Marine TechnologyがUSV HydroDronにSBG SystemsのINS/GNSSを統合
当社のクライアントである Marine Technology は、当社の Ekinox-D INS を搭載した完全に新しい水路測量無人艇を BaltExpo で発表しました。
「Ekinox-D は、測量グレードの GNSS を非常にコンパクトなフォームファクタで組み合わせているため、USV に最適な RTK INS/GNSS です。」 | Marine Technology

Marine Technologyは、ポーランド初の自律型水路無人艇HydroDronをBaltexpo 2019で発表しました。最近完了したこのプロジェクトは、国立研究開発センターから共同出資を受け、Baltexpo Golden Anchor 2019コンペティションで受賞しました。

HydroDronによる、アクセス困難な水域でのサーベイ
HydroDronは、軽量で耐久性のある素材で作られた無人双胴船で、二重船体システム(長さ4m、幅2m)を備えています。
エンジン部は、互いに独立して作動する2つの電気モーターを搭載し、適切な速度と操縦性を提供し、最大速度は10ノットを超えます。
この自律型で遠隔操作が可能な浮遊プラットフォームは、限定された水域での水路計測専用であり、機動性に優れていることが特徴です。
車のトレーラーまたはより大きな水上船舶でミッションエリアに運び、ビーチ、岸、埠頭、プラットフォーム、または水上船舶からトレーラーで発進させることができます。
HydroDronは、大型の有人ユニットではアクセスできない、または困難な水域で作動し、それらの使用を不可能または非効率にしています。
水路測量向けに完全に装備されたUSV
プラットフォームの自律航法システムと自動3D水路システムの開発は、港湾地域やその他の制限区域での運用を目的とした、マリンテクノロジー社の遠隔制御多目的水上プラットフォームの大幅な改良を意味します。
このプラットフォームは、適応的な軌道計画とプラットフォーム周辺の準リアルタイムな状況測定データの自動3D解析を実装し、完全自律モードで深浅測量、ソナー、その他の測定ミッションを実行できるようになります。
HydroDron 装置
HydroDronは、さまざまなバリアントを提供するために、幅広い測定機器を統合しています。
- Ping DSP社製 統合型測深・ソナーシステム 3DSS-DX-450
- データ収集用産業用コンピュータ Getac S410(水路測量ステーションの主要要素)
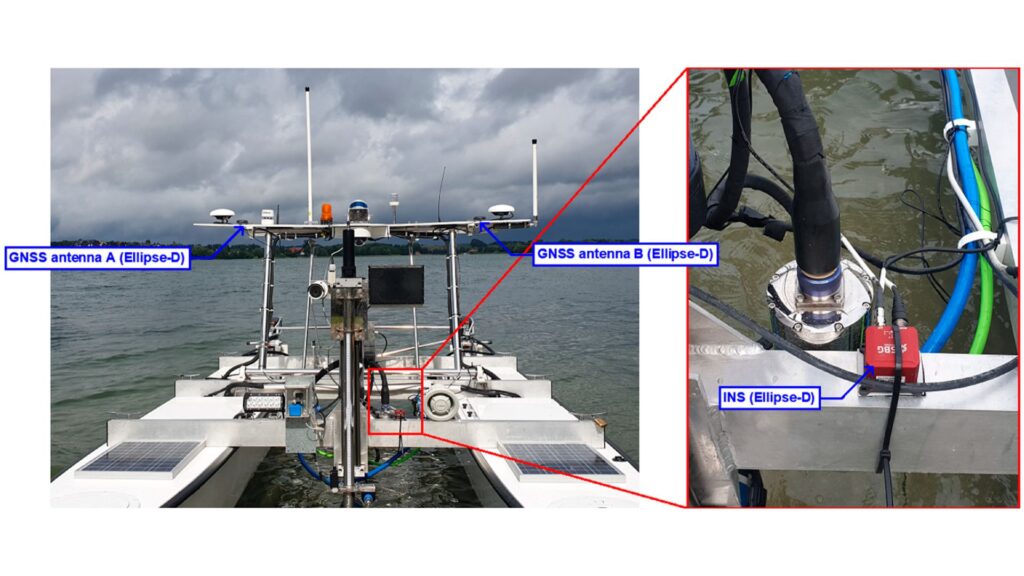
- SBG Systemsの外部デュアルアンテナ慣性航法システムEkinox2-D
- Syqwest社製シングルビーム二周波ソナー HydroBox HD
- 高周波シングルビームソナーEchologger EU400
- Velodyne社のLiDAR PUCK VLP-16
センサーシステムは、プラットフォームとその周辺を監視して、状況認識を向上させます。さらに、船体ごとに1つずつ、2つの垂直プローブ、2つのビデオカメラ、および気象ステーションが含まれています。さらに、システムは、ナビゲーションデータ、両方のカメラからのビデオ、気象条件、バッテリー電圧、およびフロート深度を記録します。さらに、船首と船尾のレーダーと2つのレーザーレンジファインダーが、ユニットの衝突防止システムをサポートします。

