Analiza lotu UAV za pomocą miniaturowego czujnika inercyjnego
Odkryj analizę lotu UAV do precyzyjnego pomiaru wiatru.
“Ellipse-N został wybrany, ponieważ spełnia wszystkie wymagania i zapewnia unikalną równowagę dokładności, rozmiaru i wagi.” | Dr.-Ing. Uwe Putze, Eberhard Karls Universität

Wielozadaniowy powietrzny nośnik czujników UAV
MASC to mały bezzałogowy statek powietrzny (UAV) opracowany do badań warstwy granicznej atmosfery. Ponadto, grupa Environmental Physics z Eberhard Karls Universität Tübingen w Niemczech, Zaprojektowała go i nim operuje. Zespół wybrał Ellipse-N do rejestrowania pozycji UAV, prędkości względem ziemi i kątów orientacji. Dodatkowo, prędkość i kierunek wiatru można dokładnie obliczyć, uwzględniając przepływ powietrza.
Jednak obliczanie wiatru podczas lotu jest trudne, ponieważ sonda przepływu powietrza wymaga kompensacji zachowania UAV.
Zatem, precyzyjny pomiar inercyjny staje się niezbędny do dokładnej analizy lotu.
Typowym ładunkiem użytecznym dla tego UAV jest meteorologiczny system pomiarowy, zaprojektowana do obliczania turbulentnych strumieni.
W porównaniu z systemami naziemnymi lub statkami powietrznymi, MASC UAV jest opłacalnym i cennym narzędziem dla badań, takich jak ocena lokalizacji elektrowni wiatrowych w złożonym terenie.
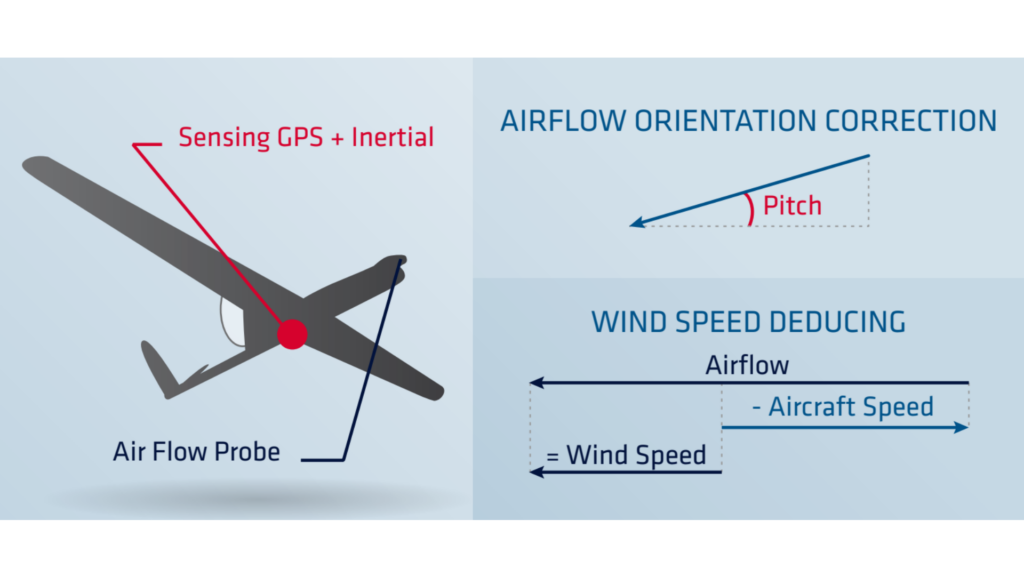
Obliczanie prędkości wiatru „w locie”
Obliczenia wiatru w locie stanowią wyzwanie, ponieważ wbudowana sonda przepływu powietrza wymaga kompensacji zachowania UAV. Ponadto, odjęcie prędkości względem ziemi i orientacji UAV od wektora przepływu powietrza oblicza prędkość i kierunek wiatru. Zatem precyzyjna jednostka pomiaru inercyjnego staje się niezbędna do dokładnej analizy lotu UAV.
Nasz Ellipse-N: miniaturowy INS wspomagany przez GPS
Turbulence plays an important role in the transport and exchange of energy in the lower atmosphere.
A high data rate is required to record these very fast fluctuations in the wind speed. “We were looking for a precise inertial measurement unit. Required specifications were an accuracy in attitude angles of <1°, and a high data output rate” declares Uwe Putze, Dr.-Ing. at the Eberhard Karls Universität Tübingen.
As the unit had to be mounted in a small unmanned aerial vehicle, small size and low weight were also important for the project. “The Ellipse-N was selected because it fulfills all the requirements and provides a unique balance of accuracy, size and weight”, adds the Project Engineer.
Małe rozmiary i waga sprawiają, że Ellipse-N oferuje więcej niż tylko pomiar orientacji i heading. Łączy dane inercyjne z informacjami z GPS i czujnika ciśnienia, zapewniając stabilną pozycję i zwiększoną dokładność wysokości.
Raport przedstawiający dynamiczną kalibrację czujnika w pełnym zakresie temperatur jeszcze bardziej utwierdził zespół w przekonaniu, że system spełni deklarowane specyfikacje.
Wysokiej jakości dane z Ellipse-N
Ellipse-N zintegrował się płynnie z pokładowym komputerem pomiarowym poprzez interfejs szeregowy. Ponadto to bezproblemowe połączenie umożliwiło wydajną transmisję danych.
Podczas gdy sonda przepływu powietrza mierzyła prędkość powietrza i kąty natarcia, Ellipse-N rejestrował pozycję UAV, prędkość względem ziemi i kąty orientacji. Dodatkowo komputer przechowywał surowe dane do późniejszego wykorzystania. Co więcej, łącze telemetryczne umożliwiało wyświetlanie w czasie rzeczywistym na stacji naziemnej.
Dzięki zastosowaniu tego czujnika system mierzył prędkość wiatru z dokładnością ±0,5 m/s we wszystkich trzech osiach. Ponadto rejestrował zmiany prędkości z częstotliwością do 20 Hz, a częstotliwość wyjściowa 200 Hz eliminuje potrzebę interpolacji.


