소형 관성 센서를 이용한 UAV 비행 분석
정밀 풍속 측정을 위한 UAV 비행 분석을 살펴보십시오.
“Ellipse-N은 모든 요구 사항을 충족하고 정확성, 크기 및 무게의 독특한 균형을 제공하기 때문에 선택되었습니다.” | Dr.-Ing. Uwe Putze, Eberhard Karls Universität

다목적 항공 센서 운반 UAV
MASC는 대기 경계층 연구를 위해 개발된 소형 UAV입니다. 또한, 독일 튀빙겐 에버하르트 칼스 대학교의 환경 물리학 그룹에서 이를 설계하고 운영합니다. 연구팀은 UAV의 위치, 지상 속도 및 자세 각도를 기록하기 위해 Ellipse-N을 선택했습니다. 또한, 공기 흐름을 고려하여 풍속과 풍향을 정확하게 계산할 수 있습니다.
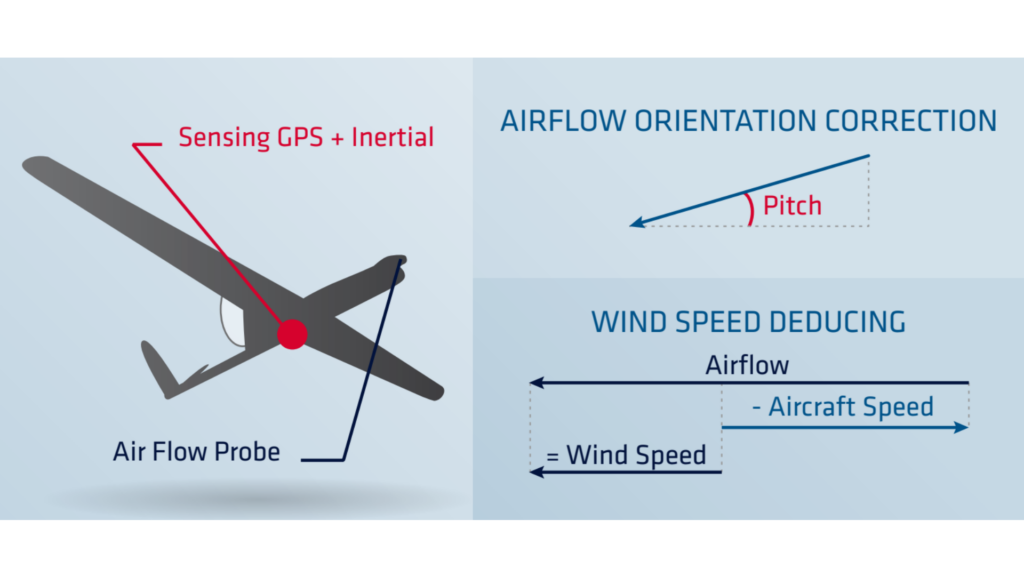
그러나 기류 프로브가 UAV의 움직임을 보정해야 하므로 비행 중 풍속 계산은 어렵습니다.
따라서 정확한 비행 분석을 위해서는 정밀한 관성 측정이 필수적입니다.
이 UAV의 일반적인 페이로드는 난류 플럭스를 계산하도록 설계된 기상 측정 시스템입니다.
지상 시스템이나 항공기와 비교할 때, MASC UAV는 복잡한 지형에서의 풍력 발전소 부지 평가와 같은 연구에 비용 효율적이고 가치 있는 도구입니다.
“비행 중” 풍속 계산
내장된 기류 프로브가 UAV의 움직임을 보정해야 하므로 비행 중 풍속 계산은 어려움이 있습니다. 또한, 기류 벡터에서 UAV의 지상 속도와 자세를 빼서 풍속과 풍향을 계산합니다. 따라서 정확한 UAV 비행 분석을 위해서는 정밀한 관성 측정 장치(IMU)가 필수적입니다.
당사의 Ellipse-N: GPS 지원 소형 INS
Turbulence plays an important role in the transport and exchange of energy in the lower atmosphere.
A high data rate is required to record these very fast fluctuations in the wind speed. “We were looking for a precise inertial measurement unit. Required specifications were an accuracy in attitude angles of <1°, and a high data output rate” declares Uwe Putze, Dr.-Ing. at the Eberhard Karls Universität Tübingen.
As the unit had to be mounted in a small unmanned aerial vehicle, small size and low weight were also important for the project. “The Ellipse-N was selected because it fulfills all the requirements and provides a unique balance of accuracy, size and weight”, adds the Project Engineer.
소형 및 경량의 Ellipse-N은 자세 및 헤딩 측정 이상의 기능을 제공합니다. 관성 데이터를 GPS 및 압력 센서 정보와 융합하여 강력한 위치와 향상된 고도 정확도를 제공합니다.
전체 온도 범위에서 센서 동적 보정을 보여주는 보고서는 시스템이 발표된 사양을 충족할 것이라는 확신을 팀에게 심어주었습니다.
Ellipse-N의 고품질 데이터
Ellipse-N은 직렬 인터페이스를 통해 온보드 측정 컴퓨터에 원활하게 통합되었습니다. 또한, 이러한 원활한 연결은 효율적인 데이터 전송을 가능하게 했습니다.
기류 프로브가 대기 속도와 입사각을 측정하는 동안, Ellipse-N은 UAV의 위치, 지상 속도 및 자세 각도를 기록했습니다. 또한, 컴퓨터는 나중에 사용할 원시 데이터를 저장했습니다. 또한, 텔레메트리 링크를 통해 지상 스테이션에서 실시간으로 데이터를 표시할 수 있었습니다.
이 센서를 사용하여 시스템은 3개 축 모두에서 ±0.5 m/s의 정확도로 풍속을 측정했습니다. 또한, 최대 20Hz로 속도 변화를 기록했으며, 200Hz의 출력 속도는 보간의 필요성을 없앴습니다.


