Marine Technology integra el INS/GNSS de SBG en su USV HydroDron
Nuestro cliente, Marine Technology, presentó su buque hidrográfico no tripulado totalmente nuevo en BaltExpo, equipado con nuestro INS Ekinox-D.
“Ekinox-D es el INS/GNSS RTK perfecto para USV, ya que combina GNSS de grado topográfico en un formato muy compacto.” | Marine Technology

Marine Technology presentó HydroDron, el primer buque hidrográfico autónomo no tripulado en Polonia, en Baltexpo 2019. El proyecto, recientemente finalizado, fue cofinanciado por el Centro Nacional de Investigación y Desarrollo y fue galardonado en el concurso Baltexpo Golden Anchor 2019.

HydroDron permite realizar levantamientos en aguas inaccesibles
HydroDron es un catamarán no tripulado fabricado con material ligero y duradero, con un sistema de doble casco (4 m de largo y 2 m de ancho).
La parte del motor, equipada con dos motores eléctricos que funcionan independientemente uno del otro, proporciona la velocidad y la maniobrabilidad adecuadas, alcanzando una velocidad máxima de más de 10 nudos.
Esta plataforma flotante autónoma y controlada a distancia, dedicada a mediciones hidrográficas en aguas limitadas, se caracteriza por su movilidad.
Es posible transportarla en el área de la misión en un remolque de coche o en una embarcación de superficie más grande y lanzarla desde el remolque desde la playa, la orilla, el muelle, la plataforma o la embarcación de superficie.
HydroDron opera en aguas inaccesibles o difíciles para unidades tripuladas más grandes, lo que hace que su uso sea imposible o no rentable.
Un USV totalmente equipado para hidrografía
El desarrollo de los sistemas de navegación autónoma y de hidrografía 3D automática de la plataforma representa una mejora significativa de la plataforma de superficie multiuso controlada a distancia de Marine Technology para operar en zonas portuarias y otras zonas restringidas.
La plataforma ahora podrá realizar misiones batimétricas, de sonar y otras mediciones en modo totalmente autónomo, implementando la planificación adaptativa de trayectorias y el análisis 3D automático de los datos de medición de la situación en tiempo casi real alrededor de la plataforma.
Equipo HydroDron
HydroDron integra una amplia gama de equipos de medición con el fin de ofrecer una multitud de variantes diferentes:
- Sistema integrado de batimetría y sonar 3DSS-DX-450 de Ping DSP
- Ordenador industrial para la adquisición de datos Getac S410 (el elemento principal de la estación hidrográfica)
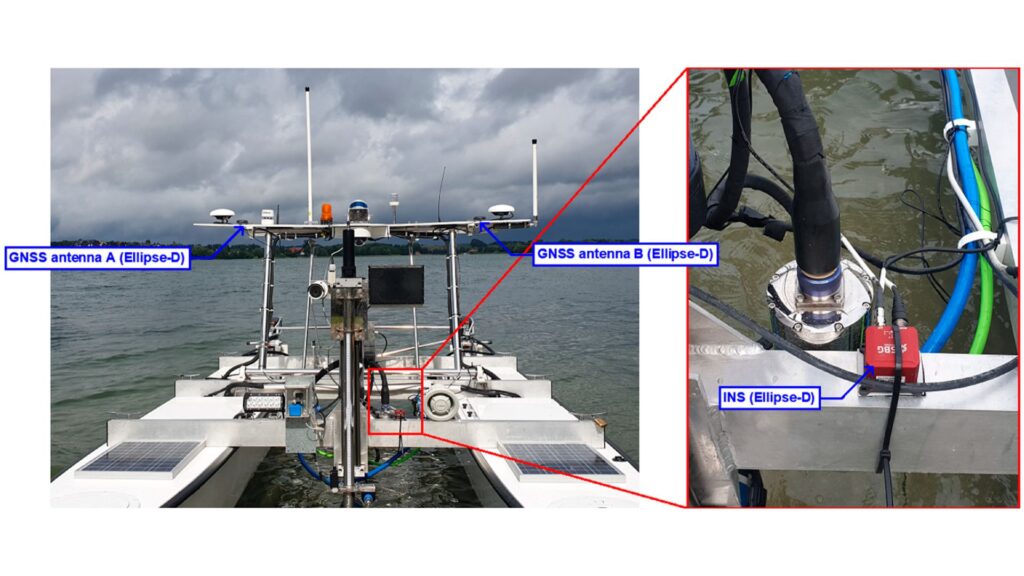
- Sistema de navegación inercial de doble antena externa Ekinox2-D de SBG Systems
- Sonar de doble frecuencia de haz único HydroBox HD de Syqwest
- Sonda monohaz de alta frecuencia Echologger EU400
- LiDAR PUCK VLP-16 de Velodyne
Un sistema de sensores supervisa la plataforma y su entorno para mejorar el conocimiento de la situación. Además, incluye dos sondas verticales, una por casco, dos cámaras de vídeo y una estación meteorológica. Además, el sistema registra los datos de navegación, el vídeo de ambas cámaras, las condiciones meteorológicas, la tensión de la batería y la profundidad de los flotadores. Además, un radar y dos telémetros láser en la proa y la popa apoyan el sistema anticolisión de la unidad.