陸上ステーションは、2つのコンソールで管理されるナビゲーションデータを受信します。
- ナビゲーションコンソール
- Getacコンピューターを備えた水路測量用
Hypackソフトウェアは、作業の計画から最終製品の開発まで、水路計測を保証します。マルチビームプローブおよびLiDARからの水路データは、オンボードの産業用コンピュータに記録されます。
Ekinox-D 慣性航法システム
SBG SystemsのコンパクトなEkinox-DデュアルアンテナINSは、測量グレードのIMUとデュアルアンテナRTK GNSS受信機を統合しています。さらに、この高度なINS/GNSSは、姿勢、ヒーブ、およびセンチメートルレベルの位置決め精度を提供します。小型、軽量、および堅牢なIP68エンクロージャにより、USVなどのスペースが限られたアプリケーションに最適です。さらに、Ekinoxセンサーは、運用後の分析または後処理のために8 GBのデータロガーを備えています。
さらに、システムには、操作を簡素化するための使いやすいWebインターフェースが含まれています。この慣性センサーからのデータは、SBGの社内PPKソフトウェアであるQinertiaで後処理することもできます。
最後に、Qinertiaは、慣性データを生のGNSS観測値で処理することにより、SBG INSのパフォーマンスを向上させます。また、常に最新の状態に保たれている、164か国の8,000を超える基地局からのオフラインRTK補正も提供します。


Ekinox-D
Ekinox-Dは、スペースが限られた用途に最適な、RTK GNSS受信機を内蔵したオールインワンの慣性航法システムです。
この高度なINS/GNSSは、1つまたは2つのアンテナを備え、方位、ヒーブ、センチメートルレベルの位置情報を提供します。

