Análise de voo de VANT com sensor inercial em miniatura
Descubra a análise de voo de UAV para medição precisa do vento.
“O Ellipse-N foi selecionado porque atende a todos os requisitos e oferece um equilíbrio único de precisão, tamanho e peso.” | Dr.-Ing. Uwe Putze, Eberhard Karls Universität

VANT transportador de sensor aerotransportado multifuncional
O MASC é um pequeno UAV desenvolvido para pesquisa da camada limite atmosférica. Além disso, o grupo de Física Ambiental da Eberhard Karls Universität Tübingen, Alemanha, o projetou e opera. A equipe escolheu o Ellipse-N para registrar a posição do UAV, a velocidade do solo e os ângulos de atitude. Além disso, a velocidade e a direção do vento podem ser calculadas com precisão, considerando o fluxo de ar.
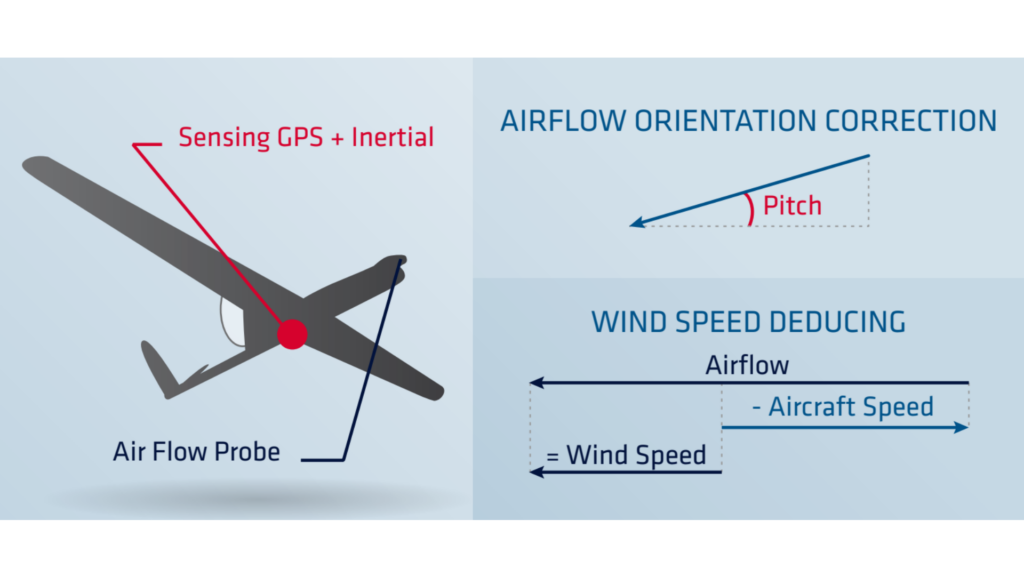
No entanto, a computação do vento em voo é desafiadora porque a sonda de fluxo de ar requer compensação para o comportamento do UAV.
Assim, a medição inercial precisa torna-se essencial para uma análise de voo precisa.
A carga útil típica para este UAV é um sistema de medição meteorológica, projetado para calcular fluxos turbulentos.
Comparado com sistemas terrestres ou aeronaves, o UAV MASC é uma ferramenta valiosa e econômica para pesquisas como a avaliação do local de usinas de energia eólica em terrenos complexos.
Computação da velocidade do vento “In-Flight”
A computação do vento em voo apresenta desafios porque a sonda de fluxo de ar incorporada requer compensação para o comportamento do UAV. Além disso, subtrair a velocidade do solo e a atitude do UAV do vetor de fluxo de ar calcula a velocidade e a direção do vento. Assim, uma unidade de medição inercial precisa torna-se essencial para uma análise precisa do voo do UAV.
Nosso Ellipse-N: o INS miniaturizado auxiliado por GPS
Turbulence plays an important role in the transport and exchange of energy in the lower atmosphere.
A high data rate is required to record these very fast fluctuations in the wind speed. “We were looking for a precise inertial measurement unit. Required specifications were an accuracy in attitude angles of <1°, and a high data output rate” declares Uwe Putze, Dr.-Ing. at the Eberhard Karls Universität Tübingen.
As the unit had to be mounted in a small unmanned aerial vehicle, small size and low weight were also important for the project. “The Ellipse-N was selected because it fulfills all the requirements and provides a unique balance of accuracy, size and weight”, adds the Project Engineer.
Pequeno e leve, o Ellipse-N oferece mais do que apenas medição de atitude e direção. Ele combina dados inerciais com informações do GPS e do sensor de pressão para fornecer uma posição robusta e uma precisão de altitude aprimorada.
O relatório que mostra a calibração dinâmica do sensor em toda a faixa de temperatura tornou a equipe ainda mais confiante de que o sistema atenderia às especificações anunciadas.
Dados de alta qualidade do Ellipse-N
O Ellipse-N integrou-se perfeitamente ao computador de medição de bordo através de uma interface serial. Além disso, esta conexão perfeita permitiu uma transmissão de dados eficiente.
Enquanto a sonda de fluxo de ar media a velocidade do ar e os ângulos de incidência, o Ellipse-N registrava a posição do UAV, a velocidade do solo e os ângulos de atitude. Além disso, o computador armazenava dados brutos para uso posterior. Além disso, um link de telemetria permitia a exibição em tempo real na estação terrestre.
Ao usar este sensor, o sistema mediu a velocidade do vento com precisão de ±0,5 m/s em todos os três eixos. Além disso, registrou a variação de velocidade em até 20 Hz, enquanto a taxa de saída de 200 Hz removeu a necessidade de interpolação.


