Marine Technology 将 SBG 的 INS/GNSS 集成到其 USV HydroDron 中
我们的客户 Marine Technology 在 BaltExpo 上展示了他们全新的水文无人船,该船配备了我们的 Ekinox-D INS。
“Ekinox-D 是 USV 的完美 RTK INS/GNSS,因为它将测量级 GNSS 整合在一个非常紧凑的外形中。” | Marine Technology

船舶技术公司在 2019 年 Baltexpo 上展示了 HydroDron,这是波兰首艘自主水文无人船。这个最近完成的项目由国家研究与发展中心共同资助,并在 Baltexpo Golden Anchor 2019 竞赛中获奖。

HydroDron 允许在难以进入的水域进行测量
HydroDron 是一种由轻质耐用材料制成的无人双体船,采用双船体系统(长 4 米,宽 2 米)。
发动机部分配备两个彼此独立工作的电动机,提供足够的航速和机动性,最高航速超过 10 节。
这种自主和远程控制的浮动平台专用于在有限水域进行水文测量,其特点是具有移动性。
可以将其放在汽车拖车或更大的水面船只上的任务区域中,然后从海滩、岸边、码头、平台或水面船只的拖车上发射。
HydroDron 在大型载人设备无法进入或难以进入的水域中运行,从而使其使用变得不可能或无利可图。
为水文地理配备齐全的 USV
该平台的自主导航和自动3D水文测绘系统的开发,代表了Marine Technology公司用于港口区域和其他限制区域作业的遥控多用途水面平台的一项重大改进。
该平台现在将能够以完全自主模式执行测深、声纳和其他测量任务,从而实施自适应轨迹规划和平台周围近实时态势测量数据的自动 3D 分析。
HydroDron 设备
HydroDron 集成了各种测量设备,以便提供多种不同的变体:
- Ping DSP 的集成测深和声纳系统 3DSS-DX-450
- 用于数据采集的工业计算机 Getac S410(水文站的主要元件)
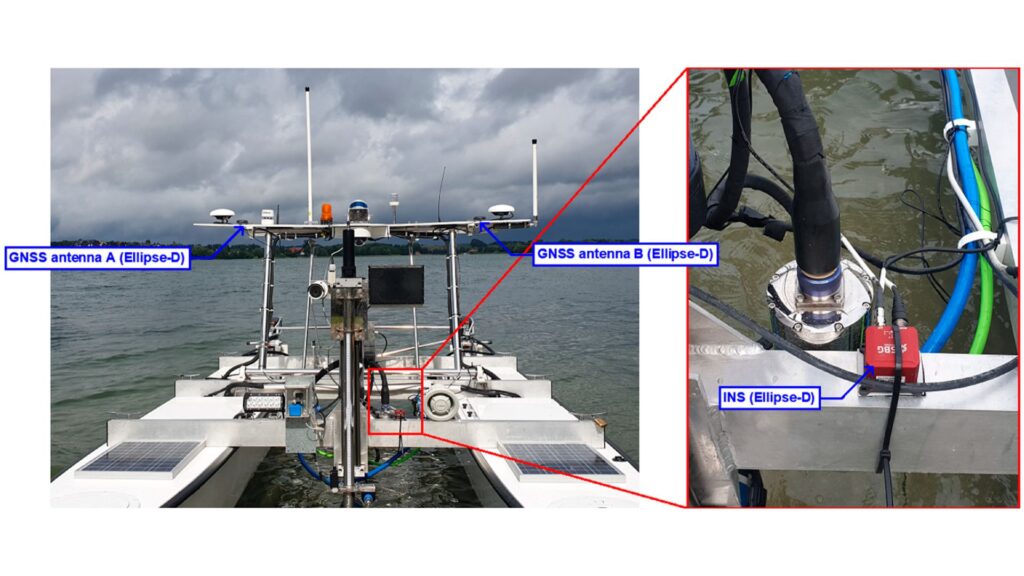
- SBG Systems 的外部双天线惯性导航系统 Ekinox2-D
- Syqwest 公司的单波束双频声呐 HydroBox HD
- 高频单波束声纳 Echologger EU400
- Velodyne 的 LiDAR PUCK VLP-16
传感器系统会监测平台及其周围环境,以增强态势感知能力。此外,它还包括两个垂直探头(每个船体一个)、两个摄像机和一个气象站。此外,该系统还会记录导航数据、来自两个摄像机的视频、天气状况、电池电压和浮筒深度。此外,船首和船尾的雷达和两个激光测距仪为该装置的防撞系统提供支持。

