了解我们搭载最新一代导航算法的传感器。


RTS:Rauch–Tung–Striebel
RTS(Rauch-Tung-Striebel)平滑器是一种数学算法,用于提高动态系统中状态估计的准确性。它属于平滑算法系列,并扩展了卡尔曼滤波器的功能,卡尔曼滤波器实时估计系统的状态。虽然卡尔曼滤波器按顺序处理数据并仅根据过去和现在的测量值来估计当前状态,但 RTS 平滑器通过使用过去和未来的测量值来追溯地细化状态估计,从而更进一步。此过程会产生明显更准确的状态估计,尤其是在涉及数据后处理的应用程序中。
RTS 如何工作?
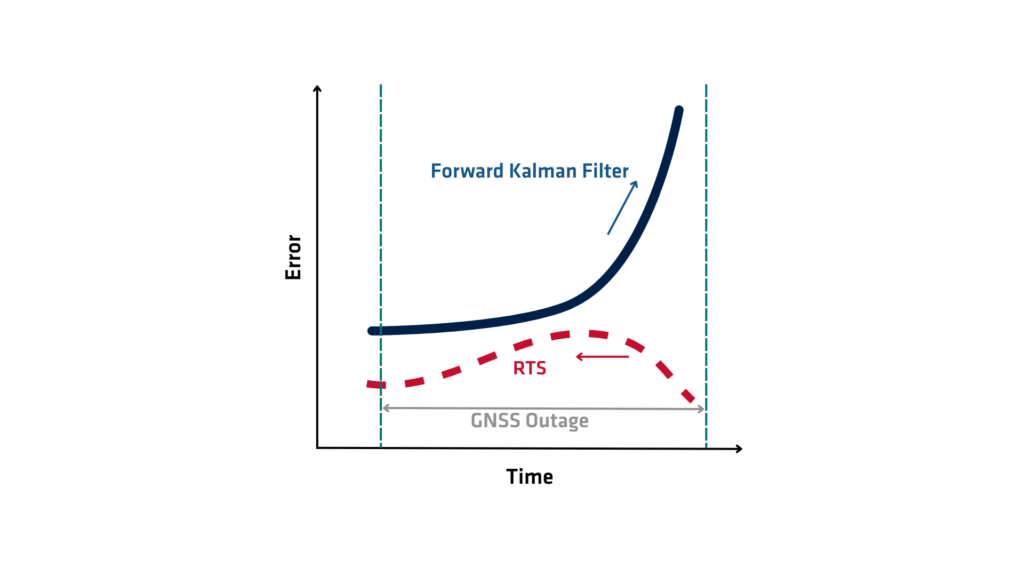
RTS(Rauch-Tung-Striebel)平滑器或RTS平滑器主要分两个阶段运行:前向传递和后向传递。在前向传递阶段,算法通过数据运行标准卡尔曼滤波器,在每个时间步收集状态估计值和相关的误差协方差。该阶段通过提供初始状态估计值和不确定性度量奠定了基础,这些估计值和度量仅基于截至每个时间点的历史数据。
前向传递完成后,后向传递开始。算法从最终状态估计值向初始状态估计值反向运行。在每个时间步,RTS(Rauch-Tung-Striebel)通过整合来自未来时间步的信息来修正状态估计值——这些信息在前向滤波过程中是不可用的。它利用前向传递中计算出的卡尔曼增益、转移矩阵和协方差来计算一个平滑估计值,该估计值平衡了过去和未来的观测值。这种后向递归修正了滤波后的估计值,减少了总体估计误差,并产生了更一致、更准确的系统状态轨迹。
从数学角度来看,平滑器应用了一个校正步骤,该步骤利用了连续估计值之间误差的相关性。通过线性高斯过程对系统演化进行建模,RTS平滑器假定与卡尔曼滤波器中使用的动力学和测量模型相同。它在每个步骤计算一个平滑增益,该增益决定了未来估计值应在多大程度上用于调整当前估计值。该增益取决于滤波估计值的协方差矩阵和预测状态。
RTS(Rauch-Tung-Striebel)的优势
RTS 平滑器为整个系统状态序列生成全局最优估计。它假设模型是线性的和高斯的。滤波仅估计当前状态。平滑使用所有可用数据重建最佳过去状态估计。这使得平滑对于离线应用尤其有价值。
RTS 平滑器在各种领域都有应用,包括航空航天导航、信号处理、金融和机器人技术。例如,在惯性导航系统 (INS) 中,它通常用于后处理轨迹数据以减少漂移和噪声。同样,时间序列分析或对象跟踪使用它来优化实时估计并恢复准确的路径或趋势。
RTS 平滑器具有优势,但需要完全数据集访问,并且对于长数据或复杂数据,计算量会变得很大。它还严重依赖于线性动力学和高斯噪声的假设。当系统是非线性的或噪声是非高斯的时,使用扩展或无迹 RTS 平滑器。这些变体将该方法调整为非线性滤波器,如扩展卡尔曼滤波器 (EKF) 或无迹卡尔曼滤波器 (UKF)。
RTS 平滑器通过使用未来数据更新过去估计来优化卡尔曼滤波,从而提高精度和稳定性。它构成了状态估计的基础,并能够使用后处理数据精确重建动态系统。
Qinertia GNSS+INS PPK 软件
Qinertia PPK 软件在高精度定位解决方案中提供了一个全新的水平。通过后处理原始位置数据,在您的工作流程中实现无与伦比的精度。
发现 all features