Analyse der Roll- und Neigungsbeschleunigung von Motorrädern
Fahrradgeschwindigkeit, Querbeschleunigung und Schräglagenwinkel (Moto Roll).
“Ihnen gefällt die kompakte Größe der Ellipse-N und die beeindruckende Positionsrobustheit in Verbindung mit dem CAN-Kommunikationsprotokoll und der guten Präzision auch unter Vibrationsbedingungen.” | Ashish S., Direktor von Zen Microsystems

Reifentests
Reifenqualität und -leistung sind entscheidende Komponenten für sicheres Fahrverhalten und Komfort. Zweiradhersteller achten bei der Auswahl ihrer Anbieter genau auf die Reifenleistung.
Ein indischer Reifenhersteller kontaktierte Zen Microsystems, um die gute Haftung seiner Reifen sowie die Kurvenfahrt im Vergleich zu den Reifen des Marktführers zu testen.
Zen Microsystems ist ein renommierter indischer Distributor für Testgeräte. Das Unternehmen lieferte eine vollständige Reifenauswertung mit dem Ellipse-A Attitude and Heading Reference System (AHRS) von SBG Systems.
Testergebnisse
Der Test fand auf einer Teststrecke statt. Das Team von Zen Microsystems installierte die Ellipse-A, die mit einem CAN-Datenlogger mit eingebettetem GPS-Empfänger verbunden war.
Das Motorrad wurde mit den Reifen des Zen-Kunden und zum Vergleich mit den Reifen des Marktführers ausgestattet. Für beide Tests wurde die gleiche Testausrüstung verwendet, um Geschwindigkeit, Querbeschleunigung und den Neigungswinkel des Motorrads (Bike Roll) zu erfassen.
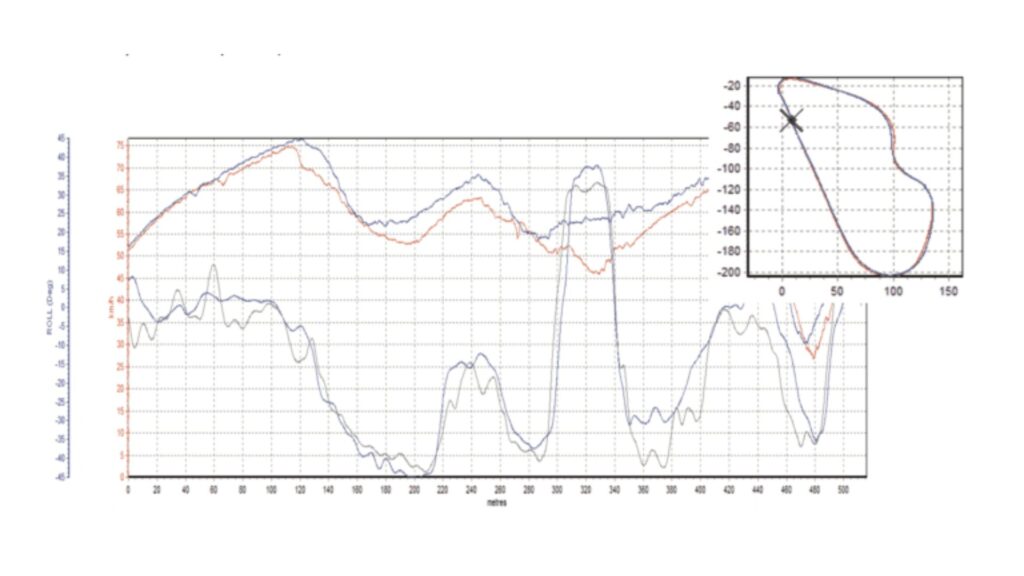
Die Analyse zeigte, dass bei gleicher Kurve und höherer Geschwindigkeit die Reifen des Kunden von Zen Microsystems eine höhere Bike Roll während der Kurvenfahrt und höhere Querbeschleunigungen ermöglichten, was eine höhere Haftung der Reifen auf der Straße bedeutet (höhere Straßenhaftung).
AHRS vs INS mit eingebettetem GNSS-Empfänger
Diese umfassende Analyse war ausschlaggebend für den Kunden, der die hohe Qualität seiner Produkte gegenüber dem Zweiradhersteller beweisen konnte.
Die für den Test verwendete Ellipse-A AHRS ist ein äußerst robuster miniaturisierter Inertialsensor, der Roll-, Nick- und magnetische Steuerkursdaten dank des integrierten Extended Kalman Filtering (EKF) liefert.
Die AHRS ist umfassend in Temperatur und Dynamik für Bias, Fehlausrichtung usw. kalibriert. Da der Platz auf einem Motorrad für Testgeräte begrenzt ist, empfahl Ashish Samant, Direktor von Zen Microsystems, seinem Kunden die Ellipse-N, das All-in-One-Miniatur-INS/GNSS von SBG Systems.
Die Ellipse-N ist ein miniaturisiertes inertiales Navigationssystem, das einen L1 GNSS-Empfänger integriert und die Position mit Inertialdaten für eine glatte Trajektorie fusioniert, selbst bei Ausfällen, die in der Nähe von Bäumen, Gebäuden usw. auftreten könnten.
Nach diesem erfolgreichen Test entschied sich der Kunde von Zen Microsystems für die Ellipse-N.


