Analyse de vol d'UAV avec un capteur inertiel miniature
Découvrez l'analyse de vol des drones pour une mesure précise du vent.
"L'Ellipse-N a été sélectionné parce qu'il répond à toutes les exigences et offre un équilibre unique entre précision, taille et poids." | Dr.-Ing. Uwe Putze, Eberhard Karls Universität

UAV porteur de capteurs aéroportés polyvalent
Le MASC est un petit drone développé pour la recherche sur la couche limite atmosphérique. De plus, le groupe de physique environnementale de l'université Eberhard Karls de Tübingen, en Allemagne, l'a conçu et l'exploite. L'équipe a choisi l'Ellipse-N pour enregistrer la position, la vitesse au sol et les angles d'attitude du drone. De plus, la vitesse et la direction du vent peuvent être calculées avec précision en tenant compte du flux d'air.
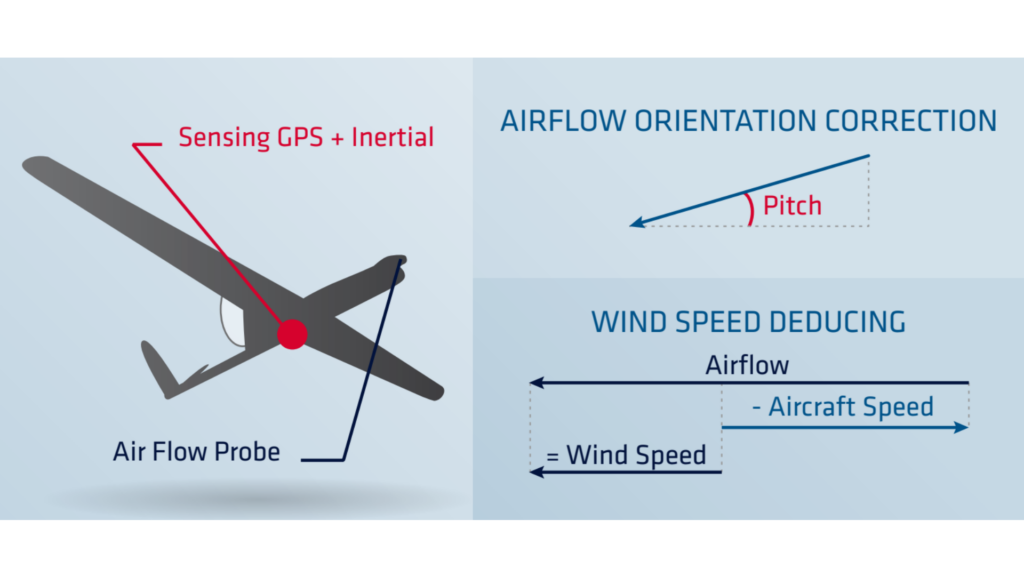
Cependant, le calcul du vent en vol est difficile car la sonde de flux d'air nécessite une compensation pour le comportement du drone.
Ainsi, une mesure inertielle précise devient essentielle pour une analyse de vol précise.
La charge utile typique de ce drone est un système de mesure météorologique, conçu pour calculer les flux turbulents.
Par rapport aux systèmes terrestres ou aux aéronefs, le drone MASC est un outil rentable et précieux pour les recherches telles que l'évaluation du site d'une centrale éolienne en terrain complexe.
Calcul de la vitesse du vent « en vol »
Le calcul du vent en vol présente des défis car la sonde de flux d'air intégrée nécessite une compensation pour le comportement du drone. De plus, la soustraction de la vitesse au sol et de l'attitude du drone du vecteur de flux d'air permet de calculer la vitesse et la direction du vent. Ainsi, une centrale inertielle précise devient essentielle pour une analyse précise du vol du drone.
Notre Ellipse-N : l'INS miniature assisté par GPS
Turbulence plays an important role in the transport and exchange of energy in the lower atmosphere.
A high data rate is required to record these very fast fluctuations in the wind speed. “We were looking for a precise inertial measurement unit. Required specifications were an accuracy in attitude angles of <1°, and a high data output rate” declares Uwe Putze, Dr.-Ing. at the Eberhard Karls Universität Tübingen.
As the unit had to be mounted in a small unmanned aerial vehicle, small size and low weight were also important for the project. “The Ellipse-N was selected because it fulfills all the requirements and provides a unique balance of accuracy, size and weight”, adds the Project Engineer.
De petite taille et léger, l'Ellipse-N offre plus que la mesure de l'attitude et du cap. Il fusionne les données inertielles avec les informations du GPS et du capteur de pression pour fournir une position robuste et une précision d'altitude améliorée.
Le rapport montrant l'étalonnage dynamique du capteur sur toute la plage de températures a rendu l'équipe encore plus confiante que le système répondrait aux spécifications annoncées.
Données de haute qualité de l'Ellipse-N
L'Ellipse-N s'est intégré en douceur dans l'ordinateur de mesure embarqué via une interface série. De plus, cette connexion transparente a permis une transmission efficace des données.
Alors que la sonde de flux d'air mesurait la vitesse de l'air et les angles d'incidence, l'Ellipse-N enregistrait la position, la vitesse au sol et les angles d'attitude du drone. De plus, l'ordinateur stockait les données brutes pour une utilisation ultérieure. De plus, une liaison de télémétrie permettait un affichage en temps réel sur la station au sol.
En utilisant ce capteur, le système a mesuré la vitesse du vent avec une précision de ±0,5 m/s sur les trois axes. De plus, il a enregistré la variation de vitesse jusqu'à 20 Hz, tandis que le taux de sortie de 200 Hz a supprimé le besoin d'interpolation.


