
En este primer artículo de nuestra serie “Mastering Accuracy”, exploraremos los Sistemas Globales de Navegación por Satélite (GNSS) y sus precisiones autónomas teniendo en cuenta el GNSS y sus fuentes de error
¿Qué es un sistema GNSS?
Los sistemas de posicionamiento basados en satélites, como el GPS, se han vuelto omnipresentes y nos guían en nuestros viajes en coche y en nuestras caminatas. También desempeñan un papel fundamental en diversas aplicaciones tan diversas como los vehículos autónomos, la agricultura y la topografía.
Sin embargo, es importante pasar del término “GPS” al más inclusivo “GNSS” (Sistema Global de Navegación por Satélite), que engloba todas las constelaciones de satélites más allá de solo el GPS.
Hay cuatro constelaciones de satélites globales en funcionamiento (GPS, GLONASS, GALILEO, BEIDOU). Además, existen constelaciones suplementarias que sirven a regiones locales, como el IRNSS de la India, o complementan a las globales, como el QZSS de Japón.
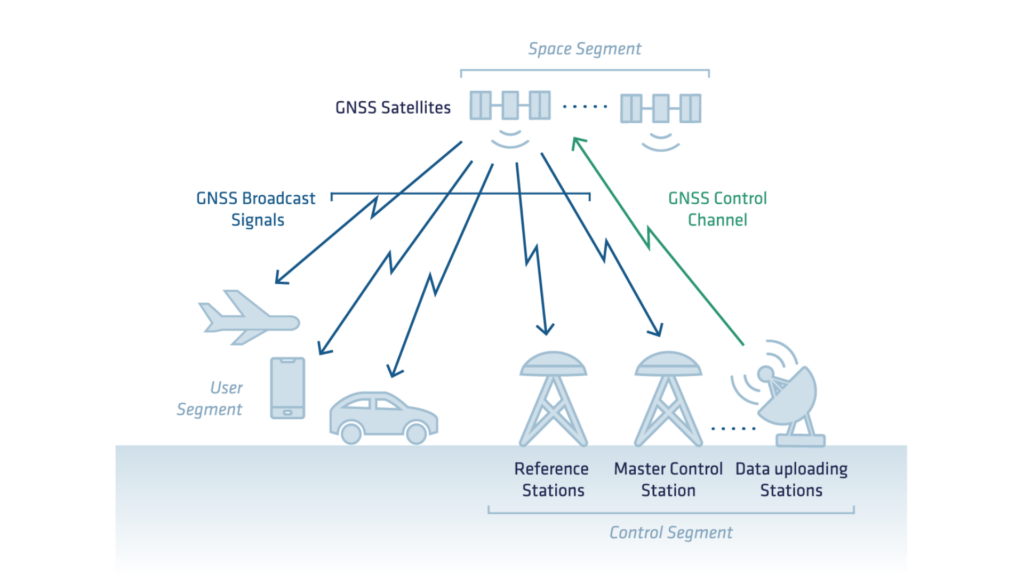
Aparte de los satélites, un sistema GNSS consta de otros segmentos esenciales:
- El segmento de satélites, que comprende la constelación de satélites.
- El segmento de control, compuesto por estaciones de control en tierra y equipos. Estos son responsables de monitorizar las constelaciones, determinar la posición de los satélites y asegurar su funcionamiento continuo y correcto.
- El segmento de usuario, que implica el equipo utilizado para calcular una posición basada en las señales recibidas de los satélites.
Principio fundamental del GNSS: Trilateración
El GNSS determina la posición y la hora de un receptor mediante trilateración, utilizando señales de múltiples satélites.
Para calcular una posición, el sistema debe resolver cuatro variables: latitud, longitud, altitud y tiempo. Este proceso requiere al menos cuatro satélites, aunque los satélites adicionales mejoran la precisión y la fiabilidad.
La siguiente imagen ilustra cómo funciona la trilateración. Cada satélite define una esfera a su alrededor, que representa las posibles distancias al receptor.
Un segundo satélite reduce las posibles soluciones a la intersección de estas dos esferas. Un tercer satélite refina aún más la solución, permitiendo al sistema determinar una ubicación única. En aplicaciones reales, el sistema también debe tener en cuenta el tiempo, lo que requiere un cuarto satélite.
