Scopri i nostri sensori dotati dell'algoritmo di navigazione di ultima generazione.


RTS: Rauch–Tung–Striebel
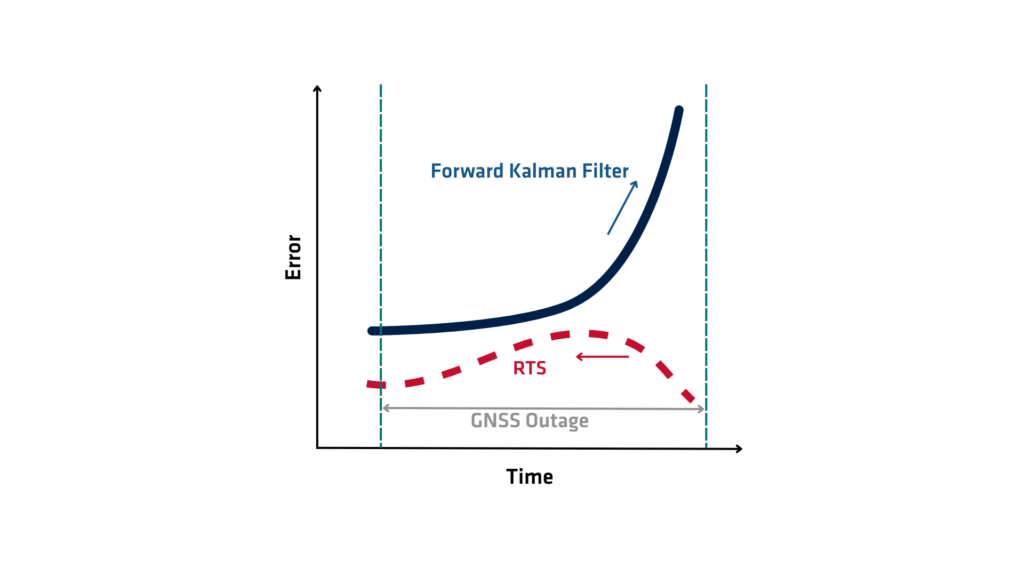
Lo smoother RTS (Rauch-Tung-Striebel) è un algoritmo matematico utilizzato per migliorare l'accuratezza della stima dello stato nei sistemi dinamici. Appartiene alla famiglia degli algoritmi di smoothing ed estende le capacità del filtro di Kalman, che stima lo stato di un sistema in tempo reale. Mentre il filtro di Kalman elabora i dati in modo sequenziale e stima lo stato corrente basandosi esclusivamente sulle misurazioni passate e presenti, lo smoother RTS fa un ulteriore passo avanti utilizzando sia le misurazioni passate che quelle future per perfezionare le stime dello stato retrospettivamente. Questo processo si traduce in stime dello stato significativamente più accurate, soprattutto nelle applicazioni che prevedono la post-elaborazione dei dati.
Come funziona l'RTS?
Lo smoother RTS (Rauch-Tung-Striebel) opera in due fasi principali: il passaggio in avanti (forward pass) e il passaggio all'indietro (backward pass). Durante il passaggio in avanti, l'algoritmo esegue un filtro di Kalman standard sui dati, raccogliendo le stime dello stato e le covarianze di errore associate a ogni passo temporale. Questa fase pone essenzialmente le basi fornendo le stime dello stato iniziale e le misure di incertezza, basate esclusivamente sui dati passati fino a ogni punto nel tempo.
Una volta completato il passaggio in avanti, inizia il passaggio all'indietro. L'algoritmo procede all'indietro, dalla stima dello stato finale verso quella iniziale. A ogni passo temporale, l'RTS (Rauch-Tung-Striebel) rivede la stima dello stato incorporando informazioni dai passi temporali futuri, informazioni che non erano disponibili durante il processo di filtraggio in avanti. Utilizza il guadagno di Kalman, le matrici di transizione e le covarianze calcolate nel passaggio in avanti per calcolare una stima livellata (smoothed) che bilancia osservazioni passate e future. Questa ricorsione all'indietro corregge le stime filtrate, riducendo l'errore di stima complessivo e producendo una traiettoria più consistente e accurata degli stati del sistema.
Matematicamente, lo smoother applica un passo di correzione che sfrutta la correlazione tra gli errori nelle stime successive. Modellando l'evoluzione del sistema attraverso un processo gaussiano lineare, lo smoother RTS assume le stesse dinamiche e gli stessi modelli di misura utilizzati nel filtro di Kalman. Calcola un guadagno di livellamento (smoothing gain) a ogni passo, che determina quanto della stima futura debba essere utilizzato per aggiustare la stima corrente. Questo guadagno dipende dalle matrici di covarianza delle stime filtrate e dello stato previsto.
Vantaggi di RTS (Rauch-Tung-Striebel)
Il RTS smoother produce una stima globalmente ottimale per l'intera sequenza degli stati del sistema. Presuppone che i modelli siano lineari e Gaussiani. Il filtraggio stima solo lo stato attuale. Lo smoothing ricostruisce le migliori stime degli stati passati utilizzando tutti i dati disponibili. Ciò rende lo smoothing particolarmente prezioso per le applicazioni offline.
Il RTS smoother trova applicazione in vari settori, tra cui la navigazione aerospaziale, l'elaborazione del segnale, la finanza e la robotica. Nei sistemi di navigazione inerziale (INS), ad esempio, viene spesso utilizzato per la post-elaborazione dei dati di traiettoria al fine di ridurre la deriva e il rumore. Allo stesso modo, l'analisi delle serie temporali o il tracciamento degli oggetti lo utilizzano per affinare le stime in tempo reale e recuperare percorsi o tendenze accurate.
Il RTS smoother offre vantaggi ma richiede l'accesso completo al dataset e diventa computazionalmente intensivo per dati lunghi o complessi. Si basa anche fortemente sull'assunzione di dinamiche lineari e rumore Gaussiano. Utilizzare l'Extended o Unscented RTS smoother quando il sistema è non lineare o il rumore non è Gaussiano. Queste varianti adattano il metodo a filtri non lineari come l'Extended Kalman Filter (EKF) o l'Unscented Kalman Filter (UKF).
Il RTS smoother affina il filtraggio di Kalman utilizzando dati futuri per aggiornare le stime passate, migliorando precisione e stabilità. Costituisce la base della stima dello stato e consente la ricostruzione precisa di sistemi dinamici utilizzando dati post-elaborati.
Software Qinertia GNSS+INS PPK
Il software Qinertia PPK offre un livello completamente nuovo nelle soluzioni di posizionamento ad alta precisione. Ottieni una precisione senza precedenti nei tuoi flussi di lavoro post-elaborando i tuoi dati di localizzazione grezzi.
Scopri tutte le funzionalità