Découvrez notre Ellipse-N
Ellipse-N est un système de navigation inertielle (INS) RTK compact et performant, doté d'un récepteur GNSS bi-bande et Quad Constellations intégré. Il fournit le roulis, le tangage, le cap et le pilonnement, ainsi qu'une position GNSS centimétrique.
Le capteur Ellipse-N est particulièrement performant dans les environnements dynamiques et les conditions GNSS difficiles. De plus, il fonctionne également dans les applications moins dynamiques avec un cap magnétique.

Demander un devis pour l'Ellipse-N
Vous avez des questions ?
Bienvenue dans notre section FAQ ! Vous trouverez ici les réponses aux questions les plus fréquemment posées sur les applications que nous présentons. Si vous ne trouvez pas ce que vous cherchez, n'hésitez pas à nous contacter directement !
Comment contrôler les délais de sortie dans les opérations UAV ?
Le contrôle des délais de sortie dans les opérations UAV est essentiel pour garantir des performances réactives, une navigation précise et une communication efficace, en particulier dans les applications de défense ou critiques.
La latence de sortie est un aspect important dans les applications de contrôle en temps réel, où une latence de sortie plus élevée pourrait dégrader les performances des boucles de contrôle. Notre logiciel embarqué INS a été conçu pour minimiser la latence de sortie : une fois que les données des capteurs sont échantillonnées, le Filtre de Kalman étendu (EKF) effectue des calculs faibles et à temps constant avant que les sorties ne soient générées. Généralement, le délai de sortie observé est inférieur à une milliseconde.
Le temps de latence du traitement doit être ajouté au temps de latence de la transmission des données si vous souhaitez obtenir le délai total. Ce temps de latence de transmission varie d'une interface à l'autre. Par exemple, un message de 50 octets envoyé sur une interface UART à 115200 bps prendra 4 ms pour une transmission complète. Envisagez des débits en bauds plus élevés pour minimiser la latence de sortie.
Les UAV utilisent-ils le GPS ?
Les véhicules aériens sans pilote (UAV), communément appelés drones, utilisent généralement la technologie du système de positionnement mondial (GPS) pour la navigation et le positionnement.
Le GPS est un élément essentiel du système de navigation d'un drone; il fournit des données de localisation en temps réel qui permettent au drone de déterminer sa position avec précision et d'exécuter diverses tâches.
Ces dernières années, ce terme a été remplacé par un nouveau terme, le GNSS (Global Navigation Satellite System). Le GNSS désigne la catégorie générale des systèmes de navigation par satellite, qui englobe le GPS et divers autres systèmes. En revanche, le GPS est un type spécifique de GNSS développé par les États-Unis.
Qu'est-ce que le géorepérage d'UAV ?
Le géorepérage d'UAV est une barrière virtuelle qui définit des limites géographiques spécifiques dans lesquelles un véhicule aérien sans pilote (UAV) peut fonctionner.
Cette technologie joue un rôle essentiel dans l'amélioration de la sécurité, de la sûreté et de la conformité des opérations de drones, en particulier dans les zones où les activités de vol peuvent présenter des risques pour les personnes, les biens ou l'espace aérien réglementé.
Dans des secteurs tels que les services de livraison, la construction et l'agriculture, le geofencing permet de garantir que les drones fonctionnent dans des zones sûres et légales, évitant ainsi les conflits potentiels et améliorant l'efficacité opérationnelle.
Les forces de l'ordre et les services d'urgence peuvent utiliser le géorepérage pour gérer les opérations d'UAV lors d'événements publics ou d'urgences, en veillant à ce que les drones ne pénètrent pas dans les zones sensibles.
Le geofencing peut être utilisé pour protéger la faune et les ressources naturelles en limitant l'accès des drones à certains habitats ou zones de conservation.
Qu'est-ce qu'une charge utile ?
Une charge utile fait référence à tout équipement, dispositif ou matériel qu'un véhicule (drone, navire …) transporte pour remplir sa fonction prévue au-delà des fonctions de base. La charge utile est distincte des composants nécessaires au fonctionnement du véhicule, tels que ses moteurs, sa batterie et son châssis.
Exemples de charges utiles :
- Caméras : caméras haute résolution, caméras d'imagerie thermique, etc.
- Capteurs : LiDAR, capteurs hyperspectraux, capteurs chimiques, etc.
- Équipement de communication : radios, répéteurs de signaux, etc.
- Instruments scientifiques : capteurs météorologiques, échantillonneurs d’air, etc.
- Autre équipement spécialisé