Señal emitida por los satélites
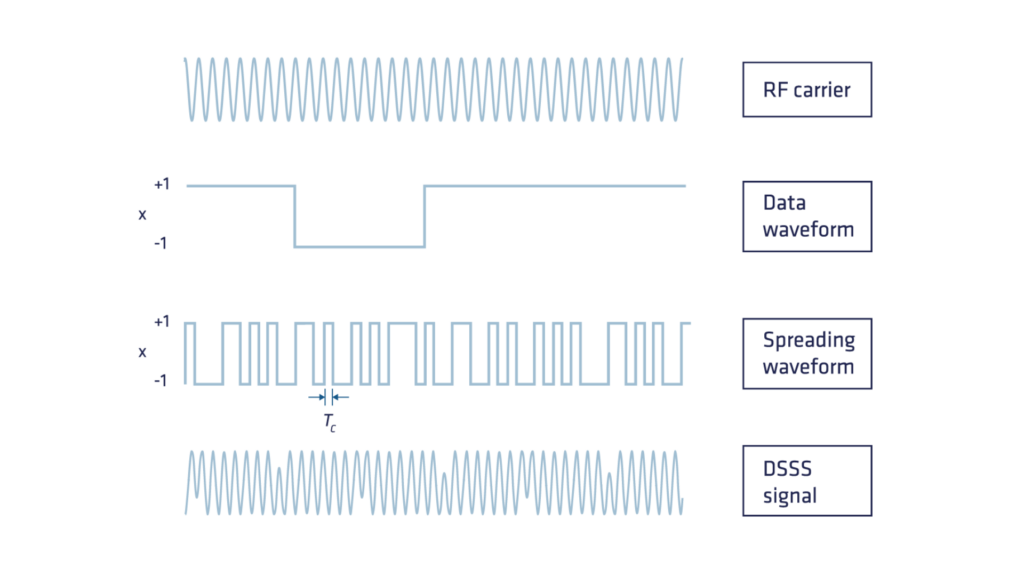
Los satélites GNSS transmiten señales a través de varias bandas de frecuencia, como L1, L2, L5, entre otras. Hay tres componentes básicos de las señales GNSS:
- Datos de navegación (baja frecuencia): calculados por el segmento de control, estos datos incluyen información esencial como los datos de efemérides (parámetros orbitales keplerianos necesarios para calcular las posiciones de los satélites), los datos de corrección del reloj y la información complementaria. Se cargan en el satélite y se transmiten globalmente a los receptores GNSS.
- Código de ruido pseudoaleatorio o código PRN: Cada satélite transmite un código de ruido pseudoaleatorio (PRN) único, una secuencia determinista de alta frecuencia de 0s y 1s diseñada con un patrón predecible para que el receptor pueda replicarla. La ventaja clave de añadir el código PRN es que permite a múltiples satélites transmitir señales en la misma frecuencia simultáneamente y ser reconocibles por el receptor. Esta técnica, conocida como Acceso Múltiple por División de Código (CDMA), asigna a cada satélite un código pseudoaleatorio único. Solo Glonass utiliza FDMA (Acceso Múltiple por División de Frecuencia), donde cada satélite tiene una frecuencia ligeramente diferente.
- Onda portadora de RF: una señal sinusoidal diseñada originalmente para transportar la señal combinada de los datos de navegación y el código PRN. Más adelante veremos cómo este componente evoluciona hasta convertirse en la base de la señal GNSS, permitiendo una precisión de posicionamiento a nivel de centímetros.
Medición de la distancia al satélite: código y fase portadora
Originalmente, el sistema GPS fue diseñado para que el receptor utilizara una réplica del código PRN y técnicas de autocorrelación para calcular el rango satélite-receptor con una precisión submétrica. Sin embargo, la onda portadora, inicialmente destinada a la transmisión del código PRN, demostró ser un activo valioso.
La medición de la fase de la portadora, aunque más precisa, introdujo ambigüedad en la determinación de la distancia entre el satélite y el receptor. A continuación se presenta una exploración más detallada de ambas mediciones.
Cálculo del rango satélite-receptor con código PRN
El receptor GNSS utiliza un proceso denominado “Delay Lock Loop” para determinar el retardo de tiempo entre el código transmitido y el código recibido. Este retardo de tiempo, que corresponde al tiempo de propagación de la señal, se convierte luego en una distancia multiplicándolo por la velocidad de la luz.
Sin embargo, debido a los relojes no sincronizados del receptor y del satélite, la distancia resultante se denomina pseudodistancia. Además del error de sincronización del reloj, la pseudodistancia se ve afectada por varios otros errores relacionados con el entorno de propagación (atmósfera, hardware, etc.), que se abordarán más adelante en el artículo.
