Conheça nossos sensores com o algoritmo de navegação de última geração.


RTS: Rauch–Tung–Striebel
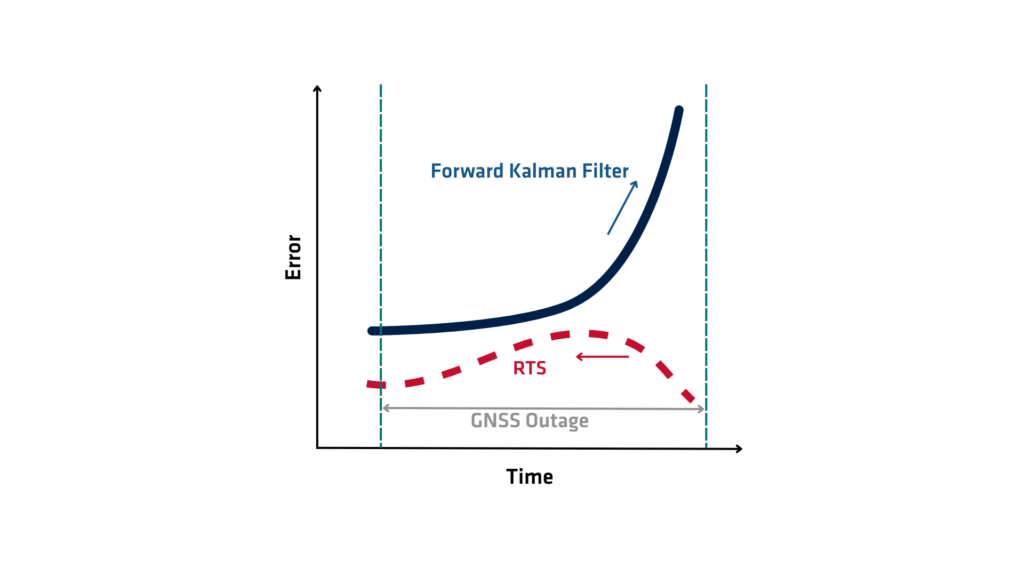
O suavizador RTS (Rauch-Tung-Striebel) é um algoritmo matemático usado para melhorar a precisão da estimativa de estado em sistemas dinâmicos. Ele pertence à família de algoritmos de suavização e estende os recursos do filtro de Kalman, que estima o estado de um sistema em tempo real. Enquanto o filtro de Kalman processa os dados sequencialmente e estima o estado atual com base apenas em medições passadas e presentes, o suavizador RTS vai um passo além, usando medições passadas e futuras para refinar as estimativas de estado retrospectivamente. Este processo resulta em estimativas de estado significativamente mais precisas, especialmente em aplicações que envolvem o pós-processamento de dados.
Como funciona o RTS?
O suavizador RTS (Rauch-Tung-Striebel) opera em duas etapas principais: a passagem direta e a passagem reversa. Durante a passagem direta, o algoritmo executa um filtro de Kalman padrão através dos dados, coletando estimativas do estado e covariâncias de erro associadas a cada passo de tempo. Esta etapa essencialmente estabelece as bases, fornecendo as estimativas iniciais do estado e as medidas de incerteza, baseadas apenas em dados passados até cada ponto no tempo.
Uma vez concluída a passagem direta, a passagem reversa começa. O algoritmo retrocede da estimativa de estado final em direção à inicial. A cada passo de tempo, o RTS (Rauch-Tung-Striebel) revisa a estimativa de estado incorporando informações de passos de tempo futuros — informações que não estavam disponíveis durante o processo de filtragem direta. Ele utiliza o ganho de Kalman, as matrizes de transição e as covariâncias calculadas na passagem direta para computar uma estimativa suavizada que equilibra observações passadas e futuras. Esta recursão reversa corrige as estimativas filtradas, reduzindo o erro de estimação geral e produzindo uma trajetória mais consistente e precisa dos estados do sistema
Matematicamente, o suavizador aplica uma etapa de correção que aproveita a correlação entre erros em estimativas sucessivas. Ao modelar a evolução do sistema através de um processo gaussiano linear, o suavizador RTS assume as mesmas dinâmicas e modelos de medição utilizados no filtro de Kalman. Ele calcula um ganho de suavização a cada etapa, que determina o quanto da estimativa futura deve ser usado para ajustar a estimativa atual. Este ganho depende das matrizes de covariância das estimativas filtradas e do estado predito.
Vantagens do RTS (Rauch-Tung-Striebel)
O RTS smoother produz uma estimativa globalmente ideal para toda a sequência de estados do sistema. Ele assume que os modelos são lineares e gaussianos. A filtragem estima apenas o estado atual. O suavização reconstrói as melhores estimativas de estado passadas usando todos os dados disponíveis. Isso torna o suavização especialmente valioso para aplicações offline.
O RTS smoother encontra aplicação em vários domínios, incluindo navegação aeroespacial, processamento de sinal, finanças e robótica. Em sistemas de navegação inercial (INS), por exemplo, é frequentemente usado para pós-processar dados de trajetória para reduzir o desvio e o ruído. Da mesma forma, a análise de séries temporais ou o rastreamento de objetos o usa para refinar estimativas em tempo real e recuperar caminhos ou tendências precisos.
O RTS smoother oferece vantagens, mas precisa de acesso total ao conjunto de dados e se torna computacionalmente intensivo para dados longos ou complexos. Ele também depende fortemente da suposição de dinâmica linear e ruído gaussiano. Use o RTS smoother estendido ou não centrado quando o sistema for não linear ou o ruído for não gaussiano. Essas variantes adaptam o método a filtros não lineares, como o Extended Kalman Filter (EKF) ou o Unscented Kalman Filter (UKF).
O RTS smoother refina a filtragem de Kalman usando dados futuros para atualizar estimativas passadas, melhorando a precisão e a estabilidade. Ele forma a base da estimativa de estado e permite a reconstrução precisa de sistemas dinâmicos usando dados pós-processados.
Software PPK GNSS+INS Qinertia
O software Qinertia PPK oferece um nível totalmente novo em soluções de posicionamento de alta precisão. Obtenha precisão incomparável em seus fluxos de trabalho ao pós-processar seus dados de localização brutos.
Descubra todos os recursos