Analisi del volo UAV con sensore inerziale miniaturizzato
Scopri l'analisi del volo UAV per una misurazione precisa del vento.
“Ellipse-N è stato selezionato perché soddisfa tutti i requisiti e offre un equilibrio unico tra precisione, dimensioni e peso.” | Dr.-Ing. Uwe Putze, Eberhard Karls Universität

UAV multiuso per il trasporto di sensori aerotrasportati
MASC è un piccolo UAV sviluppato per la ricerca sullo strato limite atmosferico. Inoltre, il gruppo di Fisica Ambientale dell'Università Eberhard Karls di Tubinga, Germania, lo ha progettato e lo gestisce. Il team ha scelto l'Ellipse-N per registrare la posizione dell'UAV, la velocità al suolo e gli angoli di assetto. Inoltre, la velocità e la direzione del vento possono essere calcolate con precisione considerando il flusso d'aria.
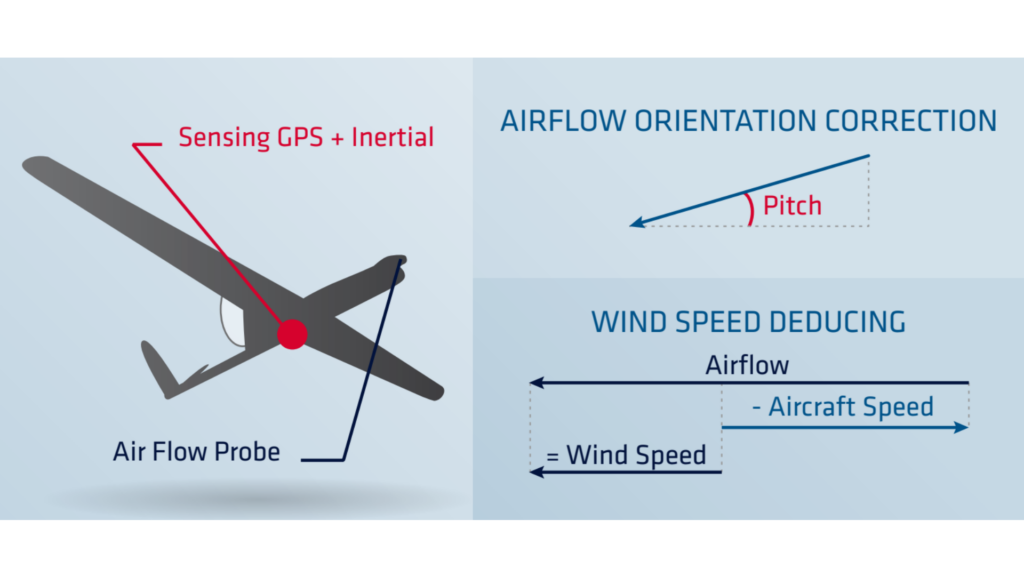
Tuttavia, il calcolo del vento in volo è impegnativo perché la sonda del flusso d'aria richiede una compensazione per il comportamento dell'UAV.
Pertanto, una misurazione inerziale precisa diventa essenziale per un'analisi accurata del volo.
Il carico utile tipico per questo UAV è un sistema di misurazione meteorologica, progettato per calcolare i flussi turbolenti.
Rispetto ai sistemi terrestri o agli aeromobili, l'UAV MASC è uno strumento economico e prezioso per ricerche come la valutazione del sito di impianti eolici in terreni complessi.
“Calcolo della velocità del vento “In-Flight””
Il calcolo del vento in volo presenta sfide perché la sonda del flusso d'aria integrata richiede una compensazione per il comportamento dell'UAV. Inoltre, sottraendo la velocità al suolo e l'assetto dell'UAV dal vettore del flusso d'aria si calcolano la velocità e la direzione del vento. Pertanto, un'unità di misura inerziale precisa diventa essenziale per un'analisi accurata del volo dell'UAV.
Il nostro Ellipse-N: l'INS miniaturizzato assistito da GPS
Turbulence plays an important role in the transport and exchange of energy in the lower atmosphere.
A high data rate is required to record these very fast fluctuations in the wind speed. “We were looking for a precise inertial measurement unit. Required specifications were an accuracy in attitude angles of <1°, and a high data output rate” declares Uwe Putze, Dr.-Ing. at the Eberhard Karls Universität Tübingen.
As the unit had to be mounted in a small unmanned aerial vehicle, small size and low weight were also important for the project. “The Ellipse-N was selected because it fulfills all the requirements and provides a unique balance of accuracy, size and weight”, adds the Project Engineer.
Di piccole dimensioni e peso contenuto, Ellipse-N offre più della semplice misurazione dell'assetto e della direzione. Integra dati inerziali con informazioni GPS e del sensore di pressione per fornire una posizione affidabile e una maggiore accuratezza dell'altitudine.
Il report che mostra la calibrazione dinamica del sensore nell'intero intervallo di temperatura ha reso il team ancora più fiducioso che il sistema avrebbe soddisfatto le specifiche annunciate.
Dati di alta qualità di Ellipse-N
L'Ellipse-N si è integrato senza problemi nel computer di misurazione di bordo tramite un'interfaccia seriale. Inoltre, questa connessione senza interruzioni ha permesso una trasmissione efficiente dei dati.
Mentre la sonda del flusso d'aria misurava la velocità e gli angoli di incidenza, l'Ellipse-N registrava la posizione dell'UAV, la velocità al suolo e gli angoli di assetto. Inoltre, il computer memorizzava i dati grezzi per un uso successivo. Inoltre, un collegamento di telemetria permetteva la visualizzazione in tempo reale sulla stazione di terra.
Utilizzando questo sensore, il sistema ha misurato la velocità del vento con una precisione di ±0,5 m/s su tutti e tre gli assi. Inoltre, ha registrato la variazione di velocità fino a 20Hz, mentre la frequenza di uscita di 200Hz ha eliminato la necessità di interpolazione.


