オートバイのロール角とリーン角の加速分析
バイクの速度、横方向の加速度、リーン角(モトロール)。
「彼らは、Ellipse-Nのコンパクトなサイズと、CAN通信プロトコルと相まって、振動条件下でも優れた精度を備えた印象的な位置の堅牢性を気に入っています。」 | Zen Microsystems、ディレクター、Ashish S.

タイヤ試験
タイヤの品質と性能は、安全な自転車の挙動と快適さの重要な要素です。二輪車メーカーは、プロバイダーを選択する際にタイヤの性能を注意深く検討します。
あるインドのタイヤメーカーは、Zen Microsystems に、市場をリードするタイヤと比較して、自社のタイヤの良好な接着性とコーナリング性能をテストするように依頼しました。
Zen Microsystems は、試験装置の有名なインドの販売代理店です。同社は、SBG Systems の Ellipse-A 姿勢およびヘディング基準システム(AHRS)を使用して、完全なタイヤ分析を提供しました。
テスト結果
テストはドライブサーキットで行われました。Zen Microsystemsチームは、GPS受信機が組み込まれたCANデータロガーに接続されたEllipse-Aを設置しました。
バイクにはZenのお客様のタイヤが装着され、比較分析のために市場をリードするタイヤが装着されました。どちらのテストでも、速度、横方向の加速度、およびバイクのリーン角(バイクのロール)を感知するために、同じテスト装置が使用されました。
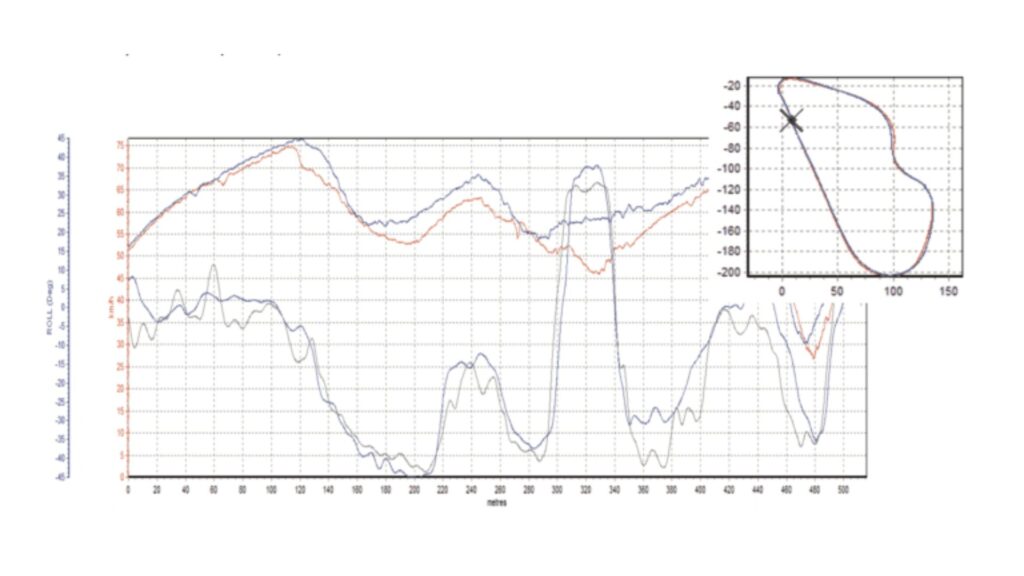
分析の結果、同じカーブ(ベンド)で、より高い速度で、Zen Microsystemsの顧客のタイヤは、ベンド中により高いバイクのロールを可能にし、より大きな横方向の加速度は、タイヤの路面へのより高い接着(より高い路面グリップ)を意味することがわかりました。
AHRSとGNSS受信機内蔵INSの比較
この詳細な分析は、二輪車メーカーに対し自社製品の高品質を証明できた顧客にとって、決定的な要因となりました。
テストに使用されたEllipse-A AHRSは、内蔵の拡張カルマンフィルター (EKF) により、ロール、ピッチ、磁気方位を提供する非常に堅牢な小型慣性センサーです。
AHRSは、バイアス、ミスアライメントなどについて、温度および動的環境下で広範囲に校正されています。テスト機器を搭載するバイク上のスペースが限られているため、Zen MicrosystemsのディレクターであるAshish Samant氏は、SBG Systems製のオールインワン小型INS/GNSSであるEllipse-Nを顧客に推奨しました。
Ellipse-Nは、L1 GNSS受信機を統合し、位置情報を慣性データと融合させる小型慣性航法システムであり、樹木や建物などの近くで発生する可能性のある測位中断中であってもスムーズな軌跡を実現します。
このテストの成功後、Zen Microsystemsの顧客はEllipse-Nを選択しました。


