Marine Technology integra INS/GNSS da SBG em seu USV HydroDron
Nosso cliente, Marine Technology, apresentou seu novo navio não tripulado hidrográfico na BaltExpo equipado com nosso INS Ekinox-D.
"O Ekinox-D é o INS/GNSS RTK perfeito para USV, pois combina GNSS de nível de pesquisa em um formato muito compacto." | Marine Technology

A Tecnologia Marinha apresentou o HydroDron, o primeiro veículo hidrográfico autônomo não tripulado na Polônia, na Baltexpo 2019. O projeto recém-concluído foi co-financiado pelo Centro Nacional de Pesquisa e Desenvolvimento e foi premiado na competição Baltexpo Golden Anchor 2019.

HydroDron Permite Levantamentos em Águas Inacessíveis
HydroDron é um catamarã não tripulado feito de material leve e durável, com um sistema de casco duplo (4m de comprimento e 2m de largura).
A parte do motor, equipada com dois motores elétricos que funcionam independentemente um do outro, proporciona velocidade e manobrabilidade adequadas, atingindo uma velocidade máxima de mais de 10 nós.
Esta plataforma flutuante autônoma e controlada remotamente, dedicada a medições hidrográficas em águas limitadas, é caracterizada pela mobilidade.
É possível transportá-la para a área da missão em um reboque de carro ou em uma embarcação de superfície maior e lançá-la a partir do reboque da praia, costa, cais, plataforma ou embarcação de superfície.
O HydroDron opera em águas inacessíveis ou difíceis para unidades tripuladas maiores, tornando seu uso impossível ou não lucrativo.
Um VANT totalmente equipado para hidrografia
O desenvolvimento da navegação autônoma da plataforma e dos sistemas automáticos de hidrografia 3D representa uma melhoria significativa da plataforma de superfície multiuso controlada remotamente da Marine Technology para operação em áreas portuárias e outras áreas restritas.
A plataforma agora poderá realizar missões batimétricas, de sonar e outras missões de medição em um modo totalmente autônomo, implementando o planejamento adaptativo de trajetória e a análise 3D automática de dados de medição da situação quase em tempo real ao redor da plataforma.
Equipamento HydroDron
A HydroDron integra uma ampla gama de equipamentos de medição para fornecer uma variedade de variantes diferentes:
- Sistema batimétrico e de sonar integrado 3DSS-DX-450 da Ping DSP
- Computador industrial para aquisição de dados Getac S410 (o principal elemento da estação hidrográfica)
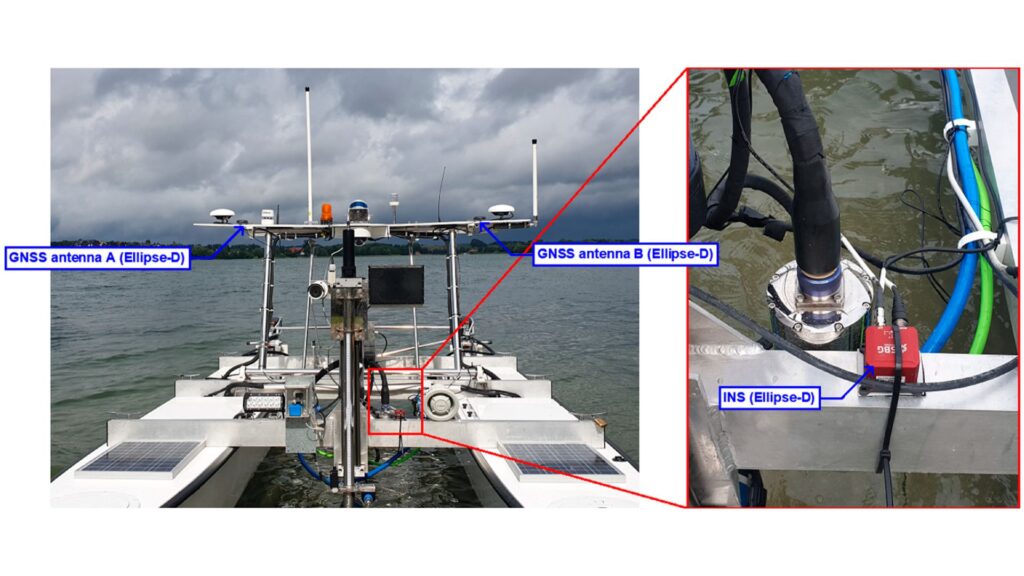
- Sistema de Navegação Inercial de Antena Dupla Externa Ekinox2-D da SBG Systems
- Sonar de feixe único e dupla frequência HydroBox HD da Syqwest
- Sonar monofeixe de alta frequência Echologger EU400
- LiDAR PUCK VLP-16 da Velodyne
