Компанія Marine Technology інтегруєGNSS від SBGGNSS свій безпілотний водний апарат HydroDron
Наш клієнт, компанія Marine Technology, представила на виставці BaltExpo свій абсолютно новий безпілотний гідрографічний судно, оснащене нашою INS Ekinox.
Ekinox — це ідеальна система RTKGNSS безпілотних суден (USV), оскільки вона поєднує GNSS геодезичного класу GNSS надзвичайно компактний корпус». | Marine Technology

Компанія «Marine Technology» представила на виставці Baltexpo 2019 «HydroDron» — перший в Польщі автономний безпілотний гідрографічний судно. Цей нещодавно завершений проект був співфінансований Національним центром досліджень і розвитку та отримав нагороду в рамках конкурсу «Baltexpo Golden Anchor 2019».

HydroDron дозволяє проводити гідрографічні зйомки у важкодоступних водах
HydroDron — це безпілотний катамаран, виготовлений із легкого та міцного матеріалу, з подвійним корпусом (довжиною 4 м і шириною 2 м).
Силова установка, оснащена двома електродвигунами, що працюють незалежно один від одного, забезпечує достатню швидкість і маневреність, дозволяючи розвивати максимальну швидкість понад 10 вузлів.
Ця автономна та дистанційно керована плавуча платформа, призначена для гідрографічних вимірювань у обмежених акваторіях, відрізняється високою мобільністю.
Її можна транспортувати в район виконання завдань на автомобільній причепі або більшому надводному судні та спускати на воду з причепа з пляжу, берега, причалу, платформи або надводного судна.
HydroDron працює у водах, недоступних або важкодоступних для більших пілотованих одиниць, що робить їх використання неможливим або невигідним.
Судно без екіпажу, повністю оснащене для гідрографічних робіт
Розробка систем автономної навігації та автоматичної 3D-гідрографічної зйомки для цієї платформи є значним вдосконаленням дистанційно керованої багатоцільової надводної платформи компанії Marine Technology, призначеної для роботи в портових зонах та інших обмежених районах.
Відтепер платформа зможе виконувати батиметричні, гідроакустичні та інші вимірювальні завдання в повністю автономному режимі, використовуючи адаптивне планування траєкторії та автоматичний 3D-аналіз даних про ситуацію навколо платформи, що надходять майже в режимі реального часу.
Обладнання HydroDron
HydroDron об'єднує широкий спектр вимірювального обладнання, щоб запропонувати безліч різних варіантів:
- Інтегрована батиметрична та гідроакустична система 3DSS-DX-450 від Ping DSP
- Промисловий комп'ютер для збору даних Getac S410 (основний елемент гідрографічної станції)
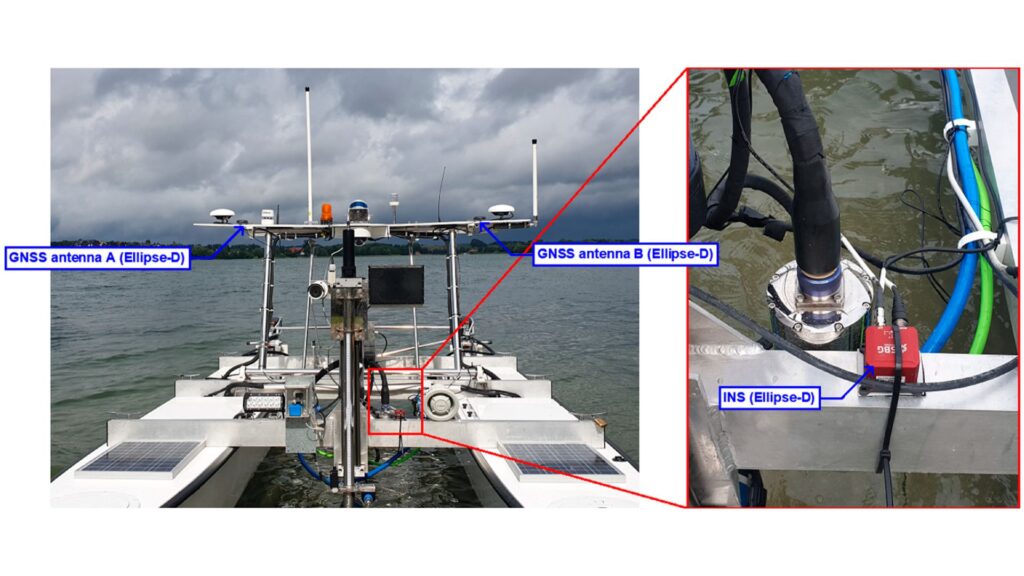
- Зовнішня інерційна навігаційна система з двома антенами Ekinox2-D від SBG Systems
- Однопроменевий двочастотний гідролокатор HydroBox HD від компанії Syqwest
- Високочастотний однопроменевий гідролокатор Echologger EU400
- LiDAR PUCK VLP-16 від Velodyne