Ellipse-N
Ellipse-N ist ein kompaktes und leistungsstarkes RTK Inertial Navigation System (INS) mit einem integrierten Dualband-Quad-Konstellations-GNSS-Empfänger. Es bietet Roll-, Nick-, Kurs- und Heave-Daten sowie eine zentimetergenaue GNSS-Position.
Der Ellipse-N Sensor funktioniert am besten in dynamischen Umgebungen und unter schwierigen GNSS-Bedingungen. Darüber hinaus kann er auch in Anwendungen mit geringerer Dynamik mit magnetischer Kurssteuerung betrieben werden.

Fordern Sie ein Angebot für Ellipse-N an
Haben Sie Fragen?
Willkommen in unserem FAQ-Bereich! Hier finden Sie Antworten auf die häufigsten Fragen zu den von uns vorgestellten Anwendungen. Wenn Sie nicht finden, was Sie suchen, können Sie sich gerne direkt an uns wenden!
Akzeptiert das INS Eingaben von externen Hilfssensoren?
Inertiale Navigationssysteme unseres Unternehmens akzeptieren Eingaben von externen Hilfssensoren wie Luftdatensensoren, Magnetometern, Odometern, DVL und anderen.
Diese Integration macht das INS äußerst vielseitig und zuverlässig, insbesondere in GNSS-abgelehnten Umgebungen.
Diese externen Sensoren verbessern die Gesamtleistung und Genauigkeit des INS, indem sie ergänzende Daten liefern.
Was ist der Unterschied zwischen IMU und INS?
Der Unterschied zwischen einer Trägheitsmesseinheit (IMU) und einem Trägheitsnavigationssystem (INS) liegt in ihrer Funktionalität und Komplexität.
Eine IMU Inertial Measurement Unit) liefert Rohdaten zur linearen Beschleunigung und Winkelgeschwindigkeit des Fahrzeugs, die von Beschleunigungssensoren und Gyroskopen gemessen werden. Sie liefert Informationen zu Roll-, Nick- und Gierbewegung sowie zur Gesamtbewegung, berechnet jedoch keine Positions- oder Navigationsdaten. Die IMU speziell darauf ausgelegt, wesentliche Daten zu Bewegung und Ausrichtung zur externen Verarbeitung weiterzuleiten, um Position oder Geschwindigkeit zu bestimmen.
Ein INS Inertial Navigation System) hingegen kombiniert IMU -Daten mit fortschrittlichen Algorithmen, um die Position, Geschwindigkeit und Ausrichtung eines Fahrzeugs im Zeitverlauf zu berechnen. Es nutzt Navigationsalgorithmen wie Kalman-Filterung für die Sensorfusion und -integration. Ein INS Echtzeit-Navigationsdaten, einschließlich Position, Geschwindigkeit und Ausrichtung, ohne auf externe Ortungssysteme wie GNSS angewiesen zu sein.
Dieses Navigationssystem wird typischerweise in Anwendungen eingesetzt, die umfassende Navigationslösungen erfordern, insbesondere in Umgebungen GNSS, wie z. B. bei militärischen UAVs, Schiffen und U-Booten.
Was ist GNSS vs. GPS?
GNSS steht für Global Navigation Satellite System und GPS für Global Positioning System. Diese Begriffe werden oft synonym verwendet, aber sie beziehen sich auf unterschiedliche Konzepte innerhalb satellitengestützter Navigationssysteme.
GNSS ist ein Sammelbegriff für alle Satellitennavigationssysteme, während GPS sich speziell auf das US-amerikanische System bezieht. GNSS umfasst mehrere Systeme, die eine umfassendere globale Abdeckung bieten, wobei GPS nur eines dieser Systeme ist.
Durch die Integration von Daten aus mehreren Systemen erhalten Sie mit GNSS eine verbesserte Genauigkeit und Zuverlässigkeit, während GPS allein je nach Satellitenverfügbarkeit und Umgebungsbedingungen Einschränkungen aufweisen kann.