Um sistema de sensores monitora a plataforma e seus arredores para aumentar a consciência situacional. Além disso, inclui duas sondas verticais, uma por casco, duas câmeras de vídeo e uma estação meteorológica. Além disso, o sistema registra dados de navegação, vídeo de ambas as câmeras, condições climáticas, tensão da bateria e profundidades de flutuação. Além disso, o radar e dois telêmetros a laser na proa e na popa suportam o sistema anticolisão da unidade.

A estação costeira recebe dados de navegação, gerenciados por dois consoles:
- um console de navegação
- um hidrográfico com um computador Getac.
O software Hypack garante medições hidrográficas, desde o planejamento do trabalho até o desenvolvimento do produto final. Os dados hidrográficos da sonda multifeixe e do LiDAR são registrados a bordo de computadores industriais.
O Sistema de Navegação Inercial Ekinox-D
O Ekinox-D Dual Antenna INS compacto da SBG Systems integra uma IMU de nível topográfico com um receptor GNSS RTK de antena dupla. Além disso, este INS/GNSS avançado fornece orientação, ondulação e precisão de posicionamento em nível de centímetro. Seu tamanho pequeno, baixo peso e invólucro IP68 robusto o tornam ideal para aplicações com restrição de espaço, como USVs. Além disso, os sensores Ekinox apresentam um registrador de dados de 8 GB para análise pós-operação ou pós-processamento.
Além disso, o sistema inclui uma interface web fácil de usar para operação simplificada. Os dados deste sensor inercial também podem ser pós-processados com o software PPK interno da SBG, o Qinertia.
Finalmente, o Qinertia aprimora o desempenho do SBG INS processando dados inerciais com observáveis GNSS brutos. Ele também fornece correções RTK offline de mais de 8.000 estações base em 164 países, sempre mantidas atualizadas.


Ekinox-D
Ekinox-D é um Sistema de Navegação Inercial completo com receptor RTK GNSS integrado, ideal para aplicações onde o espaço é crítico.
Este avançado INS/GNSS vem com uma ou duas antenas e fornece orientação, ondulação e posição em nível de centímetro.

Solicite uma cotação para o Ekinox-D
Você tem perguntas?
Bem-vindo à nossa seção de FAQ! Aqui, você encontrará respostas para as perguntas mais comuns sobre nossos aplicativos apresentados. Além disso, se você não encontrar a resposta que precisa, entre em contato conosco diretamente para obter assistência.
O que são sensores de medição de ondas?
Os sensores de medição de ondulação são ferramentas essenciais para entender a dinâmica oceânica e melhorar a segurança e a eficiência nas operações marítimas. Ao fornecer dados precisos e oportunos sobre as condições de ondulação, eles ajudam a informar as decisões em vários setores, desde transporte marítimo e navegação até conservação ambiental. As boias de ondulação são dispositivos flutuantes equipados com sensores para medir parâmetros de ondulação, como altura, período e direção.
Eles normalmente usam acelerômetros ou giroscópios para detectar o movimento das ondas (por exemplo, período da onda) e podem transmitir dados em tempo real para instalações em terra para análise.