Система датчиків здійснює моніторинг платформи та її околиць для покращення орієнтування в обстановці. Крім того, вона включає два вертикальні датчики (по одному на кожному корпусі), дві відеокамери та метеостанцію. Також система реєструє навігаційні дані, відео з обох камер, погодні умови, напругу акумулятора та глибину занурення поплавців. Крім того, система протизіткнення судна підтримується радаром та двома лазерними далекомірами, розташованими на носі та кормі.

Берегова станція отримує навігаційні дані, управління якими здійснюється за допомогою двох пультів:
- навігаційна консоль
- гідрографічна з використанням комп'ютера Getac.
Програмне забезпечення Hypack забезпечує проведення гідрографічних вимірювань — від планування робіт до створення кінцевого продукту. Гідрографічні дані, отримані за допомогою багатопроменевого ехолота та LiDAR, записуються на бортових промислових комп’ютерах.
Інерційна навігаційна система Ekinox
Компактна система INS Ekinox Dual Antenna INS SBG Systems інерційний вимірювальний блок IMU геодезичного класу IMU GNSS IMU двома антенами. Більше того, ця сучаснаGNSS орієнтацію, heave та точність позиціонування на рівні сантиметрів. Невеликі розміри, мала вага та міцний корпус із захистом IP68 роблять її ідеальною для застосувань з обмеженим простором, таких як безпілотні надводні судна (USV). Крім того, Ekinox оснащені реєстратором даних на 8 ГБ для аналізу або постобробки після операції.
Також система включає простий у використанні веб-інтерфейс для спрощення експлуатації. Дані з цього інерційного датчика також можна обробляти за допомогою власного програмного забезпечення SBG для PPK, Qinertia.
Нарешті, Qinertia покращує INS SBG INS , обробляючи інерційні дані з необробленими GNSS . Вона також надає офлайн-корекції RTK від понад 8 000 базових станцій у 164 країнах, які завжди залишаються актуальними.


Ekinox-D
Ekinox — це універсальна інерційна навігаційна система з вбудованим GNSS , яка ідеально підходить для застосувань, де важливе значення має компактність.
Ця сучаснаGNSS однією або двома антенами та забезпечує визначення орієнтації, heave і координат з точністю до сантиметра.

Запитайте ціну на Ekinox
У вас є питання?
Ласкаво просимо до розділу «Часті запитання»! Тут ви знайдете відповіді на найпоширеніші запитання щодо представлених нами додатків. Крім того, якщо ви не зможете знайти потрібну відповідь, зверніться до нас безпосередньо за допомогою.
Що таке датчики вимірювання хвиль?
Датчики для вимірювання хвиль є незамінними інструментами для розуміння динаміки океану та підвищення безпеки й ефективності морських операцій. Надаючи точні й оперативні дані про стан хвиль, вони допомагають приймати обґрунтовані рішення в різних галузях — від судноплавства та навігації до охорони навколишнього середовища. Хвильові буї — це плавучі пристрої, оснащені датчиками для вимірювання таких параметрів хвиль, як висота, період і напрямок.