岸基站接收由两个控制台管理的导航数据:
- 导航控制台
- 一台带有 Getac 计算机的水文测量设备。
Hypack 软件可确保从工作规划到最终产品开发的水文测量。来自多波束探头和 LiDAR 的水文数据记录在船载工业计算机上。
Ekinox-D 惯性导航系统
SBG Systems 的紧凑型 Ekinox-D 双天线 INS 集成了测量级 IMU 和双天线 RTK GNSS 接收器。此外,这种先进的 INS/GNSS 提供方向、升沉和厘米级定位精度。其小尺寸、轻重量和坚固的 IP68 外壳使其成为空间受限应用(如 USV)的理想选择。此外,Ekinox 传感器还具有 8 GB 数据记录器,用于操作后分析或后处理。
此外,该系统还包括一个易于使用的 Web 界面,可简化操作。来自此惯性传感器的数据也可以使用 SBG 的内部 PPK 软件 Qinertia 进行后处理。
最后,Qinertia 通过使用原始 GNSS 观测值处理惯性数据来增强 SBG INS 性能。它还提供来自 164 个国家/地区的 8,000 多个基站的离线 RTK 校正,并始终保持最新状态。


Ekinox-D
Ekinox-D 是一款一体式惯性导航系统,集成了 RTK GNSS 接收器,非常适合空间至关重要的应用。
这款先进的 INS/GNSS 配备一个或两个天线,可提供方向、升沉和厘米级定位精度。