Mejora del rango satélite-receptor: medición de la fase portadora
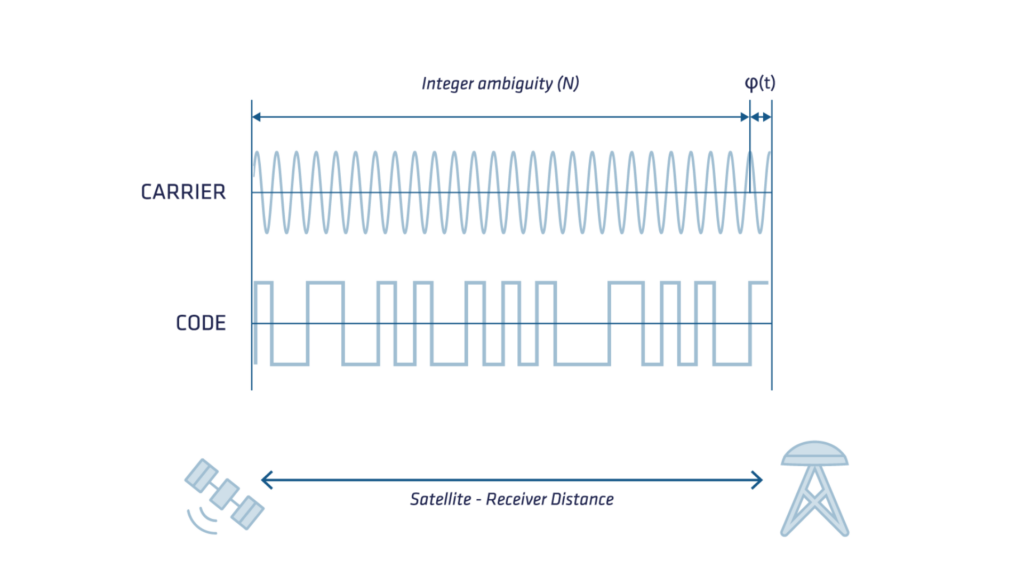
La distancia entre el satélite y el receptor también puede determinarse contando el número de ciclos de fase transcurridos entre la emisión y la recepción de la señal y multiplicando este por la longitud de onda de la portadora.
Esta medición es dos órdenes de magnitud más precisa que la del código, pero un número entero constante y desconocido de ciclos (también conocido como ambigüedad) afecta su precisión absoluta. Para determinar la evolución precisa de la fase de la portadora, el receptor GNSS acumula los desplazamientos de frecuencia Doppler en la onda portadora, causados por el movimiento relativo del satélite al receptor.
En caso de interrupción de la señal, este proceso de acumulación no puede dar cuenta del movimiento real y se pueden observar saltos abruptos en la medición, también conocidos como “cycle slips”.
La correcta gestión de los cycle slips y la ambigüedad son aspectos desafiantes y clave de las técnicas de posicionamiento de precisión como la cinemática en tiempo real (RTK) y el posicionamiento de punto preciso (PPP).
El siguiente diagrama muestra la onda portadora de la señal, el código y sus respectivas resoluciones.
Fuentes de errores en GNSS
La precisión inicial para el público general (no militar) del GPS era de unos 100 m. Tras los múltiples años de evolución (eliminación de la disponibilidad selectiva, despliegue de nuevas constelaciones y sistemas SBAS, nuevos satélites y nuevas frecuencias), la precisión del GNSS autónomo se sitúa ahora entre 5 m para los receptores GNSS de nivel básico y 1 m para los de gama alta.