당사의 Ellipse-N을 살펴보십시오.
Ellipse-N은 통합 듀얼 밴드, 쿼드 성좌 GNSS 수신기를 갖춘 소형 고성능 RTK INS입니다. 롤, 피치, 헤딩 및 상하 동요(heave)뿐만 아니라 센티미터급 GNSS 위치를 제공합니다.
Ellipse-N 센서는 동적 환경 및 열악한 GNSS 조건에서 가장 잘 작동합니다. 또한, 자기 헤딩을 사용하여 낮은 동적 애플리케이션에서도 기능합니다.

Ellipse-N 견적 요청
궁금한 점이 있으십니까?
FAQ 섹션에 오신 것을 환영합니다! 여기에서는 SBG Systems에서 소개하는 애플리케이션에 대한 가장 일반적인 질문에 대한 답변을 찾을 수 있습니다. 찾고 있는 내용이 없으면 언제든지 직접 문의하십시오!
UAV 작동 시 출력 지연을 제어하는 방법은 무엇입니까?
UAV 작동 시 출력 지연을 제어하는 것은 특히 국방 또는 중요 임무 애플리케이션에서 반응성능, 정밀한 내비게이션 및 효과적인 통신을 보장하는 데 필수적입니다.
출력 지연 시간은 실시간 제어 애플리케이션에서 중요한 측면이며, 더 높은 출력 지연 시간은 제어 루프 성능을 저하시킬 수 있습니다. 당사의 INS 임베디드 소프트웨어는 출력 지연 시간을 최소화하도록 설계되었습니다. 센서 데이터가 샘플링되면 확장 칼만 필터(EKF)는 출력이 생성되기 전에 작고 일정한 시간 계산을 수행합니다. 일반적으로 관찰되는 출력 지연은 1밀리초 미만입니다.
전체 지연 시간을 확인하려면 데이터 전송 지연 시간에 처리 지연 시간을 추가해야 합니다. 이 전송 지연 시간은 인터페이스마다 다릅니다. 예를 들어 115200bps에서 UART 인터페이스로 전송된 50바이트 메시지는 전체 전송에 4ms가 걸립니다. 출력 지연 시간을 최소화하려면 더 높은 보드 전송률을 고려하십시오.
UAV는 GPS를 사용합니까?
일반적으로 드론으로 알려진 무인 항공기(UAV)는 일반적으로 내비게이션 및 위치 결정을 위해 GPS(Global Positioning System) 기술을 사용합니다.
GPS는 무인항공기(UAV)의 항법 시스템에서 필수적인 구성 요소로, 드론이 자신의 위치를 정확하게 파악하고 다양한 임무를 수행할 수 있도록 실시간 위치 데이터를 제공합니다.
최근 몇 년 동안, 이 용어는 새로운 용어인 GNSS(Global Navigation Satellite System)로 대체되었습니다. GNSS는 GPS 및 다양한 다른 시스템을 포함하는 위성 항법 시스템의 포괄적인 범주를 의미합니다. 이와 대조적으로, GPS는 미국에서 개발된 특정 유형의 GNSS입니다.
UAV 지오펜싱이란 무엇입니까?
UAV 지오펜싱은 무인 항공기(UAV)가 작동할 수 있는 특정 지리적 경계를 정의하는 가상 장벽입니다.
이 기술은 특히 비행 활동이 사람, 재산 또는 제한된 공역에 위험을 초래할 수 있는 지역에서 드론 운영의 안전, 보안 및 규정 준수를 강화하는 데 중요한 역할을 합니다.
배달 서비스, 건설 및 농업과 같은 산업에서 지오펜싱은 드론이 안전하고 합법적인 지역 내에서 작동하도록 보장하여 잠재적인 충돌을 피하고 운영 효율성을 향상시키는 데 도움이 됩니다.
법 집행 기관 및 응급 서비스는 지오펜싱을 사용하여 공공 행사 또는 비상 상황 시 UAV 작동을 관리하여 드론이 민감한 지역에 들어가지 않도록 할 수 있습니다.
지오펜싱은 특정 서식지 또는 보존 구역에 대한 드론 접근을 제한하여 야생 동물과 천연 자원을 보호하는 데 사용될 수 있습니다.
페이로드란 무엇입니까?
페이로드는 차량(드론, 선박 등)이 기본적인 기능 외에 의도된 목적을 수행하기 위해 탑재하는 모든 장비, 장치 또는 재료를 의미합니다. 페이로드는 모터, 배터리 및 프레임과 같이 차량 작동에 필요한 구성 요소와는 별개입니다.
탑재 하중 예:
- 카메라: 고해상도 카메라, 열화상 카메라 등
- 센서: LiDAR, 초분광 센서, 화학 센서 등
- 통신 장비: 라디오, 신호 중계기 등
- 과학 기기: 기상 센서, 공기 샘플러 등
- 기타 특수 장비
