Marine Technology intègre les systèmes INS/GNSS de SBG dans leur USV HydroDron
Notre client, Marine Technology, a présenté son tout nouveau navire hydrographique sans pilote à BaltExpo, équipé de notre INS Ekinox-D.
“L'Ekinox-D est l'INS/GNSS RTK parfait pour les USV, car il combine un GNSS de qualité topographique dans un format très compact.” | Marine Technology

Marine Technology a présenté HydroDron, le premier navire hydrographique autonome sans équipage en Pologne, au Baltexpo 2019. Le projet récemment achevé a été cofinancé par le Centre national de recherche et de développement et a été récompensé lors du concours Baltexpo Golden Anchor 2019.

HydroDron permet de réaliser des levés dans des eaux inaccessibles
HydroDron est un catamaran autonome fabriqué dans un matériau léger et durable, doté d'un système à double coque (4 m de long et 2 m de large).
La partie moteur, équipée de deux moteurs électriques fonctionnant indépendamment l'un de l'autre, assure une vitesse et une maniabilité adéquates, atteignant une vitesse maximale de plus de 10 nœuds.
Cette plateforme flottante autonome et télécommandée, dédiée aux mesures hydrographiques en eaux limitées, se caractérise par sa mobilité.
Il est possible de la transporter dans la zone de mission sur une remorque de voiture ou un plus grand navire de surface et de la lancer depuis la remorque depuis la plage, le rivage, le quai, la plateforme ou le navire de surface.
HydroDron opère dans des eaux inaccessibles ou difficiles pour les grandes unités habitées, rendant leur utilisation impossible ou non rentable.
Un USV entièrement équipé pour l'hydrographie
Le développement des systèmes de navigation autonome et d'hydrographie 3D automatique de la plateforme représente une amélioration significative de la plateforme de surface polyvalente télécommandée de Marine Technology pour les opérations dans les zones portuaires et autres zones réglementées.
La plateforme sera désormais en mesure d'effectuer des missions bathymétriques, sonar et autres missions de mesure en mode entièrement autonome, en mettant en œuvre une planification de trajectoire adaptative et une analyse 3D automatique des données de mesure de la situation en temps quasi réel autour de la plateforme.
Équipement HydroDron
HydroDron intègre une large gamme d'équipements de mesure afin de fournir une multitude de variantes différentes :
- Système bathymétrique et sonar intégré 3DSS-DX-450 de Ping DSP
- Ordinateur industriel pour l'acquisition de données Getac S410 (l'élément principal de la station hydrographique)
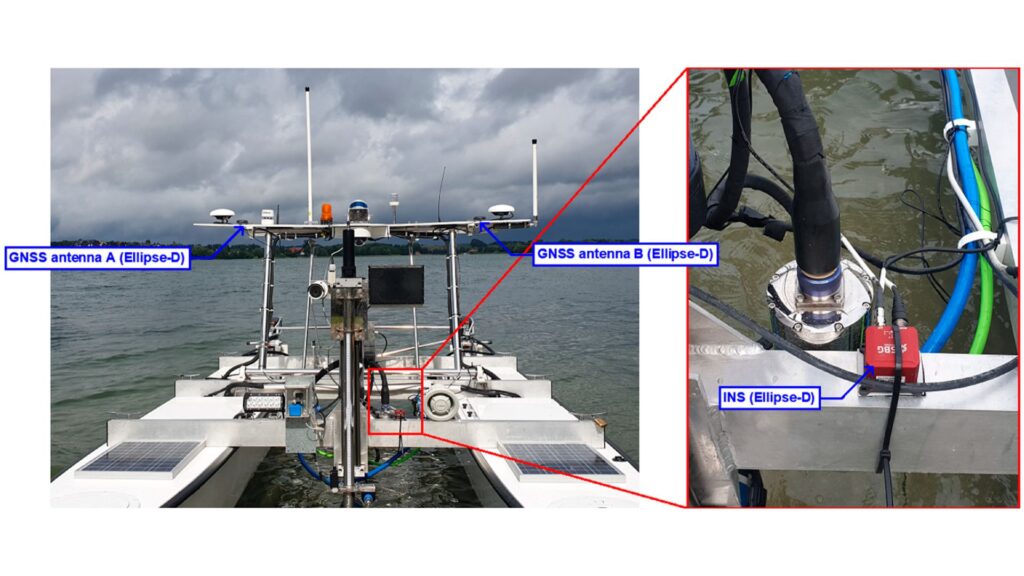
- Système de navigation inertielle à double antenne externe Ekinox2-D de SBG Systems
- Sondeur monofaisceau à double fréquence HydroBox HD de Syqwest
- Sondeur monofaisceau haute fréquence Echologger EU400
- LiDAR PUCK VLP-16 par Velodyne
Un système de capteurs surveille la plateforme et son environnement afin d'améliorer la connaissance de la situation. De plus, il comprend deux sondes verticales, une par coque, deux caméras vidéo et une station météorologique. De plus, le système enregistre les données de navigation, la vidéo des deux caméras, les conditions météorologiques, la tension de la batterie et la profondeur des flotteurs. De plus, un radar et deux télémètres laser à l'avant et à l'arrière soutiennent le système anti-collision de l'unité.