Ekinox-Dの見積もりを依頼する
ご質問はありますか?
FAQセクションへようこそ!ここでは、紹介するアプリケーションに関する最も一般的な質問への回答を見つけることができます。さらに、必要な回答が見つからない場合は、直接お問い合わせください。
波浪計測センサーとは?
水路測量とは?
水路測量とは、海洋、河川、湖沼、沿岸地域などの水域の物理的特徴を計測し、マッピングするプロセスです。水深、海底の形状と輪郭(海底マッピング)、水没物体の位置、航行上の危険物、その他の水中構造物(水溝など)に関するデータを収集します。水路測量は、航行の安全、沿岸管理および沿岸サーベイ、建設、環境モニタリングなど、さまざまな用途にとって非常に重要です。
水路測量には、いくつかの重要なコンポーネントが含まれます。まず、水深を測定し、海底地形を測定する測深です。測深には、シングルビームまたはマルチビーム音響測深機などのソナーシステムを使用します。これらのシステムは、音響パルスを海底に送信し、エコーの戻り時間を測定します。
正確な位置特定は非常に重要であり、全地球航法衛星システム(GNSS)と慣性航法システム(INS)を使用して深度測定を正確な地理座標にリンクさせることで実現されます。さらに、水温、塩分、海流などの水柱データが測定され、サイドスキャンソナーや磁力計などのツールを使用して、水中の物体、障害物、または危険物を検出するために地球物理学的データが収集されます。
水深測量とは?
水深測量とは、水中の地形の深度と形状の調査および測定であり、主に海底およびその他の水没した地形のマッピングに焦点を当てています。これは地形の水中版であり、海洋、海、湖、川の水中の特徴に関する詳細な洞察を提供します。水深測量は、航行、海洋建設、資源探査、環境研究など、さまざまなアプリケーションで重要な役割を果たします。
最新の深浅測量技術は、シングルビームやマルチビーム音響測深機などのソナーシステムを利用しており、音波を使用して水深を測定します。これらの装置は、海底に向けて音のPulseを発信し、エコーが戻ってくるまでの時間を記録し、水中での音速に基づいて深度を計算します。特にマルチビーム音響測深機は、一度に広い範囲の海底をマッピングできるため、非常に詳細で正確な海底の表現が可能です。多くの場合、正確な位置情報を持つ3D海底地形図を作成するために、RTK + INSソリューションが使用されます。
水深データは、水没した岩、難破船、砂州などの潜在的な水中の危険を特定することにより、船舶の安全な航行を支援する航海図を作成するために不可欠です。また、科学研究においても重要な役割を果たし、研究者が水中の地質学的特徴、海流、海洋生態系を理解するのに役立ちます。
ブイは何に使用されますか?
ブイは、主に海洋および水上環境で使用される浮遊装置であり、いくつかの重要な目的で使用されます。ブイは多くの場合、安全な航路、水路、または水域の危険区域を示すために特定の場所に設置されます。船舶を誘導し、岩、浅瀬、難破船などの危険な場所を回避するのに役立ちます。
これらは、船舶の固定点として使用されます。係留ブイを使用すると、ボートはアンカーを下ろすことなく係留できます。これは、アンカーを下ろすことが非現実的であるか、環境に悪影響を与える可能性がある地域で特に役立ちます。
計測ブイには、温度、波高、風速、気圧などの環境条件を測定するためのセンサーが装備されています。これらのブイは、天気予報、気候研究、海洋研究に役立つデータを提供します。
一部のブイは、水面や海底からリアルタイムのデータを収集・送信するプラットフォームとして機能し、科学研究、環境モニタリング、軍事用途でよく使用されます。
商業漁業では、ブイはトラップや網の位置を示すために使用されます。また、水産養殖にも役立ち、水中の養殖場の位置を示します。
ブイはまた、投錨禁止区域、禁漁区域、遊泳区域など、指定された区域を示すことができ、水上での規制の実施に役立ちます。
いずれの場合も、ブイは安全性の確保、海洋活動の促進、科学研究のサポートに不可欠です。
浮力とは?
浮力とは、水や空気などの流体が、水中に沈んだ物体の重量に対抗して及ぼす力のことです。物体の密度が流体の密度よりも低い場合、物体は浮いたり、水面に浮上したりすることができます。浮力は、物体の水没部分に及ぼされる圧力の差によって生じます。水深が深くなるほど大きな圧力がかかり、上向きの力が生まれます。
浮力の原理は、アルキメデスの原理によって説明されます。アルキメデスの原理とは、物体に作用する上向きの浮力は、その物体によって排除された流体の重量に等しいというものです。浮力が物体の重量よりも大きい場合、物体は浮き、小さい場合は沈みます。浮力は、海洋工学(船舶や潜水艦の設計)からブイのような浮遊装置の機能まで、多くの分野で不可欠です。
ROVとは何ですか?
ROV(Remotely Operated Vehicle:遠隔操作無人潜水機)は、人間ダイバーにとって深すぎたり、危険すぎたり、その他アクセス不可能な環境で運用するために設計された無人水中ロボットです。ROVは、海洋石油・ガス、科学研究、環境モニタリング、海軍作戦といった海洋産業で広く利用されています。事前プログラムされた経路に従って自律的に動作する自律型無人潜水機(AUV)とは異なり、ROVは通常、電力、通信、制御信号を供給するアンビリカルケーブルを介して水上船にテザー接続されています。このテザーにより、水上の人間オペレーターがリアルタイムで機体を操縦し、機載センサーやマニピュレーターの精密な操縦、監視、制御を行うことができます。
ROVは、ミッションに応じて様々な計器を搭載しています。一般的に、目視検査用の高精細カメラ、マッピングおよびナビゲーション用のソナーシステム、海底の物体と相互作用するためのマニピュレーターアームを搭載しています。高度なモデルには、環境プローブ、磁力計、そして困難な水中条件下で正確な測位を維持するための慣性航法システム(INS)などの特殊センサーが含まれる場合があります。GPS/GNSS信号は水中を透過しないため、ROVは音響測位システム、ドップラー速度ログ(DVL)、圧力センサー、慣性航法の組み合わせに依存して、水上船または固定基準点に対する位置を推定します。海中建設や科学研究で使用される高精度ROVは、音響カバレッジが不十分な領域でも、長期間の運用においてセンチメートルレベルの精度を確保するために、タクティカルグレードのIMUを統合することがよくあります。
ROVの設計は高度にモジュール式であり、ミッション要件に応じて異なるペイロードを取り付けることができます。小型の観測クラスROVは軽量で持ち運び可能であり、簡単な目視検査を目的としていますが、作業クラスROVははるかに大きく、海中建設、パイプライン修理、サンプル採取などの重作業が可能です。ROVは水中環境への比類ないアクセスを提供し、人間の能力を拡張し、他の方法では不可能な深度と期間での運用を可能にします。要するに、ROVは多用途な探査ツールであると同時に、複雑な水中ミッションを実行するための精密なプラットフォームであり、人間の監視と遠隔ロボット能力との間のギャップを埋めるものです。