Descubra nosso Ellipse-N
O Ellipse-N é um Sistema de Navegação Inercial (INS) RTK compacto e de alto desempenho com um receptor GNSS de banda dupla e quatro constelações integrado. Ele fornece roll, pitch, heading e heave, bem como uma posição GNSS centimétrica.
O sensor Ellipse-N funciona melhor em ambientes dinâmicos e condições GNSS adversas. Além disso, ele também funciona em aplicações dinâmicas mais baixas com heading magnético.

Solicite uma cotação para o Ellipse-N
Você tem perguntas?
Bem-vindo à nossa seção de FAQ! Aqui, você encontrará respostas para as perguntas mais comuns sobre as aplicações que apresentamos. Se você não encontrar o que procura, sinta-se à vontade para nos contatar diretamente!
Como controlar os atrasos de saída em operações com UAVs?
Controlar os atrasos de saída nas operações de VANTs é essencial para garantir um desempenho responsivo, navegação precisa e comunicação eficaz, especialmente em aplicações de defesa ou de missão crítica.
A latência de saída é um aspecto importante em aplicações de controle em tempo real, onde uma latência de saída mais alta pode degradar o desempenho dos loops de controle. Nosso software embarcado INS foi projetado para minimizar a latência de saída: uma vez que os dados do sensor são amostrados, o Extended Kalman Filter (EKF) executa cálculos pequenos e de tempo constante antes que as saídas sejam geradas. Normalmente, o atraso de saída observado é inferior a um milissegundo.
A latência de processamento deve ser adicionada à latência de transmissão de dados se você quiser obter o atraso total. Essa latência de transmissão varia de uma interface para outra. Por exemplo, uma mensagem de 50 bytes enviada em uma interface UART a 115200 bps levará 4ms para a transmissão completa. Considere taxas de transmissão mais altas para minimizar a latência de saída.
Os UAVs usam GPS?
Veículos aéreos não tripulados (UAVs), comumente conhecidos como drones, normalmente usam a tecnologia do Sistema de Posicionamento Global (GPS) para navegação e posicionamento.
O GPS é um componente essencial do sistema de navegação de um UAV, fornecendo dados de localização em tempo real que permitem que o drone determine sua posição com precisão e execute diversas tarefas.
Nos últimos anos, este termo foi substituído por um novo, GNSS (Global Navigation Satellite System). GNSS refere-se à categoria geral de sistemas de navegação por satélite, que engloba GPS e vários outros sistemas. Em contraste, o GPS é um tipo específico de GNSS desenvolvido pelos Estados Unidos.
O que é geofencing de UAV?
O geofencing de VANT é uma barreira virtual que define limites geográficos específicos dentro dos quais um veículo aéreo não tripulado (VANT) pode operar.
Esta tecnologia desempenha um papel crítico no aprimoramento da segurança e da conformidade das operações com drones, principalmente em áreas onde as atividades de voo podem representar riscos para pessoas, propriedades ou espaço aéreo restrito.
Em setores como serviços de entrega, construção e agricultura, o geofencing ajuda a garantir que os drones operem dentro de áreas seguras e legais, evitando potenciais conflitos e aumentando a eficiência operacional.
As autoridades policiais e os serviços de emergência podem usar o geofencing para gerenciar as operações de UAV durante eventos públicos ou emergências, garantindo que os drones não entrem em áreas sensíveis.
O geofencing pode ser empregado para proteger a vida selvagem e os recursos naturais, restringindo o acesso de drones a certos habitats ou áreas de conservação.
O que é uma carga útil?
Uma carga útil refere-se a qualquer equipamento, dispositivo ou material que um veículo (drone, embarcação...) transporta para desempenhar sua finalidade pretendida além das funções básicas. A carga útil é separada dos componentes necessários para a operação do veículo, como seus motores, bateria e estrutura.
Exemplos de Cargas Úteis:
- Câmeras: câmeras de alta resolução, câmeras termográficas...
- Sensores: LiDAR, sensores hiperespectrais, sensores químicos…
- Equipamentos de comunicação: rádios, repetidores de sinal…
- Instrumentos científicos: sensores meteorológicos, coletores de ar…
- Outros equipamentos especializados