La station à terre reçoit les données de navigation, gérées par deux consoles :
- une console de navigation
- un hydrographique avec un ordinateur Getac.
Le logiciel Hypack assure les mesures hydrographiques, de la planification du travail à l'élaboration du produit final. Les données hydrographiques provenant de la sonde multifaisceaux et du LiDAR sont enregistrées à bord d'ordinateurs industriels.
Le système de navigation inertielle Ekinox-D
L'INS compact Ekinox-D Dual Antenna de SBG Systems intègre une IMU de qualité topographique avec un récepteur GNSS RTK à double antenne. De plus, cet INS/GNSS avancé fournit l'orientation, le pilonnement et une précision de positionnement au centimètre près. Sa petite taille, son faible poids et son boîtier robuste IP68 le rendent idéal pour les applications à espace contraint telles que les USV. De plus, les capteurs Ekinox intègrent un enregistreur de données de 8 Go pour l'analyse post-opération ou le post-traitement.
Par ailleurs, le système comprend une interface web conviviale pour une utilisation simplifiée. Les données de ce capteur inertiel peuvent également être post-traitées avec le logiciel PPK interne de SBG, Qinertia.
Enfin, Qinertia améliore les performances des INS SBG en traitant les données inertielles avec les observables GNSS brutes. Il fournit également des corrections RTK hors ligne provenant de plus de 8 000 stations de base dans 164 pays, toujours tenues à jour.


Ekinox-D
Ekinox-D est un système de navigation inertielle tout-en-un avec récepteur RTK GNSS intégré, idéal pour les applications où l'espace est critique.
Cet INS/GNSS avancé est livré avec une ou deux antennes et fournit l'orientation, le pilonnement et une position au centimètre près.

Demander un devis pour l'Ekinox-D
Vous avez des questions ?
Bienvenue dans notre section FAQ ! Vous trouverez ici les réponses aux questions les plus fréquemment posées sur nos applications présentées. De plus, si vous ne trouvez pas la réponse dont vous avez besoin, veuillez nous contacter directement pour obtenir de l'aide.
Que sont les capteurs de mesure de vagues ?
Les capteurs de mesure des vagues sont des outils essentiels pour comprendre la dynamique des océans et améliorer la sécurité et l'efficacité des opérations maritimes. En fournissant des données précises et actualisées sur les conditions de vagues, ils aident à éclairer les décisions dans divers secteurs, du transport maritime et de la navigation à la conservation de l'environnement. Les bouées de vagues sont des dispositifs flottants équipés de capteurs pour mesurer les paramètres des vagues tels que la hauteur, la période et la direction.
Ils utilisent généralement des accéléromètres ou des gyroscopes pour détecter le mouvement des vagues (par exemple, la période des vagues) et peuvent transmettre des données en temps réel aux installations terrestres pour analyse.
Qu'est-ce que la topographie hydrographique ?
