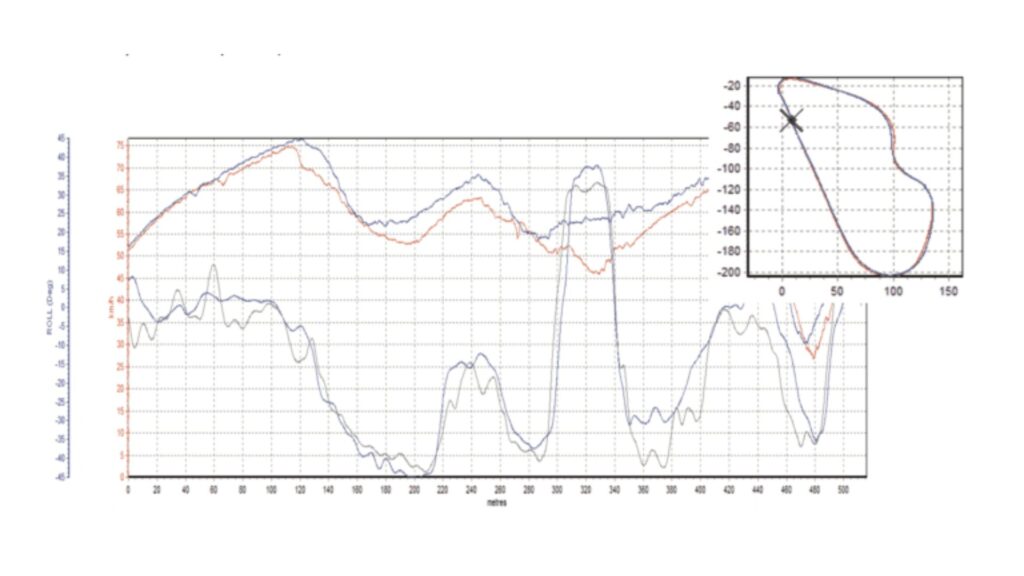
Analiza wykazała, że na tym samym zakręcie, przy większej prędkości, opony klienta Zen Microsystems pozwalały na większy przechył motocykla podczas zakrętów, większe przyspieszenia boczne, co oznacza większą przyczepność opon do drogi (większa przyczepność do drogi).
AHRS vs INS z wbudowanym odbiornikiem GNSS
Ta kompletna analiza była decydująca dla klienta, który mógł udowodnić wysoką jakość swoich produktów producentowi pojazdów dwukołowych.
Użyty do testu Ellipse-A AHRS to wysoce wytrzymały, miniaturowy czujnik inercyjny, który dostarcza dane o roll, pitch i heading magnetycznym dzięki wbudowanemu filtrowi Extended Kalman Filtering (EKF).
AHRS jest kompleksowo kalibrowany pod względem temperatury i dynamiki, uwzględniając odchylenia, niewspółosiowość itp. Ponieważ przestrzeń na rowerze do testowania sprzętu jest ograniczona, Ashish Samant, dyrektor Zen Microsystems, polecił swojemu klientowi Ellipse-N, miniaturowy, uniwersalny INS/GNSS firmy SBG Systems.
Ellipse-N to miniaturowy system nawigacji inercyjnej, który integruje odbiornik GNSS L1 i łączy pozycję z danymi inercyjnymi, zapewniając płynną trajektorię nawet podczas przerw w dostępie do sygnału, które mogą wystąpić w pobliżu drzew, budynków itp.
Po tym udanym teście klient Zen Microsystems wybrał Ellipse-N.


Ellipse-N
Ellipse-N to kompaktowy i wydajny system nawigacji inercyjnej RTK (INS) z zintegrowanym dwupasmowym odbiornikiem GNSS obsługującym cztery konstelacje. Zapewnia on pomiar roll, pitch, heading i heave, a także centymetrową dokładność pozycji GNSS.
Czujnik Ellipse-N najlepiej sprawdza się w dynamicznych środowiskach i trudnych warunkach odbioru sygnału GNSS. Ponadto, może on również pracować w aplikacjach o mniejszej dynamice, wykorzystując heading magnetyczny.

Zapytaj o wycenę dla Ellipse-N
Masz pytania?
Witamy w naszej sekcji FAQ! Znajdziesz tutaj odpowiedzi na najczęściej zadawane pytania dotyczące prezentowanych przez nas aplikacji. Jeśli nie znajdziesz tego, czego szukasz, skontaktuj się z nami bezpośrednio!
Czy INS akceptuje dane wejściowe z zewnętrznych czujników wspomagających?
Inercyjne systemy nawigacyjne z naszej firmy akceptują dane wejściowe z zewnętrznych czujników wspomagających, takich jak czujniki danych lotniczych, magnetometry, odometry, DVL i inne.
Ta integracja sprawia, że INS jest wysoce wszechstronny i niezawodny, szczególnie w środowiskach, gdzie sygnał GNSS jest niedostępny.
Te zewnętrzne czujniki poprawiają ogólną wydajność i dokładność INS, dostarczając uzupełniające się dane.
Jaka jest różnica między IMU a INS?
Różnica między inercyjnym zespołem pomiarowym (IMU) a inercyjnym systemem nawigacyjnym (INS) polega na ich funkcjonalności i złożoności.
IMU inercyjny moduł pomiarowy) dostarcza surowe dane dotyczące przyspieszenia liniowego i prędkości kątowej pojazdu, mierzone za pomocą akcelerometrów i żyroskopów. Dostarcza informacji o przechyłach, pochyleniach, odchyleniach i ruchu, ale nie oblicza danych dotyczących pozycji ani nawigacji. IMU specjalnie zaprojektowana przekazywania niezbędnych danych o ruchu i orientacji do zewnętrznego przetwarzania w celu określenia pozycji lub prędkości.
Z drugiej strony, INS inercyjny system nawigacyjny) łączy IMU z zaawansowanymi algorytmami w celu obliczenia pozycji, prędkości i orientacji pojazdu w czasie. Wykorzystuje algorytmy nawigacyjne, takie jak filtrowanie Kalmana, do fuzji i integracji danych z czujników. INS dane nawigacyjne w czasie rzeczywistym, w tym pozycję, prędkość i orientację, bez konieczności polegania na zewnętrznych systemach pozycjonowania, takich jak GNSS.
Ten system nawigacyjny jest zazwyczaj wykorzystywany w zastosowaniach wymagających kompleksowych rozwiązań nawigacyjnych, szczególnie w środowiskach GNSS, takich jak wojskowe bezzałogowe statki powietrzne (UAV), statki i okręty podwodne.
Co to jest GNSS a GPS?
GNSS oznacza Globalny System Nawigacji Satelitarnej, a GPS Globalny System Pozycjonowania. Terminy te są często używane zamiennie, ale odnoszą się do różnych koncepcji w ramach satelitarnych systemów nawigacyjnych.
GNSS to zbiorcze określenie wszystkich satelitarnych systemów nawigacyjnych, natomiast GPS odnosi się konkretnie do systemu amerykańskiego. Obejmuje wiele systemów, które zapewniają bardziej kompleksowy zasięg globalny, podczas gdy GPS jest tylko jednym z tych systemów.
Dzięki integracji danych z wielu systemów uzyskujesz lepszą dokładność i niezawodność dzięki GNSS, podczas gdy sam GPS może mieć ograniczenia w zależności od dostępności satelitów i warunków środowiskowych.