La estación costera recibe datos de navegación, gestionados por dos consolas:
- una consola de navegación
- uno hidrográfico con un ordenador Getac.
El software Hypack garantiza las mediciones hidrográficas, desde la planificación del trabajo hasta el desarrollo del producto final. Los datos hidrográficos de la sonda multihaz y el LiDAR se registran a bordo de ordenadores industriales.
El sistema de navegación inercial Ekinox-D
El compacto Ekinox-D Dual Antenna INS de SBG Systems integra una IMU de grado topográfico con un receptor GNSS RTK de doble antena. Además, este avanzado INS/GNSS proporciona orientación, compensación de oleaje (heave) y precisión de posicionamiento a nivel centimétrico. Su pequeño tamaño, su bajo peso y su robusta carcasa IP68 lo hacen ideal para aplicaciones con limitaciones de espacio, como los USV. Además, los sensores Ekinox cuentan con un registrador de datos de 8 GB para el análisis posterior a la operación o el post-procesamiento.
Además, el sistema incluye una interfaz web fácil de usar para simplificar el funcionamiento. Los datos de este sensor inercial también pueden ser post-procesados con el software PPK interno de SBG, Qinertia.
Finalmente, Qinertia mejora el rendimiento del INS de SBG procesando los datos inerciales con las observables GNSS en bruto. También proporciona correcciones RTK offline de más de 8.000 estaciones base en 164 países, siempre actualizadas.


Ekinox-D
Ekinox-D es un sistema de navegación inercial todo en uno con receptor GNSS RTK integrado, ideal para aplicaciones en las que el espacio es fundamental.
Este avanzado INS/GNSS viene con una o dos antenas y proporciona orientación, compensación de oleaje (heave) y posición con precisión centimétrica.

Solicitar un presupuesto para Ekinox-D
¿Tiene alguna pregunta?
¡Bienvenido a nuestra sección de preguntas frecuentes! Aquí encontrará respuestas a las preguntas más comunes sobre nuestras aplicaciones presentadas. Además, si no encuentra la respuesta que necesita, póngase en contacto con nosotros directamente para obtener ayuda.
¿Qué son los sensores de medición de olas?
Los sensores de medición de olas son herramientas esenciales para comprender la dinámica oceánica y mejorar la seguridad y la eficiencia en las operaciones marinas. Al proporcionar datos precisos y oportunos sobre las condiciones de las olas, ayudan a tomar decisiones en diversos sectores, desde el transporte marítimo y la navegación hasta la conservación del medio ambiente. Las boyas de oleaje son dispositivos flotantes equipados con sensores para medir parámetros de las olas como la altura, el período y la dirección.
Normalmente utilizan acelerómetros o giróscopos para detectar el movimiento de las olas (por ejemplo, el período de las olas) y pueden transmitir datos en tiempo real a instalaciones en tierra para su análisis.