Le levé hydrographique est le processus de mesure et de cartographie des caractéristiques physiques des étendues d'eau, y compris les océans, les rivières, les lacs et les zones côtières. Il implique la collecte de données relatives à la profondeur, à la forme et aux contours du fond marin (cartographie du fond marin), ainsi qu'à la localisation des objets submergés, des dangers pour la navigation et d'autres caractéristiques sous-marines (par exemple, les fosses marines). Le levé hydrographique est essentiel pour diverses applications, notamment la sécurité de la navigation, la gestion côtière et le levé côtier, la construction et la surveillance environnementale.
Le levé hydrographique comprend plusieurs éléments clés, à commencer par la bathymétrie, qui mesure la profondeur de l'eau et la topographie du fond marin à l'aide de systèmes de sonar tels que les sondeurs mono-faisceau ou multi-faisceaux qui envoient des impulsions sonores au fond marin et mesurent le temps de retour de l'écho.
Un positionnement précis est essentiel, obtenu grâce aux systèmes mondiaux de navigation par satellite (GNSS) et aux systèmes de navigation inertielle (INS) pour relier les mesures de profondeur à des coordonnées géographiques précises. De plus, les données de la colonne d'eau, telles que la température, la salinité et les courants, sont mesurées, et des données géophysiques sont collectées pour détecter les objets, les obstacles ou les dangers sous-marins à l'aide d'outils tels que le sonar à balayage latéral et les magnétomètres.
Qu'est-ce que la bathymétrie ?
La bathymétrie est l'étude et la mesure de la profondeur et de la forme du relief sous-marin, principalement axée sur la cartographie des fonds marins et autres paysages submergés. Il s'agit de l'équivalent sous-marin de la topographie, fournissant des informations détaillées sur les caractéristiques sous-marines des océans, des mers, des lacs et des rivières. La bathymétrie joue un rôle crucial dans diverses applications, notamment la navigation, la construction maritime, l'exploration des ressources et les études environnementales.
Les techniques bathymétriques modernes reposent sur des systèmes sonar, tels que les sondeurs mono-faisceau et multi-faisceaux, qui utilisent des ondes sonores pour mesurer la profondeur de l'eau. Ces dispositifs envoient des Pulse sonores vers le fond marin et enregistrent le temps qu'il faut aux échos pour revenir, calculant ainsi la profondeur en fonction de la vitesse du son dans l'eau. Les sondeurs multi-faisceaux, en particulier, permettent de cartographier de larges bandes du fond marin en une seule fois, fournissant ainsi des représentations très détaillées et précises du fond marin. Fréquemment, une solution RTK + INS est associée pour créer des représentations bathymétriques 3D du fond marin positionnées avec précision.
Les données bathymétriques sont essentielles à la création de cartes marines, qui aident à guider les navires en toute sécurité en identifiant les dangers sous-marins potentiels tels que les roches submergées, les épaves et les bancs de sable. Elles jouent également un rôle essentiel dans la recherche scientifique, en aidant les chercheurs à comprendre les caractéristiques géologiques sous-marines, les courants océaniques et les écosystèmes marins.
À quoi sert une bouée ?
Une bouée est un dispositif flottant principalement utilisé dans les environnements maritimes et aquatiques à plusieurs fins essentielles. Les bouées sont souvent placées à des endroits spécifiques pour marquer les passages sûrs, les chenaux ou les zones dangereuses dans les plans d'eau. Elles guident les navires et les embarcations, les aidant à éviter les endroits dangereux comme les rochers, les eaux peu profondes ou les épaves.
Elles sont utilisées comme points d'ancrage pour les navires. Les bouées d'amarrage permettent aux bateaux de s'amarrer sans avoir à jeter l'ancre, ce qui peut être particulièrement utile dans les zones où l'ancrage est peu pratique ou dommageable pour l'environnement.
Les bouées instrumentées sont équipées de capteurs pour mesurer les conditions environnementales telles que la température, la hauteur des vagues, la vitesse du vent et la pression atmosphérique. Ces bouées fournissent des données précieuses pour les prévisions météorologiques, la recherche climatique et les études océanographiques.
Certaines bouées servent de plateformes pour la collecte et la transmission de données en temps réel provenant de l'eau ou du fond marin, souvent utilisées dans la recherche scientifique, la surveillance environnementale et les applications militaires.