Ellipse-N
Ellipse-Nは、統合されたデュアルバンド、クワッドコンステレーションGNSS受信機を備えた、コンパクトで高性能なRTK慣性航法システム(INS)です。ロール、ピッチ、方位、およびヒーブ、ならびにセンチメートル精度のGNSS位置を提供します。
Ellipse-Nセンサーは、動的な環境や過酷なGNSS条件で最高の性能を発揮します。さらに、磁気方位を使用して、より低いダイナミックアプリケーションでも動作します。

Ellipse-Nの見積もりを依頼する
ご質問はありますか?
FAQセクションへようこそ!ここでは、ご紹介するアプリケーションに関する最も一般的な質問への回答をご覧いただけます。お探しの情報が見つからない場合は、お気軽にお問い合わせください。
INSは外部支援センサーからの入力を受け入れますか?
当社の慣性航法システムは、空気データセンサー、磁力計、走行距離計、DVL 外部補助センサーからの入力を受け付けます。
この統合により、特にGNSSが利用できない環境において、INSは非常に汎用性が高く信頼性の高いものになります。
これらの外部センサーは、補完的なデータを提供することにより、INSの全体的なパフォーマンスと精度を向上させます。
IMUとINSの違いは何ですか?
慣性計測ユニット(IMU)と慣性航法システム(INS)の違いは、その機能と複雑さにあります。
IMU 慣性計測装置)は、加速度計やジャイロスコープによって測定された、車両の直線加速度および角速度に関する生データを提供します。IMUは、ロール、ピッチ、ヨー、および運動に関する情報を提供しますが、位置や航法データを計算することはありません。IMU 、位置や速度を決定するための外部処理に向けて、運動や姿勢に関する必須データを中継するように特別にIMU 。
一方、INS 慣性航法システム)は IMU のデータと高度なアルゴリズムを組み合わせて、時間の経過に伴う車両の位置、速度、および姿勢を算出します。これには、センサーフュージョンや統合のためのカルマンフィルタリングなどのナビゲーションアルゴリズムが組み込まれています。INS 、GNSSのような外部測位システムに依存することなく、位置、速度、姿勢を含むリアルタイムのナビゲーションデータINS 。
このナビゲーションシステムは、特に軍事用UAV、船舶、潜水艦など、GNSS環境において、包括的なナビゲーションソリューションを必要とする用途で一般的に利用されています。
GNSS と GPS の違いとは?
GNSSはGlobal Navigation Satellite Systemの略であり、GPSはGlobal Positioning Systemの略です。これらの用語はしばしば混同して使用されますが、衛星測位システム内では異なる概念を指します。
GNSSは全ての衛星測位システムの総称であり、GPSは特に米国のシステムを指します。GNSSはより包括的なグローバルカバレッジを提供する複数のシステムを含みますが、GPSはそのシステムの一つに過ぎません。
GNSSを使用すると、複数のシステムからのデータを統合することで、精度と信頼性が向上します。GPS単独では、衛星の利用可能性や環境条件によっては制限がある場合があります。
