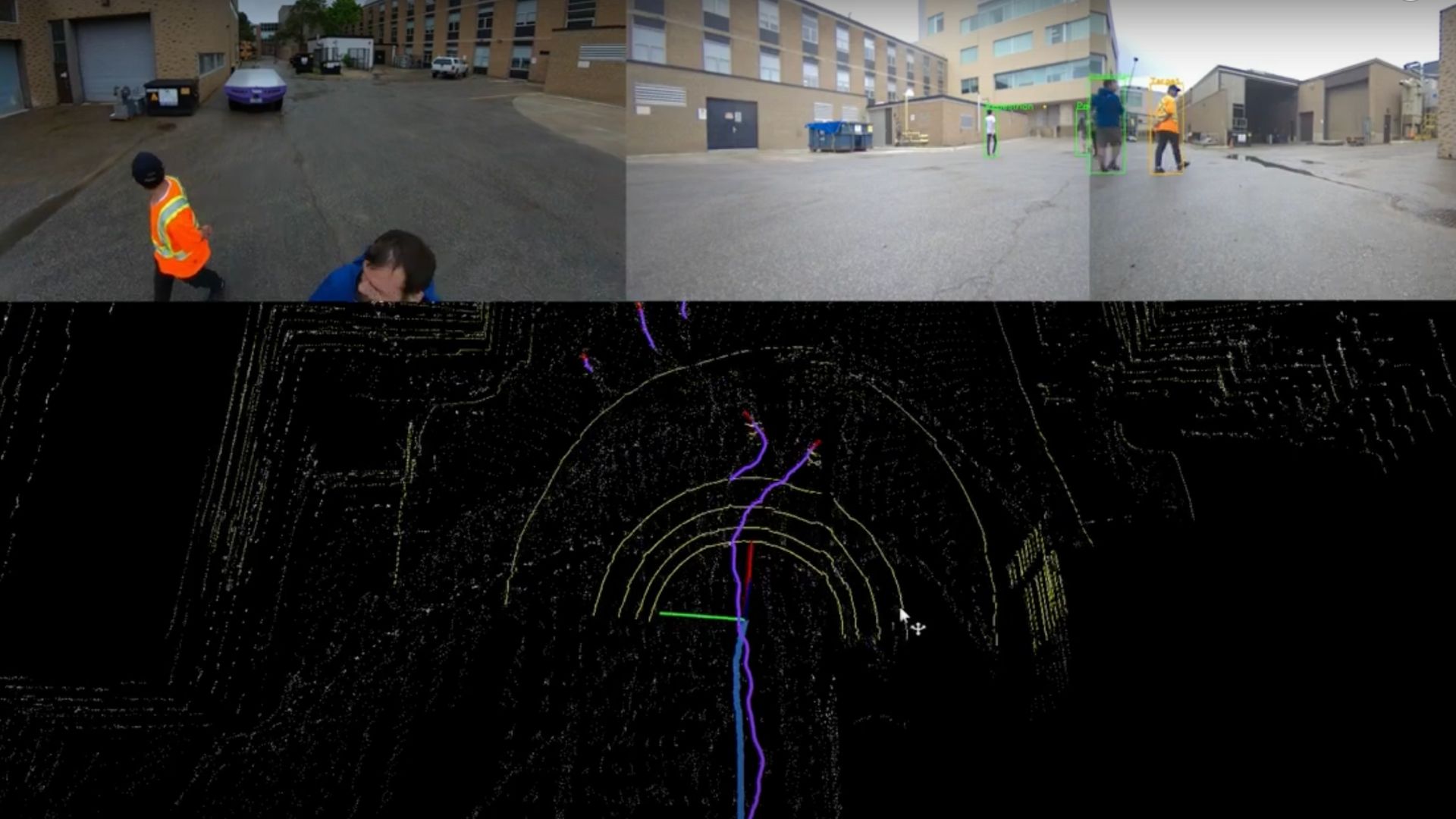
Ellipse-D treibt einen selbstfahrenden LKW an
Selbstfahrender LKW mit unabhängigem Radantrieb und Lenksystem.
