使用微型惯性传感器的 UAV 飞行分析
了解用于精确风力测量的 UAV 飞行分析。
“之所以选择 Ellipse-N,是因为它满足了所有要求,并在精度、尺寸和重量之间实现了独特的平衡。” | Uwe Putze 博士,Eberhard Karls Universität

多用途机载传感器载具 UAV
MASC 是一种小型 UAV,专为大气边界层研究而开发。此外,德国蒂宾根 Eberhard Karls Universität 的环境物理小组设计并运营它。该团队选择 Ellipse-N 来记录 UAV 的位置、地面速度和姿态角。此外,通过考虑气流,可以准确地计算出风速和风向。
然而,飞行中的风力计算具有挑战性,因为气流探头需要补偿 UAV 的行为。
因此,精确的惯性测量对于准确的飞行分析至关重要。
该 UAV 的典型有效载荷是气象测量系统,旨在计算湍流通量。
与地面系统或飞机相比,MASC UAV 是一种经济高效且有价值的工具,适用于在复杂地形中进行风能电厂选址评估等研究。
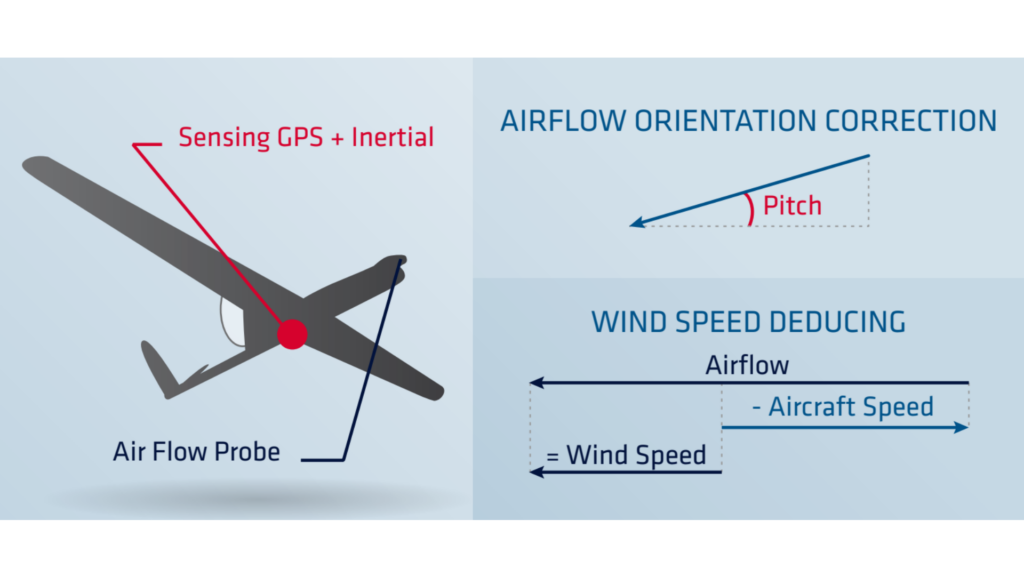
“飞行中”风速计算
飞行中的风力计算提出了挑战,因为嵌入式气流探头需要补偿 UAV 的行为。此外,从气流矢量中减去 UAV 的地面速度和姿态即可计算出风速和风向。因此,精确的惯性测量单元对于准确的 UAV 飞行分析至关重要。
我们的 Ellipse-N:GPS 辅助的微型 INS
Turbulence plays an important role in the transport and exchange of energy in the lower atmosphere.
A high data rate is required to record these very fast fluctuations in the wind speed. “We were looking for a precise inertial measurement unit. Required specifications were an accuracy in attitude angles of <1°, and a high data output rate” declares Uwe Putze, Dr.-Ing. at the Eberhard Karls Universität Tübingen.
As the unit had to be mounted in a small unmanned aerial vehicle, small size and low weight were also important for the project. “The Ellipse-N was selected because it fulfills all the requirements and provides a unique balance of accuracy, size and weight”, adds the Project Engineer.
Ellipse-N 尺寸小、重量轻,不仅可以测量姿态和航向。它将惯性数据与 GPS 和压力传感器信息融合在一起,以提供强大的位置和更高的海拔精度。
该报告显示了传感器在整个温度范围内的动态校准,这使团队更加确信该系统将满足已公布的规格。
Ellipse-N 高质量数据
Ellipse-N 通过串行接口顺利集成到机载测量计算机中。此外,这种无缝连接实现了高效的数据传输。
当气流探头测量空速和入射角时,Ellipse-N 记录 UAV 的位置、地面速度和姿态角。此外,计算机存储原始数据以供以后使用。此外,遥测链路允许在地面站上进行实时显示。
通过使用该传感器,该系统在所有三个轴上以 ±0.5 m/s 的精度测量风速。此外,它以高达 20Hz 的频率记录速度变化,而 200Hz 的输出速率无需插值。