O que é levantamento hidrográfico?
O levantamento hidrográfico é o processo de medição e mapeamento de características físicas de corpos d'água, incluindo oceanos, rios, lagos e áreas costeiras. Envolve a coleta de dados relacionados à profundidade, forma e contornos do fundo do mar (mapeamento do fundo do mar), bem como a localização de objetos submersos, perigos à navegação e outras características subaquáticas (por exemplo, fossas oceânicas). O levantamento hidrográfico é crucial para várias aplicações, incluindo segurança da navegação, gerenciamento costeiro e levantamento costeiro, construção e monitoramento ambiental.
O levantamento hidrográfico envolve vários componentes-chave, começando com a batimetria, que mede a profundidade da água e a topografia do fundo do mar usando sistemas de sonar, como ecobatímetros de feixe único ou multifeixe, que enviam pulsos sonoros para o fundo do mar e medem o tempo de retorno do eco.
O posicionamento preciso é fundamental, alcançado através de Sistemas Globais de Navegação por Satélite (GNSS) e Sistemas de Navegação Inercial (INS) para vincular as medições de profundidade a coordenadas geográficas precisas. Além disso, dados da coluna de água, como temperatura, salinidade e correntes, são medidos, e dados geofísicos são coletados para detectar objetos subaquáticos, obstáculos ou perigos usando ferramentas como sonar de varredura lateral e magnetômetros.
O que é batimetria?
Batimetria é o estudo e a medição da profundidade e forma do terreno subaquático, com foco principal no mapeamento do leito marinho e outras paisagens submersas. É o equivalente subaquático da topografia, fornecendo informações detalhadas sobre as características subaquáticas de oceanos, mares, lagos e rios. A batimetria desempenha um papel crucial em várias aplicações, incluindo navegação, construção marítima, exploração de recursos e estudos ambientais.
As técnicas batimétricas modernas dependem de sistemas de sonar, como ecobatímetros de feixe único e multifeixe, que usam ondas sonoras para medir a profundidade da água. Esses dispositivos enviam pulsos sonoros em direção ao fundo do mar e registram o tempo que os ecos levam para retornar, calculando a profundidade com base na velocidade do som na água. Os ecobatímetros multifeixe, em particular, permitem que amplas faixas do fundo do mar sejam mapeadas de uma só vez, fornecendo representações altamente detalhadas e precisas do fundo do mar. Frequentemente, uma solução RTK + INS é associada para criar representações batimétricas 3D do fundo do mar com posicionamento preciso.
Os dados batimétricos são essenciais para a criação de cartas náuticas, que ajudam a guiar as embarcações com segurança, identificando possíveis perigos subaquáticos, como rochas submersas, destroços e bancos de areia. Também desempenha um papel vital na pesquisa científica, ajudando os pesquisadores a entender as características geológicas subaquáticas, as correntes oceânicas e os ecossistemas marinhos.
Para que serve uma boia?
Uma boia é um dispositivo flutuante usado principalmente em ambientes marítimos e aquáticos para vários propósitos importantes. As boias são frequentemente colocadas em locais específicos para marcar passagens seguras, canais ou áreas perigosas em corpos d'água. Elas guiam navios e embarcações, ajudando-os a evitar pontos perigosos como rochas, águas rasas ou destroços.
Eles são usados como pontos de ancoragem para embarcações. As boias de amarração permitem que os barcos se amarrem sem ter que lançar âncora, o que pode ser especialmente útil em áreas onde a ancoragem é impraticável ou prejudicial ao meio ambiente.
As boias instrumentadas são equipadas com sensores para medir condições ambientais como temperatura, altura das ondas, velocidade do vento e pressão atmosférica. Essas boias fornecem dados valiosos para previsão do tempo, pesquisa climática e estudos oceanográficos.
Algumas boias atuam como plataformas para coletar e transmitir dados em tempo real da água ou do leito marinho, frequentemente utilizadas em pesquisa científica, monitoramento ambiental e aplicações militares.