“Das Ellipse-D von SBG Systems war einfach zu bedienen, sehr genau und stabil, mit einem kleinen Formfaktor—allesamt wesentlich für unsere WATonoTruck-Entwicklung.” | Amir K., Professor und Direktor, University of Waterloo

Wir alle wissen, dass Unfälle im Straßenverkehr durch Fahrfehler, widrige Wetterbedingungen oder Fahrzeugdefekte verursacht werden. Aber was wäre, wenn wir Fahrzeuge selbstständig fahren lassen könnten, um diese Unfälle zu vermeiden? Zum Beispiel ein selbstfahrender LKW oder ein autonomes Auto.
Das ist die Idee hinter selbstfahrenden Fahrzeugen, und das Mechatronic Vehicle Systems (MVS) Lab der University of Waterloo arbeitet an einem Projekt namens WATonoTruck (WATerloo atonomous Truck).
Es handelt sich um einen selbstfahrenden Pritschenwagen, der für den Umschlag schwerer Materialien, die Landwirtschaft und Serviceanwendungen konzipiert ist. Er verwendet fortschrittliche Steuerungsmethoden, um LKW-Bewegungen zu analysieren, insbesondere in Gefahrensituationen oder bei Fehlfunktionen, um Sicherheit und Effizienz zu gewährleisten.
Das Labor zielt darauf ab, die Anwendung der autonomen Fahrzeugtechnologie über den Personentransport hinaus zu erweitern. Sie wollen sie in anderen Branchen wie Landwirtschaft, Bergbau und Schifffahrt einsetzen und so die Effizienz steigern und die Betriebsunterbrechungen reduzieren.
Wir stellen vor: WATonoTruck
Ein LKW, der keinen Fahrer braucht – das ist WATonoTruck! Es handelt sich um einen selbstfahrenden Pritschenwagen mit unabhängigem Radantrieb und Lenksystem. Er basiert auf der Corner Module (CM)-Plattform.
Die CMs wurden im Hinblick auf ein modulares Fahrzeugdesign entwickelt und können in jeder Konfiguration an jedem Chassis installiert werden.
Jedes CM fungiert als elektrisches Einradfahrzeug, das mit einer eigenen Steuereinheit ausgestattet ist. Es ermöglicht den unabhängigen Betrieb mit Antriebs-, Brems-, Lenk- und Federungssystemen.
Das macht den LKW super intelligent und anpassungsfähig an jede Anwendung und jedes Gelände.
WATonoTruck unterstützt durch Ellipse-D
Als führendes Unternehmen für hochpräzise Positionierungs- und Navigationslösungen sind wir stolz auf die Zusammenarbeit mit dem Mechatronic Vehicle Systems Lab der University of Waterloo.
Wir bieten Ellipse-D, ein Dual-Antennen-RTK-INS, das eine unübertroffene Genauigkeit in Position und Kurs liefert.
Dieses Maß an Präzision ist entscheidend für die autonome Navigation und gewährleistet die sichere und genaue Bewegung von WATonoTruck auch in anspruchsvollen Umgebungen.

Ellipse-D (3. Generation), LiDAR-Sensoren und fortschrittliche Kameras – diese umfassende Sensor-Suite ermöglicht Echtzeit-Umgebungskartierung, Hinderniserkennung und Pfadplanung.
Durch unser Sponsoring erhält die Entwicklung des WATonoTruck durch das Labor entscheidende Unterstützung im Hinblick auf hochpräzise Motion- und Navigation-Lösungen, denen vertraut werden kann.
Dieses gemeinsame Vorhaben trägt nicht nur zur erfolgreichen Entwicklung des WATonoTruck bei, sondern fördert auch das Wachstum autonomer Fahrzeuganwendungen in verschiedenen Branchen und treibt Innovation und Sicherheit im Transportwesen und darüber hinaus voran.