了解我们的 Ellipse-N
Ellipse-N 是一款紧凑型高性能 RTK 惯性导航系统 (INS),集成了双频、四星座 GNSS 接收器。它提供横滚、纵倾、航向和升沉数据,以及厘米级的 GNSS 位置。
Ellipse-N 传感器在动态环境和恶劣的 GNSS 条件下工作效果最佳。此外,它还可以在具有磁航向的较低动态应用中运行。

询问 Ellipse-N 的报价
您有疑问吗?
欢迎访问我们的常见问题解答 (FAQ) 专区!在这里,您可以找到关于我们展示的应用的最常见问题的答案。如果您找不到您要查找的内容,请随时直接与我们联系!
如何在无人机 (UAV) 作业中控制输出延迟?
在无人机 (UAV) 操作中控制输出延迟对于确保快速响应的性能、精确的导航和有效的通信至关重要,尤其是在国防或任务关键型应用中。
输出延迟是实时控制应用中的一个重要方面,较高的输出延迟可能会降低控制回路的性能。我们的 INS 嵌入式软件旨在最大限度地减少输出延迟:一旦传感器数据被采样,扩展卡尔曼滤波器 (EKF) 在生成输出之前会执行小型且恒定时间的计算。通常,观察到的输出延迟小于一毫秒。
如果要获得总延迟,则应将处理延迟添加到数据传输延迟中。此传输延迟因接口而异。例如,在 115200 bps 的 UART 接口上发送的 50 字节消息将花费 4 毫秒才能完成传输。考虑更高的波特率以最大限度地减少输出延迟。
无人机使用 GPS 吗?
无人驾驶飞行器 (UAV),通常被称为无人机,通常使用全球定位系统 (GPS) 技术进行导航和定位。
GPS 是无人机导航系统的重要组成部分,提供实时位置数据,使无人机能够精确确定其位置并执行各种任务。
近年来,该术语已被一个新术语 GNSS(全球导航卫星系统)取代。GNSS 指的是卫星导航系统的总称,它包括 GPS 和各种其他系统。相比之下,GPS 是美国开发的一种特定类型的 GNSS。
什么是无人机地理围栏?
UAV 地理围栏是一个虚拟屏障,用于定义无人飞行器 (UAV) 可以在其中运行的特定地理边界。
这项技术在提高无人机运行的安全性、安保性和合规性方面发挥着关键作用,尤其是在飞行活动可能对人员、财产或限制空域构成风险的区域。
在交付服务、建筑和农业等行业中,地理围栏有助于确保无人机在安全合法的区域内运行,避免潜在的冲突并提高运营效率。
执法部门和紧急服务部门可以使用地理围栏来管理公共活动或紧急情况期间的无人机操作,确保无人机不会进入敏感区域。
地理围栏可用于通过限制无人机进入某些栖息地或保护区来保护野生动物和自然资源。
什么是有效载荷(payload)?
有效载荷是指车辆(无人机、船只 等)为实现其基本功能之外的预期目的而携带的任何设备、装置或材料。有效载荷与车辆运行所需的组件(如电机、电池和框架)是分开的。
有效载荷示例:
- 相机:高分辨率相机、热成像相机……
- 传感器:LiDAR、高光谱传感器、化学传感器等
- 通信设备:无线电、信号中继器……
- 科学仪器:气象传感器、空气采样器等
- 其他专用设备