Scopri il nostro Ellipse-N
Ellipse-N è un sistema di navigazione inerziale RTK (INS) compatto e ad alte prestazioni con un ricevitore GNSS integrato Dual band, Quad Constellations. Fornisce rollio, beccheggio, direzione e heave, nonché una posizione GNSS centimetrica.
Il sensore Ellipse-N funziona al meglio in ambienti dinamici e in condizioni GNSS difficili. Inoltre, funziona anche in applicazioni a bassa dinamica con direzione magnetica.

Richiedi un preventivo per Ellipse-N
Ha delle domande?
Benvenuti nella nostra sezione FAQ! Qui troverete le risposte alle domande più comuni sulle applicazioni che presentiamo. Se non trovate quello che state cercando, non esitate a contattarci direttamente!
Come controllare i ritardi di output nelle operazioni UAV?
Il controllo dei ritardi di output nelle operazioni UAV è essenziale per garantire prestazioni reattive, navigazione precisa e comunicazione efficace, soprattutto in applicazioni di difesa o mission-critical.
La latenza di output è un aspetto importante nelle applicazioni di controllo in tempo reale, dove una latenza di output più elevata potrebbe degradare le prestazioni dei loop di controllo. Il nostro software embedded INS è stato progettato per minimizzare la latenza di output: una volta campionati i dati del sensore, l'Extended Kalman Filter (EKF) esegue calcoli rapidi e a tempo costante prima che vengano generati gli output. Tipicamente il ritardo di output osservato è inferiore a un millisecondo.
Se si desidera ottenere il ritardo totale, è necessario aggiungere la latenza di elaborazione alla latenza di trasmissione dei dati. Questa latenza di trasmissione varia da un'interfaccia all'altra. Ad esempio, un messaggio di 50 byte inviato su un'interfaccia UART a 115200 bps impiegherà 4 ms per la trasmissione completa. Si consiglia di considerare velocità di trasmissione più elevate per ridurre al minimo la latenza di uscita.
Gli UAV utilizzano il GPS?
I veicoli aerei senza pilota (UAV), comunemente noti come droni, utilizzano in genere la tecnologia del Global Positioning System (GPS) per la navigazione e il posizionamento.
Il GPS è una componente essenziale del sistema di navigazione di un UAV, in quanto fornisce dati di localizzazione in tempo reale che consentono al drone di determinare con precisione la propria posizione e di eseguire varie attività.
Negli ultimi anni, questo termine è stato sostituito da un nuovo termine GNSS (Global Navigation Satellite System). Il GNSS si riferisce alla categoria generale dei sistemi di navigazione satellitare, che comprende il GPS e vari altri sistemi. Al contrario, il GPS è un tipo specifico di GNSS sviluppato dagli Stati Uniti.
Cos'è il geofencing UAV?
Il geofencing UAV è una barriera virtuale che definisce specifici confini geografici entro i quali può operare un veicolo aereo senza equipaggio (UAV).
Questa tecnologia svolge un ruolo fondamentale nel migliorare la sicurezza, la protezione e la conformità delle operazioni con i droni, in particolare nelle aree in cui le attività di volo possono rappresentare un rischio per persone, proprietà o spazio aereo riservato.
In settori come i servizi di consegna, l'edilizia e l'agricoltura, il geofencing aiuta a garantire che i droni operino all'interno di aree sicure e legali, evitando potenziali conflitti e migliorando l'efficienza operativa.
Le forze dell'ordine e i servizi di emergenza possono utilizzare il geofencing per gestire le operazioni UAV durante eventi pubblici o emergenze, assicurandosi che i droni non entrino in aree sensibili.
Il geofencing può essere impiegato per proteggere la fauna selvatica e le risorse naturali, limitando l'accesso dei droni a determinati habitat o aree di conservazione.
Cos'è un payload?
Un payload si riferisce a qualsiasi apparecchiatura, dispositivo o materiale che un veicolo (drone, imbarcazione...) trasporta per svolgere il suo scopo previsto oltre le funzioni di base. Il payload è separato dai componenti necessari per il funzionamento del veicolo, come i motori, la batteria e il telaio.
Esempi di payload:
- Telecamere: telecamere ad alta risoluzione, telecamere termiche…
- Sensori: LiDAR, sensori iperspettrali, sensori chimici…
- Apparecchiature di comunicazione: radio, ripetitori di segnale...
- Strumenti scientifici: sensori meteorologici, campionatori d'aria…
- Altre attrezzature specializzate