Зазвичай вони використовують акселерометри або гіроскопи для вимірювання хвильових коливань (наприклад, періоду хвилі) і можуть передавати дані в режимі реального часу на берегові станції для аналізу.
Що таке гідрографічна зйомка?
Гідрографічна зйомка — це процес вимірювання та картографування фізичних характеристик водних об’єктів, зокрема океанів, річок, озер та прибережних територій. Вона передбачає збір даних про глибину, форму та рельєф морського дна (картографування морського дна), а також про розташування затоплених об’єктів, навігаційних небезпек та інших підводних об’єктів (наприклад, морських траншей). Гідрографічна зйомка має вирішальне значення для різних сфер застосування, включаючи безпеку судноплавства, управління прибережними районами та їх обстеження, будівництво та моніторинг навколишнього середовища.
Гідрографічна зйомка включає в себе кілька основних компонентів, починаючи з батиметрії, яка дозволяє вимірювати глибину води та рельєф морського дна за допомогою гідроакустичних систем, таких як однопроменеві або багатопроменеві ехолоти, що надсилають звукові імпульси до морського дна та вимірюють час повернення відбитого сигналу.
Точне позиціонування має вирішальне значення; його забезпечують глобальні навігаційні супутникові системи (GNSS) та інерційні навігаційні системи (INS) для прив'язки вимірювань глибини до точних географічних координат. Крім того, вимірюються дані про водяний стовп, такі як температура, солоність та течії, а також збираються геофізичні дані для виявлення підводних об'єктів, перешкод або небезпек за допомогою таких інструментів, як гідролокатор бокового огляду та магнітометри.
Що таке батиметрія?
Батиметрія — це наука про вивчення та вимірювання глибини й форми підводного рельєфу, що зосереджується переважно на картографуванні морського дна та інших підводних ландшафтів. Це підводний аналог топографії, що дає детальне уявлення про підводні особливості океанів, морів, озер і річок. Батиметрія відіграє вирішальну роль у різних сферах застосування, зокрема в навігації, морському будівництві, розвідці ресурсів та екологічних дослідженнях.
Сучасні батиметричні методи базуються на системах гідролокації, таких як однопроменеві та багатопроменеві ехолоти, які використовують звукові хвилі для вимірювання глибини води. Ці пристрої надсилають звукові імпульси до морського дна та фіксують час, за який повертається відлуння, обчислюючи глибину на основі швидкості звуку у воді. Зокрема, багатопроменеві ехолоти дозволяють одночасно картографувати великі ділянки морського дна, забезпечуючи надзвичайно детальні та точні зображення морського дна. Часто для створення точно позиціонованих 3D-батиметричних зображень морського дна використовується INS RTK + INS .
Батиметричні дані є необхідними для створення морських карт, які допомагають суднам безпечно орієнтуватися, виявляючи потенційні підводні небезпеки, такі як затонулі скелі, затонулі кораблі та піщані мілини. Вони також відіграють важливу роль у наукових дослідженнях, допомагаючи вченим зрозуміти підводні геологічні особливості, океанічні течії та морські екосистеми.
Для чого використовується буй?
Буй — це плавучий пристрій, який переважно використовується в морських та водних середовищах для кількох основних цілей. Буї часто встановлюють у певних місцях для позначення безпечних проходів, фарватерів або небезпечних ділянок на водоймах. Вони слугують орієнтиром для кораблів і суден, допомагаючи їм оминати небезпечні місця, такі як скелі, мілини або затонулі судна.
Вони використовуються як точки швартування для суден. Швартові буї дають змогу човнам причалювати без необхідності кидати якір, що може бути особливо корисним у районах, де якірне стояння є недоцільним або шкідливим для навколишнього середовища.
Буї з вимірювальним обладнанням оснащені датчиками для вимірювання таких параметрів навколишнього середовища, як температура, висота хвиль, швидкість вітру та атмосферний тиск. Ці буї надають цінні дані для прогнозування погоди, кліматичних досліджень та океанографічних досліджень.
Деякі буї слугують платформами для збору та передачі даних у режимі реального часу з води або морського дна; їх часто використовують у наукових дослідженнях, моніторингу навколишнього середовища та військових цілях.
