UAV-Fluganalyse mit Miniatur-Inertialsensor
Entdecken Sie die UAV-Fluganalyse für präzise Windmessungen.
„Ellipse-N wurde ausgewählt, weil es alle Anforderungen erfüllt und ein einzigartiges Gleichgewicht zwischen Genauigkeit, Größe und Gewicht bietet.“ | Dr.-Ing. Uwe Putze, Eberhard Karls Universität

Mehrzweck-Luftfahrzeug-Sensorträger UAV
MASC ist eine kleine UAV, die für die Erforschung der atmosphärischen Grenzschicht entwickelt wurde. Darüber hinaus wird sie von der Arbeitsgruppe Umweltphysik der Eberhard Karls Universität Tübingen, Deutschland, entworfen und betrieben. Das Team wählte die Ellipse-N, um die UAV-Position, die Bodengeschwindigkeit und die Lagewinkel aufzuzeichnen. Zusätzlich können Windgeschwindigkeit und -richtung durch Berücksichtigung des Luftstroms genau berechnet werden.
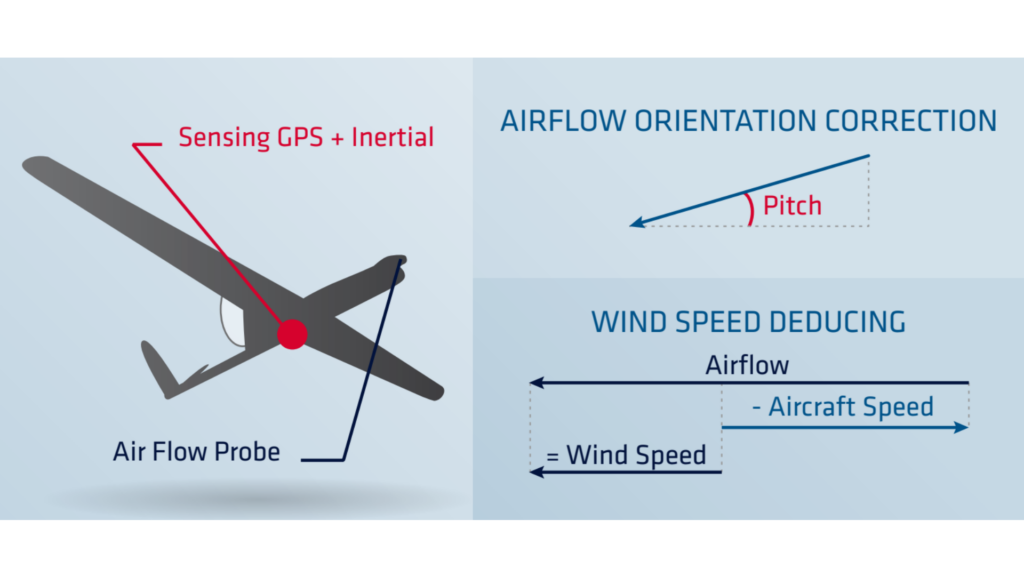
Die Windberechnung während des Fluges ist jedoch eine Herausforderung, da die Luftstromsonde eine Kompensation für das UAV-Verhalten erfordert.
Daher ist eine präzise Trägheitsmessung für eine genaue Fluganalyse unerlässlich.
Die typische Nutzlast für diese UAV ist ein meteorologisches Messsystem, das zur Berechnung turbulenter Flüsse entwickelt wurde.
Im Vergleich zu terrestrischen Systemen oder Flugzeugen ist die MASC UAV ein kostengünstiges und wertvolles Werkzeug für Forschungsarbeiten wie die Standortbewertung von Windkraftanlagen in komplexem Gelände.
„In-Flight“-Berechnung der Windgeschwindigkeit
Die Windberechnung während des Fluges stellt eine Herausforderung dar, da die eingebettete Luftstromsonde eine Kompensation für das UAV-Verhalten erfordert. Darüber hinaus werden Windgeschwindigkeit und -richtung durch Subtrahieren der UAV-Bodengeschwindigkeit und -Lage vom Luftstromvektor berechnet. Daher ist eine präzise Inertial Measurement Unit für eine genaue UAV-Fluganalyse unerlässlich.