Odkryj nasz Ellipse-N
Ellipse-N to kompaktowy i wydajny system nawigacji inercyjnej RTK (INS) z wbudowanym dwupasmowym odbiornikiem GNSS obsługującym cztery konstelacje. Dostarcza dane o przechyłach (roll, pitch), kurs (heading) i kołysaniu (heave), a także centymetrową pozycję GNSS.
Czujnik Ellipse-N najlepiej sprawdza się w środowiskach dynamicznych i trudnych warunkach GNSS. Ponadto, funkcjonuje również w aplikacjach o niższej dynamice z heading magnetycznym.

Zapytaj o wycenę dla Ellipse-N
Masz pytania?
Witamy w naszej sekcji FAQ! Znajdziesz tutaj odpowiedzi na najczęściej zadawane pytania dotyczące prezentowanych przez nas aplikacji. Jeśli nie znajdziesz tego, czego szukasz, skontaktuj się z nami bezpośrednio!
Jak kontrolować opóźnienia wyjściowe w operacjach UAV?
Kontrolowanie opóźnień wyjściowych w operacjach UAV jest niezbędne do zapewnienia responsywnej wydajności, precyzyjnej nawigacji i skutecznej komunikacji, szczególnie w obronnych lub krytycznych dla misji zastosowaniach.
Opóźnienie wyjściowe jest ważnym aspektem w aplikacjach sterowania w czasie rzeczywistym, gdzie wyższe opóźnienie wyjściowe może pogorszyć wydajność pętli sterowania. Nasze oprogramowanie wbudowane INS zostało zaprojektowana w celu zminimalizowania opóźnienia wyjściowego: po próbkowaniu danych z czujników, Filtr Kalmana (EKF) wykonuje małe i stałe obliczenia czasowe przed wygenerowaniem wyjść. Zazwyczaj obserwowane opóźnienie wyjściowe jest mniejsze niż jedna milisekunda.
Opóźnienie przetwarzania należy dodać do opóźnienia transmisji danych, jeśli chcesz uzyskać całkowite opóźnienie. To opóźnienie transmisji różni się w zależności od interfejsu. Na przykład, wiadomość o długości 50 bajtów wysłana przez interfejs UART z prędkością 115200 bps zajmie 4 ms na pełną transmisję. Rozważ wyższe prędkości transmisji, aby zminimalizować opóźnienie wyjściowe.
Czy UAV używają GPS?
Bezzałogowe statki powietrzne (UAV), powszechnie znane jako drony, zazwyczaj wykorzystują technologię Global Positioning System (GPS) do nawigacji i pozycjonowania.
GPS jest kluczowym komponentem systemu nawigacyjnego UAV, dostarczającym danych o lokalizacji w czasie rzeczywistym, które umożliwiają dronowi precyzyjne określenie jego pozycji i wykonywanie różnorodnych zadań.
W ostatnich latach termin ten został zastąpiony przez nowy termin GNSS (Globalny System Nawigacji Satelitarnej). GNSS odnosi się do ogólnej kategorii satelitarnych systemów nawigacyjnych, która obejmuje GPS i różne inne systemy. Z kolei GPS jest specyficznym typem GNSS opracowanym przez Stany Zjednoczone.
Co to jest geofencing UAV?
Geofencing UAV to wirtualna bariera, która określa konkretne granice geograficzne, w których może działać bezzałogowy statek powietrzny (UAV).
Technologia ta odgrywa kluczową rolę w poprawie bezpieczeństwa, ochrony i zgodności operacji dronów, szczególnie na obszarach, gdzie działania lotnicze mogą stanowić zagrożenie dla ludzi, mienia lub zastrzeżonej przestrzeni powietrznej.
W branżach takich jak usługi kurierskie, budownictwo i rolnictwo, geofencing pomaga zapewnić, że drony działają na bezpiecznych i legalnych obszarach, unikając potencjalnych konfliktów i zwiększając efektywność operacyjną.
Organy ścigania i służby ratunkowe mogą wykorzystywać geofencing do zarządzania operacjami UAV podczas imprez publicznych lub sytuacji kryzysowych, zapewniając, że drony nie wlatują na obszary wrażliwe.
Geofencing może być wykorzystywany do ochrony dzikiej przyrody i zasobów naturalnych poprzez ograniczenie dostępu dronów do określonych siedlisk lub obszarów chronionych.
Co to jest ładunek?
Ładunek odnosi się do każdego sprzętu, urządzenia lub materiału, który pojazd (dron, statek...) przewozi w celu wykonania zamierzonego zadania wykraczającego poza podstawowe funkcje. Ładunek jest oddzielony od komponentów wymaganych do działania pojazdu, takich jak silniki, akumulator i rama.
Przykłady ładunków:
- Kamery: kamery wysokiej rozdzielczości, kamery termowizyjne…
- Czujniki: LiDAR, czujniki hiperspektralne, czujniki chemiczne…
- Sprzęt komunikacyjny: radia, wzmacniaki sygnału…
- Instrumenty naukowe: czujniki pogodowe, próbniki powietrza…
- Inny specjalistyczny sprzęt