Ellipse-D
Die Ellipse-D ist ein inertiales Navigationssystem, das eine Dual-Antenne und ein Dual-Frequenz RTK GNSS integriert und mit unserer Post-Processing-Software Qinertia kompatibel ist.
Entwickelt für Roboter- und Geodatenanwendungen, kann es den Odometer-Eingang mit Pulse oder CAN OBDII für eine verbesserte Koppelnavigation-Genauigkeit verschmelzen.

Fordern Sie ein Angebot für Ellipse-D an
Haben Sie Fragen?
Willkommen in unserem FAQ-Bereich! Hier finden Sie Antworten auf die häufigsten Fragen zu den Anwendungen, die wir vorstellen. Wenn Sie nicht finden, wonach Sie suchen, können Sie sich gerne direkt an uns wenden!
Was ist der Unterschied zwischen RTK und PPK?
Real-Time Kinematic (RTK) ist eine Positionierungstechnik, bei der GNSS-Korrekturen nahezu in Echtzeit übertragen werden, typischerweise unter Verwendung eines RTCM-Format-Korrekturdatenstroms. Es kann jedoch Herausforderungen bei der Sicherstellung der GNSS-Korrekturen geben, insbesondere hinsichtlich ihrer Vollständigkeit, Verfügbarkeit, Abdeckung und Kompatibilität.
Der Hauptvorteil von PPK gegenüber RTK-Nachverarbeitung besteht darin, dass die Datenverarbeitungsaktivitäten während der Nachverarbeitung optimiert werden können, einschließlich Vorwärts- und Rückwärtsverarbeitung. Bei der Echtzeitverarbeitung führen Unterbrechungen oder Inkompatibilitäten bei den Korrekturen und ihrer Übertragung zu einer geringeren Positionsgenauigkeit.
Ein erster wichtiger Vorteil der GNSS-Nachverarbeitung (PPK) gegenüber der Echtzeitverarbeitung (RTK) besteht darin, dass das im Feld verwendete System keine Datenverbindung/Funkverbindung benötigt, um die RTCM-Korrekturen von der CORS in das INS/GNSS-System einzuspeisen.
Die Haupteinschränkung bei der Einführung der Nachbearbeitung ist die Anforderung, dass die endgültige Anwendung auf die Umgebung reagiert. Wenn Ihre Anwendung jedoch die zusätzliche Verarbeitungszeit verkraften kann, die erforderlich ist, um eine optimierte Trajektorie zu erstellen, wird dies die Datenqualität für alle Ihre Ergebnisse erheblich verbessern.
Was ist Precise Point Positioning?
Precise Point Positioning (PPP) ist eine Satellitennavigationstechnik, die eine hochpräzise Positionierung durch Korrektur von Satellitensignalfehlern bietet. Im Gegensatz zu traditionellen GNSS-Methoden, die oft auf bodengestützten Referenzstationen basieren (wie bei RTK), verwendet PPP globale Satellitendaten und fortschrittliche Algorithmen, um genaue Standortinformationen zu liefern.
PPP funktioniert überall auf der Welt, ohne dass lokale Referenzstationen erforderlich sind. Dies macht es geeignet für Anwendungen in abgelegenen oder anspruchsvollen Umgebungen, in denen es an Bodeninfrastruktur mangelt. Durch die Verwendung präziser Satellitenorbit- und Zeitdaten sowie Korrekturen für atmosphärische und Mehrwegeffekte minimiert PPP gängige GNSS-Fehler und kann eine Genauigkeit im Zentimeterbereich erreichen.
Während PPP für die Nachverarbeitung von Positionierungsdaten eingesetzt werden kann, die die Analyse gesammelter Daten im Nachhinein umfasst, kann es auch Echtzeit-Positionierungslösungen bereitstellen. Echtzeit-PPP (RTPPP) ist zunehmend verfügbar, was es Benutzern ermöglicht, Korrekturen zu empfangen und ihre Position in Echtzeit zu bestimmen.