Na pesca comercial, as boias marcam a localização de armadilhas ou redes. Elas também ajudam na aquicultura, marcando os locais de fazendas subaquáticas.
As boias também podem marcar áreas designadas, como zonas de não ancoragem, zonas de não pesca ou áreas de natação, ajudando a aplicar regulamentos na água.
Em todos os casos, as boias são essenciais para garantir a segurança, facilitar as atividades marítimas e apoiar a pesquisa científica.
O que é flutuabilidade?
A flutuabilidade é a força exercida por um fluido (como água ou ar) que se opõe ao peso de um objeto submerso nele. Ela permite que os objetos flutuem ou subam à superfície se sua densidade for menor que a do fluido. A flutuabilidade ocorre devido à diferença de pressão exercida nas porções submersas do objeto—uma pressão maior é aplicada em profundidades menores, criando uma força ascendente.
O princípio da flutuabilidade é descrito pelo princípio de Arquimedes, que afirma que a força de flutuação ascendente sobre um objeto é igual ao peso do fluido deslocado pelo objeto. Se a força de flutuação for maior que o peso do objeto, ele flutuará; se for menor, o objeto afundará. A flutuabilidade é essencial em muitos campos, desde a engenharia naval (projetando navios e submarinos) até a funcionalidade de dispositivos flutuantes, como bóias.
O que é um ROV?
ROV, ou Veículo Operado Remotamente, é um robô subaquático não tripulado projetado para operar em ambientes que são muito profundos, perigosos ou inacessíveis para mergulhadores humanos. Os ROVs são amplamente utilizados em indústrias marítimas, como petróleo e gás offshore, pesquisa científica, monitoramento ambiental e operações navais. Ao contrário dos veículos subaquáticos autônomos (AUVs), que operam independentemente seguindo caminhos pré-programados, os ROVs são normalmente conectados a uma embarcação de superfície por meio de um cabo umbilical que fornece energia, comunicação e sinais de controle. Este cabo permite que um operador humano na superfície pilote o veículo em tempo real, proporcionando manobras precisas, monitoramento e controle de sensores e manipuladores a bordo.
Os ROVs são equipados com uma variedade de instrumentos, dependendo de sua missão. Eles normalmente carregam câmeras de alta definição para inspeção visual, sistemas de sonar para mapeamento e navegação e braços manipuladores para interagir com objetos no leito marinho. Modelos avançados podem incluir sensores especializados, como sondas ambientais, magnetômetros e sistemas de navegação inercial (INS) para manter o posicionamento preciso em condições subaquáticas desafiadoras. Como os sinais de GPS/GNSS não conseguem penetrar na água, os ROVs dependem de uma combinação de sistemas de posicionamento acústico, Doppler Velocity Logs (DVLs), sensores de pressão e navegação inercial para estimar sua posição em relação à embarcação de superfície ou a um ponto de referência fixo. ROVs de alta precisão usados em construção submarina ou pesquisa científica geralmente integram IMUs de nível tático para garantir precisão em nível de centímetro em operações prolongadas, mesmo em áreas com cobertura acústica ruim.
O design de um ROV é altamente modular, permitindo que diferentes cargas úteis sejam acopladas dependendo dos requisitos da missão. ROVs pequenos da classe de observação são leves e portáteis, destinados a inspeções visuais simples, enquanto os ROVs da classe de trabalho são muito maiores, capazes de tarefas pesadas, como construção submarina, reparo de dutos ou coleta de amostras. Os ROVs fornecem acesso incomparável a ambientes subaquáticos, ampliando as capacidades humanas e permitindo operações em profundidades e durações que seriam impossíveis de outra forma. Em essência, um ROV é tanto uma ferramenta de exploração versátil quanto uma plataforma de precisão para executar missões subaquáticas complexas, preenchendo a lacuna entre a supervisão humana e a capacidade robótica remota.