询价 Ekinox-D
您有疑问吗?
欢迎访问我们的常见问题解答部分!在这里,您可以找到关于我们展示的应用的最常见问题的答案。此外,如果您找不到您需要的答案,请直接联系我们以获得帮助。
什么是波浪测量传感器?
什么是水文测量?
水文测量是测量和绘制水体(包括海洋、河流、湖泊和沿海地区)物理特征的过程。它涉及收集与海底的深度、形状和轮廓(海底测绘)以及水下物体、导航危险和其他水下特征(例如水槽)的位置相关的数据。水文测量对于各种应用至关重要,包括导航安全、海岸管理和沿海测量、建筑和环境监测。
水文测量 涉及几个关键组成部分,首先是测深,它使用声纳系统(如单波束或多波束回声测深仪)测量水深和海底地形,这些系统向海底发送声脉冲并测量回声的返回时间。
精确定位至关重要,它通过使用全球导航卫星系统 (GNSS) 和惯性导航系统 (INS) 将深度测量链接到精确的地理坐标来实现。此外,还会测量水柱数据(如温度、盐度和水流),并收集地球物理数据,以使用侧扫声纳和磁力计等工具检测水下物体、障碍物或危险。
什么是水深测量?
测深是对水下地形的深度和形状进行研究和测量的学科,主要侧重于绘制海底和其他水下地貌。它是水下地形的等效物,提供了对海洋、湖泊和河流的水下特征的详细了解。测深在各种应用中起着至关重要的作用,包括导航、海洋建设、资源勘探和环境研究。
现代测深技术依赖于声纳系统,例如单波束和多波束回声测深仪,它们使用声波来测量水深。这些设备向海底发送声波脉冲,并记录回声返回所需的时间,根据水中声速计算深度。特别是多波束回声测深仪,可以一次绘制大片海底地图,从而提供高度详细和准确的海底表示。通常,RTK + INS 解决方案与创建精确定位的海底 3D 测深表示相关联。
水深数据对于创建航海图至关重要,它通过识别潜在的水下危险(如水下岩石、沉船和沙洲)来帮助安全引导船只。它还在科学研究中发挥着至关重要的作用,帮助研究人员了解水下地质特征、洋流和海洋生态系统。
浮标有什么用途?
浮标是一种漂浮装置,主要用于海事和水基环境中,用于几个关键目的。浮标通常放置在特定位置,以标记水域中的安全通道、航道或危险区域。它们引导船舶,帮助它们避开危险地点,如岩石、浅水区或沉船。
它们被用作船只的锚定点。系泊浮标允许船只系泊,而无需抛锚,这在不适合抛锚或会破坏环境的区域尤其有用。
仪器化浮标 配备了传感器,用于测量温度、波高、风速和大气压力等环境条件。这些浮标为天气预报、气候研究和海洋学研究提供有价值的数据。
一些浮标充当平台,用于收集和传输来自水或海底的实时数据,通常用于科学研究、环境监测和军事应用。
在商业捕鱼中,浮标标记陷阱或渔网的位置。 它们还有助于水产养殖,标记水下养殖场的位置。
浮标还可以标记指定的区域,例如禁止抛锚区、禁止捕鱼区或游泳区,从而帮助执行水上法规。
在所有情况下,浮标对于确保安全、促进海洋活动和支持科学研究都至关重要。
什么是浮力?
浮力是流体(如水或空气)对浸没在其中的物体的重量所施加的力。如果物体的密度小于流体的密度,它允许物体漂浮或上升到表面。浮力产生的原因是作用在物体浸没部分上的压力差异——在较低深度施加的压力较大,从而产生向上的力。
阿基米德原理描述了浮力原理,即物体所受到的向上浮力等于该物体所排开流体的重量。如果浮力大于物体的重量,物体就会漂浮;如果浮力小于物体的重量,物体就会下沉。从船舶工程(设计船舶和潜艇)到浮标等漂浮设备的功能,浮力在许多领域都至关重要。
什么是 ROV?
ROV 或遥控潜水器是一种无人水下机器人,设计用于在人类潜水员无法进入的过深、危险或其他无法进入的环境中运行。ROV 广泛应用于海洋工业,如海上石油和天然气、科学研究、环境监测和海军行动。与按照预编程路径独立运行的自主水下航行器 (AUV) 不同,ROV 通常通过脐带电缆连接到水面船只,该电缆提供电力、通信和控制信号。此系绳允许水面的人工操作员实时驾驶车辆,从而提供精确的操纵、监控和控制船载传感器和机械手。
ROV 配备了各种仪器,具体取决于其任务。它们通常携带用于目视检查的高清摄像机、用于测绘和导航的声纳系统以及用于与海底物体交互的机械臂。高级型号可能包括专用传感器,如环境探测器、磁力计和惯性导航系统 (INS) 以在具有挑战性的水下条件下保持精确定位。由于 GPS/GNSS 信号无法穿透水,ROV 依靠声学定位系统、多普勒计程仪 (DVL)、压力传感器和惯性导航的组合来估计其相对于水面船只或固定参考点的位置。用于海底建造或科学研究的高精度 ROV 通常集成战术级 IMU,以确保在扩展操作中达到厘米级的精度,即使在声学覆盖范围较差的区域也是如此。
ROV 的设计高度模块化,允许根据任务要求连接不同的有效载荷。小型观测级 ROV 重量轻且便携,适用于简单的目视检查,而工作级 ROV 则大得多,能够执行重型任务,如海底建造、管道维修或样本采集。ROV 提供无与伦比的水下环境访问,扩展了人类能力,并能够在其他情况下无法实现的深度和持续时间内进行操作。从本质上讲,ROV 既是一种通用的勘探工具,也是一个用于执行复杂水下任务的精确平台,弥合了人类监督和远程机器人能力之间的差距。