¿Qué es la topografía hidrográfica?
El levantamiento hidrográfico es el proceso de medición y cartografía de las características físicas de las masas de agua, incluidos océanos, ríos, lagos y zonas costeras. Implica la recopilación de datos relacionados con la profundidad, la forma y los contornos del lecho marino (cartografía del lecho marino), así como la ubicación de objetos sumergidos, peligros para la navegación y otras características submarinas (por ejemplo, fosas marinas). El levantamiento hidrográfico es crucial para diversas aplicaciones, como la seguridad de la navegación, la gestión costera y el levantamiento costero, la construcción y el control medioambiental.
La topografía hidrográfica implica varios componentes clave, comenzando con la batimetría, que mide la profundidad del agua y la topografía del fondo marino utilizando sistemas de sonar como ecosondas de haz único o multihaz que envían pulsos de sonido al fondo marino y miden el tiempo de retorno del eco.
Un posicionamiento preciso es fundamental y se logra utilizando sistemas globales de navegación por satélite (GNSS) y sistemas de navegación inercial (INS) para vincular las mediciones de profundidad con coordenadas geográficas precisas. Además, se miden los datos de la columna de agua, como la temperatura, la salinidad y las corrientes, y se recopilan datos geofísicos para detectar objetos, obstáculos o peligros submarinos utilizando herramientas como el sonar de barrido lateral y los magnetómetros.
¿Qué es la batimetría?
La batimetría es el estudio y la medición de la profundidad y la forma del terreno submarino, centrado principalmente en el mapeo del fondo marino y otros paisajes sumergidos. Es el equivalente submarino de la topografía, proporcionando información detallada sobre las características submarinas de océanos, mares, lagos y ríos. La batimetría desempeña un papel crucial en diversas aplicaciones, como la navegación, la construcción marina, la exploración de recursos y los estudios medioambientales.
Las técnicas batimétricas modernas se basan en sistemas de sonar, como las ecosondas monohaz y multihaz, que utilizan ondas sonoras para medir la profundidad del agua. Estos dispositivos envían pulsos de sonido hacia el fondo marino y registran el tiempo que tardan los ecos en regresar, calculando la profundidad en función de la velocidad del sonido en el agua. Las ecosondas multihaz, en particular, permiten cartografiar amplias franjas del fondo marino de una sola vez, proporcionando representaciones del fondo marino muy detalladas y precisas. Frecuentemente, se asocia una solución RTK + INS para crear representaciones batimétricas 3D del fondo marino con un posicionamiento preciso.
Los datos batimétricos son esenciales para crear cartas náuticas, que ayudan a guiar a los buques de forma segura mediante la identificación de posibles peligros submarinos, como rocas sumergidas, restos de naufragios y bancos de arena. También desempeñan un papel vital en la investigación científica, ayudando a los investigadores a comprender las características geológicas submarinas, las corrientes oceánicas y los ecosistemas marinos.
¿Para qué se utiliza una boya?
Una boya es un dispositivo flotante utilizado principalmente en entornos marítimos y acuáticos para varios propósitos clave. Las boyas se colocan a menudo en lugares específicos para marcar pasos seguros, canales o zonas peligrosas en masas de agua. Guían a los barcos y embarcaciones, ayudándoles a evitar puntos peligrosos como rocas, aguas poco profundas o restos de naufragios.
Se utilizan como puntos de anclaje para embarcaciones. Las boyas de amarre permiten a los barcos amarrarse sin tener que fondear, lo que puede ser especialmente útil en zonas donde el fondeo es poco práctico o perjudicial para el medio ambiente.
Las boyas instrumentadas están equipadas con sensores para medir las condiciones ambientales como la temperatura, la altura de las olas, la velocidad del viento y la presión atmosférica. Estas boyas proporcionan datos valiosos para la previsión meteorológica, la investigación climática y los estudios oceanográficos.