Dans le domaine de la pêche commerciale, les bouées indiquent l'emplacement des pièges ou des filets. Elles sont également utiles en aquaculture, en marquant l'emplacement des fermes sous-marines.
Les bouées peuvent également marquer des zones désignées telles que les zones de non-mouillage, les zones de non-pêche ou les zones de baignade, ce qui contribue à faire respecter les réglementations sur l'eau.
Dans tous les cas, les bouées sont essentielles pour assurer la sécurité, faciliter les activités maritimes et soutenir la recherche scientifique.
Qu'est-ce que la flottabilité ?
La flottabilité est la force exercée par un fluide (tel que l'eau ou l'air) qui s'oppose au poids d'un objet immergé dans celui-ci. Elle permet aux objets de flotter ou de remonter à la surface si leur densité est inférieure à celle du fluide. La flottabilité se produit en raison de la différence de pression exercée sur les parties immergées de l'objet : une pression plus importante est appliquée aux profondeurs inférieures, créant ainsi une force ascendante.
Le principe de la flottabilité est décrit par le principe d'Archimède, qui stipule que la force de flottabilité ascendante sur un objet est égale au poids du fluide déplacé par l'objet. Si la force de flottabilité est supérieure au poids de l'objet, il flotte ; si elle est inférieure, l'objet coule. La flottabilité est essentielle dans de nombreux domaines, de l'ingénierie marine (conception de navires et de sous-marins) à la fonctionnalité des dispositifs flottants tels que les bouées.
Qu'est-ce qu'un ROV ?
Un ROV, ou Remotely Operated Vehicle (véhicule sous-marin téléopéré), est un robot sous-marin sans équipage conçu pour opérer dans des environnements trop profonds, dangereux ou autrement inaccessibles aux plongeurs humains. Les ROV sont largement utilisés dans les industries marines telles que l'exploration pétrolière et gazière offshore, la recherche scientifique, la surveillance environnementale et les opérations navales. Contrairement aux véhicules sous-marins autonomes (AUV), qui fonctionnent de manière indépendante en suivant des trajectoires préprogrammées, les ROV sont généralement reliés à un navire de surface par un câble ombilical qui fournit l'alimentation électrique, la communication et les signaux de commande. Cette liaison permet à un opérateur humain en surface de piloter le véhicule en temps réel, assurant une manœuvre précise, une surveillance et un contrôle des capteurs et manipulateurs embarqués.
Les ROV sont équipés d'une variété d'instruments selon leur mission. Ils embarquent généralement des caméras haute définition pour l'inspection visuelle, des systèmes sonar pour la cartographie et la navigation, ainsi que des bras manipulateurs pour interagir avec les objets sur le fond marin. Les modèles avancés peuvent inclure des capteurs spécialisés tels que des sondes environnementales, des magnétomètres et des systèmes de navigation inertielle (INS) pour maintenir un positionnement précis dans des conditions sous-marines difficiles. Étant donné que les signaux GPS/GNSS ne peuvent pas pénétrer l'eau, les ROV s'appuient sur une combinaison de systèmes de positionnement acoustique, de lochs Doppler (DVL), de capteurs de pression et de navigation inertielle pour estimer leur position par rapport au navire de surface ou à un point de référence fixe. Les ROV de haute précision utilisés dans la construction sous-marine ou la recherche scientifique intègrent souvent des IMU de qualité tactique pour garantir une précision centimétrique sur des opérations prolongées, même dans les zones à faible couverture acoustique.
La conception d'un ROV est hautement modulaire, permettant l'intégration de différentes charges utiles en fonction des exigences de la mission. Les petits ROV de classe observation sont légers et portables, destinés à de simples inspections visuelles, tandis que les ROV de classe travail sont beaucoup plus grands, capables de tâches lourdes telles que la construction sous-marine, la réparation de pipelines ou la collecte d'échantillons. Les ROV offrent un accès inégalé aux environnements sous-marins, étendant les capacités humaines et permettant des opérations à des profondeurs et des durées qui seraient autrement impossibles. En substance, un ROV est à la fois un outil d'exploration polyvalent et une plateforme de précision pour l'exécution de missions sous-marines complexes, comblant le fossé entre la supervision humaine et la capacité robotique à distance.