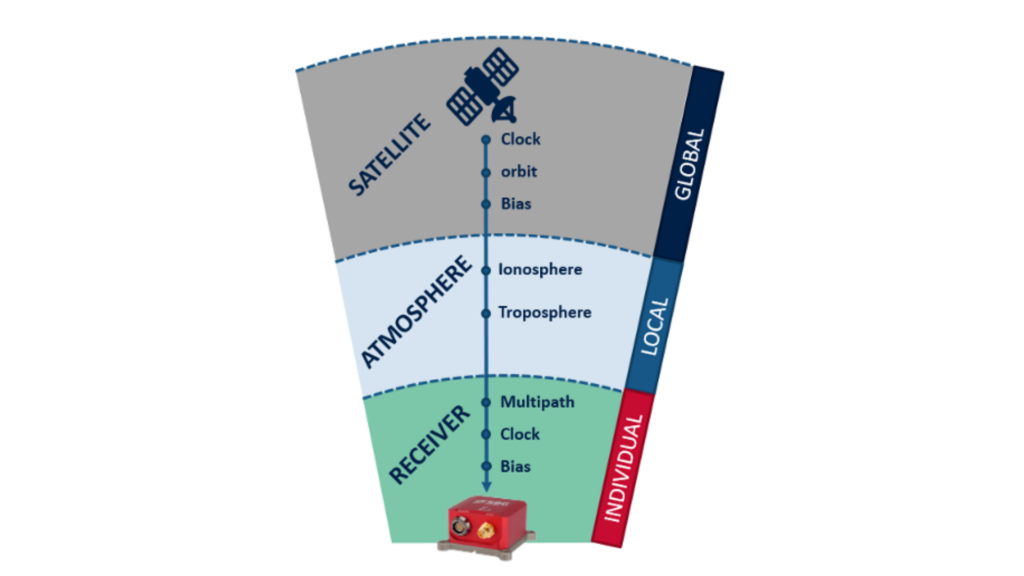
Errores de satélite
- Errores de reloj: Si bien los relojes atómicos de los satélites GNSS son muy precisos, experimentan una ligera deriva. Desafortunadamente, incluso una ligera desviación en el reloj del satélite puede conducir a una discrepancia sustancial en la posición calculada por el receptor. Por ejemplo, ¡tan solo 10 nanosegundos de error de reloj se traducen en un error de posición de 3 metros en la medición del alcance!
- Errores de órbita: Si bien los satélites GNSS siguen órbitas muy precisas y bien documentadas, estas órbitas experimentan pequeñas variaciones, similares a los relojes de los satélites. Al igual que las imprecisiones del reloj, incluso un ligero cambio en la órbita del satélite puede causar un error significativo en la posición calculada. Persisten los errores residuales en la órbita, lo que contribuye a posibles errores de posición de hasta ±2,5 metros.
Errores atmosféricos
- Retraso ionosférico: Situada entre 50 y 1.000 km por encima de la Tierra, la ionosfera contiene iones cargados que afectan a la transmisión de señales de radio, causando errores de posición (normalmente ±5 metros, mayores durante la actividad ionosférica elevada). El retardo ionosférico varía con la actividad solar, la hora del día, la estación y la ubicación, lo que dificulta las predicciones.
- Retraso troposférico: La capa atmosférica inmediata de la Tierra, la troposfera, experimenta variaciones en el retraso debido a los cambios en la humedad, la temperatura y la presión atmosférica.
Errores del receptor
El reloj interno del receptor, que es menos preciso en comparación con el reloj atómico del satélite, junto con otros errores de hardware y software, añaden ruido y sesgo a las mediciones.
| Retraso | Origen | Magnitud |
|---|---|---|
| Error de posición | Satélite | 5m |
| Clock Offser | Satélite | 0-300 km |
| Retardo instrumental | Satélite | 1-10 m |
| Efecto relativista | Satélite | 10 m |
| Retraso ionosférico | Trayectoria (50-1000 km) | 2-50 m |
| Retraso troposférico | Trayectoria (0-12 km) | 2-10 m |
| Retardo instrumental | Receptor | 1-10 m |
| Clock Offset | Receptor | 0-300 km |
Para garantizar una navegación óptima, el sistema debe tener en cuenta estos errores, mitigarlos utilizando un modelo de error específico o estimarlos a través del filtro de navegación.
El cálculo de la posición también debe considerar muchos otros términos de error no enumerados en este artículo, como los efectos de las mareas y los efectos relativistas.
Diversas fuentes de error influyen en el rendimiento de la tecnología GNSS, que proporciona posicionamiento, navegación y temporización de alta precisión.
Factores como los retrasos atmosféricos, los errores de reloj y efemérides de los satélites, la interferencia multitrayecto y el ruido del receptor pueden degradar la precisión. Si bien las técnicas de corrección modernas (GNSS diferencial, RTK y PPP) ayudan a mitigar el GNSS y sus fuentes de error, comprender sus orígenes sigue siendo esencial para optimizar el rendimiento del GNSS.
A medida que los avances en el procesamiento de señales, la fusión de sensores y el aprendizaje automático continúan evolucionando, los sistemas GNSS serán aún más robustos, garantizando una mayor fiabilidad en diversas aplicaciones.