Algunas boyas actúan como plataformas para recoger y transmitir datos en tiempo real del agua o del lecho marino, y se utilizan a menudo en la investigación científica, la vigilancia medioambiental y las aplicaciones militares.
En la pesca comercial, las boyas marcan la ubicación de las trampas o redes. También ayudan en la acuicultura, marcando las ubicaciones de las granjas submarinas.
Las boyas también pueden marcar áreas designadas, como zonas de no fondeo, zonas de no pesca o zonas de baño, lo que ayuda a hacer cumplir las regulaciones en el agua.
En todos los casos, las boyas son fundamentales para garantizar la seguridad, facilitar las actividades marítimas y apoyar la investigación científica.
¿Qué es la flotabilidad?
La flotabilidad es la fuerza ejercida por un fluido (como el agua o el aire) que se opone al peso de un objeto sumergido en él. Permite que los objetos floten o asciendan a la superficie si su densidad es menor que la del fluido. La flotabilidad se produce debido a la diferencia de presión ejercida sobre las porciones sumergidas del objeto: se aplica una mayor presión a profundidades más bajas, creando una fuerza ascendente.
El principio de flotabilidad se describe mediante el principio de Arquímedes, que establece que la fuerza de flotación ascendente sobre un objeto es igual al peso del fluido desplazado por el objeto. Si la fuerza de flotación es mayor que el peso del objeto, éste flotará; si es menor, el objeto se hundirá. La flotabilidad es esencial en muchos campos, desde la ingeniería marina (diseño de barcos y submarinos) hasta la funcionalidad de dispositivos flotantes como las boyas.
¿Qué es un ROV?
Un ROV, o Vehículo Operado Remotamente, es un robot submarino no tripulado diseñado para operar en entornos demasiado profundos, peligrosos o inaccesibles para buzos humanos. Los ROV se utilizan ampliamente en industrias marinas como la de petróleo y gas offshore, la investigación científica, la monitorización ambiental y las operaciones navales. A diferencia de los vehículos submarinos autónomos (AUV), que operan de forma independiente siguiendo rutas preprogramadas, los ROV suelen estar conectados a una embarcación de superficie mediante un cable umbilical que proporciona energía, comunicación y señales de control. Este cable permite a un operador humano en la superficie pilotar el vehículo en tiempo real, proporcionando una maniobra, monitorización y control precisos de los sensores y manipuladores a bordo.
Los ROV están equipados con una variedad de instrumentos según su misión. Comúnmente llevan cámaras de alta definición para inspección visual, sistemas de sonar para cartografía y navegación, y brazos manipuladores para interactuar con objetos en el lecho marino. Los modelos avanzados pueden incluir sensores especializados como sondas ambientales, magnetómetros y sistemas de navegación inercial (INS) para mantener un posicionamiento preciso en condiciones submarinas desafiantes. Dado que las señales GPS/GNSS no pueden penetrar el agua, los ROV dependen de una combinación de sistemas de posicionamiento acústico, sondas Doppler de velocidad (DVL), sensores de presión y navegación inercial para estimar su posición relativa a la embarcación de superficie o a un punto de referencia fijo. Los ROV de alta precisión utilizados en la construcción submarina o la investigación científica a menudo integran IMU de grado táctico para garantizar una precisión a nivel centimétrico durante operaciones prolongadas, incluso en áreas con poca cobertura acústica.
El diseño de un ROV es altamente modular, lo que permite acoplar diferentes cargas útiles según los requisitos de la misión. Los ROV de clase observación pequeños son ligeros y portátiles, destinados a inspecciones visuales sencillas, mientras que los ROV de clase trabajo son mucho más grandes, capaces de tareas pesadas como la construcción submarina, la reparación de tuberías o la recolección de muestras. Los ROV proporcionan un acceso inigualable a los entornos submarinos, ampliando las capacidades humanas y permitiendo operaciones a profundidades y duraciones que de otro modo serían imposibles. En esencia, un ROV es tanto una herramienta de exploración versátil como una plataforma de precisión para ejecutar misiones submarinas complejas, tendiendo un puente entre la supervisión humana y la capacidad robótica remota.