У промисловому рибальстві буї позначають місця розташування пасток або сіток. Вони також використовуються в аквакультурі для позначення місць розташування підводних ферм.
Буї також можуть позначати визначені ділянки, такі як зони, де заборонено кидати якір, зони, де заборонено рибалити, або місця для купання, сприяючи дотриманню правил на воді.
У будь-якому разі буї відіграють вирішальну роль у забезпеченні безпеки, сприянні морській діяльності та підтримці наукових досліджень.
Що таке плавучість?
Підйомна сила — це сила, що чиниться рідиною (наприклад, водою або повітрям) і протидіє вазі зануреного в неї предмета. Вона дозволяє предметам плавати або спливати на поверхню, якщо їхня густина менша за густину рідини. Підйомна сила виникає через різницю тиску, що чиниться на занурені частини предмета: на більшій глибині тиск вищий, що створює силу, спрямовану вгору.
Принцип плавучості описується законом Архімеда, згідно з яким сила виштовхування, що діє на об’єкт у бік поверхні, дорівнює вазі рідини, витісненої цим об’єктом. Якщо сила виштовхування перевищує вагу об’єкта, він плаватиме; якщо ж вона менша, об’єкт тоне. Плавучість відіграє важливу роль у багатьох галузях — від суднобудування (проектування кораблів і підводних човнів) до функціонування плавучих пристроїв, таких як буї.
Що таке ROV?
ROV, або дистанційно керований підводний апарат, — це безпілотний підводний робот, призначений для роботи в умовах, які є занадто глибокими, небезпечними або з інших причин недоступними для водолазів-людей. ROV широко використовуються в морських галузях, таких як видобуток нафти та газу на шельфі, наукові дослідження, моніторинг стану навколишнього середовища та військово-морські операції. На відміну від автономних підводних апаратів (AUV), які працюють самостійно, слідуючи заздалегідь запрограмованим маршрутом, ROV зазвичай прикріплені до надводного судна за допомогою шнура, що забезпечує живлення, зв'язок та передачу сигналів управління. Цей шнур дозволяє оператору на поверхні керувати апаратом у режимі реального часу, забезпечуючи точне маневрування, моніторинг та управління бортовими датчиками та маніпуляторами.
Підводні апарати (ROV) оснащуються різноманітним обладнанням залежно від завдання. Зазвичай вони мають на борту камери високої чіткості для візуального огляду, гідролокаційні системи для картографування та навігації, а також маніпулятори для взаємодії з об’єктами на морському дні. Сучасні моделі можуть бути оснащені спеціалізованими датчиками, такими як екологічні зонди, магнітометри та інерційні навігаційні системи (INS), що забезпечують точне визначення координат у складних підводних умовах. ОскількиGNSS не проникають у воду, ROV покладаються на комбінацію акустичних систем позиціонування, доплерівських логів швидкості (DVL), датчиків тиску та інерційної навігації для оцінки свого положення відносно надводного судна або фіксованої точки відліку. Високоточні ROV, що використовуються в підводному будівництві або наукових дослідженнях, часто інтегрують інерційні вимірювальні блоки (IMU) тактичного класу, щоб забезпечити точність на рівні сантиметрів під час тривалих операцій, навіть у районах зі слабким акустичним покриттям.
Конструкція ROV має виразно модульну структуру, що дозволяє встановлювати різні корисні навантаження залежно від вимог місії. Невеликі ROV спостережного класу є легкими та портативними і призначені для простих візуальних оглядів, тоді як ROV робочого класу мають значно більші розміри та здатні виконувати важкі завдання, такі як підводне будівництво, ремонт трубопроводів або відбір проб. ROV забезпечують безпрецедентний доступ до підводного середовища, розширюючи можливості людини та дозволяючи проводити операції на глибинах і протягом періодів часу, які інакше були б неможливими. По суті, ROV є як універсальним інструментом для досліджень, так і прецизійною платформою для виконання складних підводних місій, заповнюючи прогалину між людським наглядом та можливостями дистанційно керованих роботів.