Unser Ellipse-N: das GPS-gestützte Miniatur-INS
Turbulence plays an important role in the transport and exchange of energy in the lower atmosphere.
A high data rate is required to record these very fast fluctuations in the wind speed. “We were looking for a precise inertial measurement unit. Required specifications were an accuracy in attitude angles of <1°, and a high data output rate” declares Uwe Putze, Dr.-Ing. at the Eberhard Karls Universität Tübingen.
As the unit had to be mounted in a small unmanned aerial vehicle, small size and low weight were also important for the project. “The Ellipse-N was selected because it fulfills all the requirements and provides a unique balance of accuracy, size and weight”, adds the Project Engineer.
Die Ellipse-N ist klein und leicht und bietet mehr als nur die Messung von Lage und Kurs. Sie kombiniert Trägheitsdaten mit GPS- und Drucksensorinformationen, um eine robuste Position und eine verbesserte Höhengenauigkeit zu erzielen.
Der Bericht, der die dynamische Sensorkalibrierung über den gesamten Temperaturbereich zeigt, hat das Team noch mehr davon überzeugt, dass das System die angekündigten Spezifikationen erfüllen wird.
Ellipse-N – Hochwertige Daten
Die Ellipse-N ließ sich problemlos über eine serielle Schnittstelle in den bordeigenen Messcomputer integrieren. Darüber hinaus ermöglichte diese nahtlose Verbindung eine effiziente Datenübertragung.
Während die Luftstromsonde die Fluggeschwindigkeit und die Anstellwinkel maß, zeichnete die Ellipse-N die UAV-Position, die Bodengeschwindigkeit und die Lagewinkel auf. Zusätzlich speicherte der Computer Rohdaten zur späteren Verwendung. Darüber hinaus ermöglichte eine Telemetrieverbindung die Echtzeitanzeige auf der Bodenstation.
Durch den Einsatz dieses Sensors maß das System die Windgeschwindigkeit mit einer Genauigkeit von ±0,5 m/s über alle drei Achsen. Darüber hinaus erfasste es Geschwindigkeitsänderungen mit bis zu 20 Hz, während die Ausgaberate von 200 Hz die Notwendigkeit einer Interpolation beseitigte.


Entdecken Sie unsere Ellipse-N
Ellipse-N ist ein kompaktes und leistungsstarkes RTK Inertial Navigation System (INS) mit einem integrierten Dualband-Quad-Konstellations-GNSS-Empfänger. Es bietet Roll-, Nick-, Kurs- und Heave-Daten sowie eine zentimetergenaue GNSS-Position.
Der Ellipse-N Sensor funktioniert am besten in dynamischen Umgebungen und unter schwierigen GNSS-Bedingungen. Darüber hinaus funktioniert er auch in Anwendungen mit geringerer Dynamik mit magnetischer Kurssteuerung.

Fordern Sie ein Angebot für Ellipse-N an
Haben Sie Fragen?
Willkommen in unserem FAQ-Bereich! Hier finden Sie Antworten auf die häufigsten Fragen zu den Anwendungen, die wir vorstellen. Wenn Sie nicht finden, wonach Sie suchen, können Sie sich gerne direkt an uns wenden!
Wie steuert man Ausgangsverzögerungen im UAV-Betrieb?
Die Steuerung der Ausgabeverzögerungen bei UAV-Operationen ist entscheidend für die Gewährleistung einer reaktionsschnellen Leistung, einer präzisen Navigation und einer effektiven Kommunikation, insbesondere in Verteidigungs- oder einsatzkritischen Anwendungen.
Die Ausgabelatenz ist ein wichtiger Aspekt in Echtzeitsteuerungsanwendungen, bei denen eine höhere Ausgabelatenz die Leistung von Regelkreisen beeinträchtigen könnte. Unsere INS Embedded Software wurde entwickelt, um die Ausgabelatenz zu minimieren: Sobald Sensordaten erfasst werden, führt der Extended Kalman Filter (EKF) kleine und zeitkonstante Berechnungen durch, bevor die Ausgaben generiert werden. Typischerweise beträgt die beobachtete Ausgabeverzögerung weniger als eine Millisekunde.
Die Verarbeitungsverzögerung sollte zur Datenübertragungsverzögerung addiert werden, wenn Sie die Gesamtverzögerung erhalten möchten. Diese Übertragungsverzögerung variiert von Schnittstelle zu Schnittstelle. Beispielsweise benötigt eine 50-Byte-Nachricht, die über eine UART-Schnittstelle mit 115200 bps gesendet wird, 4 ms für die vollständige Übertragung. Erwägen Sie höhere Baudraten, um die Ausgabelatenz zu minimieren.
Verwenden UAVs GPS?
Unbemannte Luftfahrzeuge (UAVs), allgemein bekannt als Drohnen, verwenden typischerweise die Global Positioning System (GPS)-Technologie für Navigation und Positionierung.
GPS ist ein wesentlicher Bestandteil des Navigationssystems eines UAV und liefert Standortdaten in Echtzeit, die es der Drohne ermöglichen, ihre Position genau zu bestimmen und verschiedene Aufgaben auszuführen.
In den letzten Jahren wurde dieser Begriff durch einen neuen Begriff, GNSS (Global Navigation Satellite System), ersetzt. GNSS bezeichnet die allgemeine Kategorie von Satellitennavigationssystemen, die GPS und verschiedene andere Systeme umfasst. Im Gegensatz dazu ist GPS ein spezifischer Typ von GNSS, der von den Vereinigten Staaten entwickelt wurde.
Was ist UAV-Geofencing?
UAV-Geofencing ist eine virtuelle Barriere, die spezifische geografische Grenzen definiert, innerhalb derer ein unbemanntes Luftfahrzeug (UAV) operieren kann.
Diese Technologie spielt eine entscheidende Rolle bei der Erhöhung der Sicherheit und Compliance von Drohnenoperationen, insbesondere in Gebieten, in denen Flugaktivitäten Risiken für Personen, Eigentum oder eingeschränkten Luftraum darstellen können.
In Branchen wie Lieferdiensten, Bauwesen und Landwirtschaft trägt Geofencing dazu bei, dass Drohnen in sicheren und legalen Gebieten operieren, wodurch potenzielle Konflikte vermieden und die betriebliche Effizienz gesteigert werden.
Strafverfolgungs- und Rettungsdienste können Geofencing nutzen, um UAV-Einsätze bei öffentlichen Veranstaltungen oder Notfällen zu verwalten und sicherzustellen, dass Drohnen keine sensiblen Bereiche betreten.
Geofencing kann zum Schutz von Wildtieren und natürlichen Ressourcen eingesetzt werden, indem der Zugang von Drohnen zu bestimmten Lebensräumen oder Naturschutzgebieten eingeschränkt wird.
Was ist eine Nutzlast?
Eine Nutzlast bezieht sich auf alle Geräte, Vorrichtungen oder Materialien, die ein Fahrzeug (Drohne, Schiff …) mit sich führt, um seinen beabsichtigten Zweck über die Grundfunktionen hinaus zu erfüllen. Die Nutzlast ist von den Komponenten getrennt, die für den Betrieb des Fahrzeugs erforderlich sind, wie z. B. seine Motoren, Batterie und Rahmen.
Beispiele für Nutzlasten:
- Kameras: hochauflösende Kameras, Wärmebildkameras…
- Sensoren: LiDAR, hyperspektrale Sensoren, chemische Sensoren…
- Kommunikationsausrüstung: Funkgeräte, Signalverstärker...
- Wissenschaftliche Instrumente: Wettersensoren, Luftprobennehmer…
- Andere Spezialausrüstung
