Ознайомтеся з нашими датчиками, оснащеними навігаційним алгоритмом останнього покоління.


RTS: Раух–Тунг–Штрібель
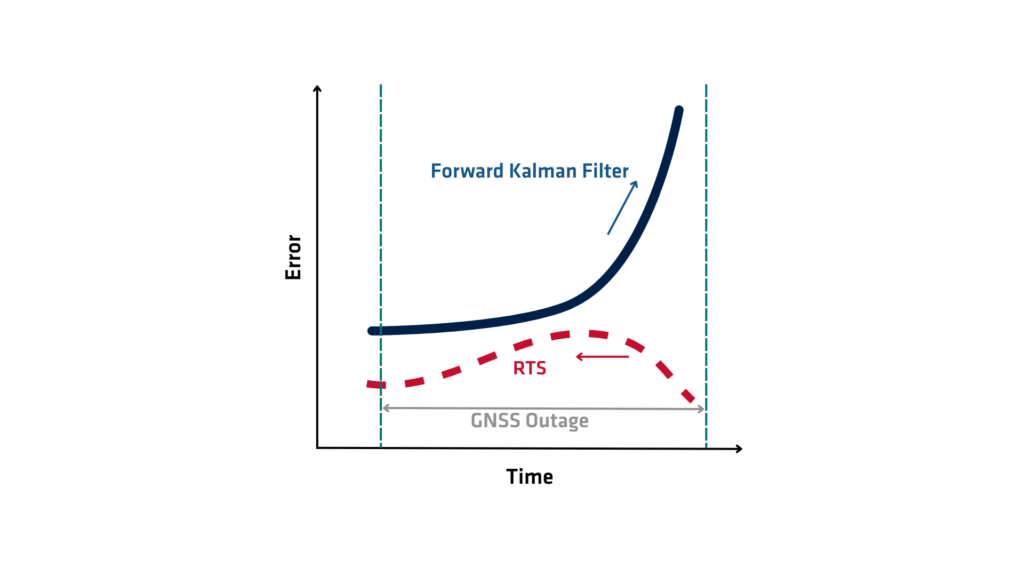
Згладжувач RTS (Rauch-Tung-Striebel) — це математичний алгоритм, що використовується для підвищення точності оцінювання стану в динамічних системах. Він належить до сімейства алгоритмів згладжування та розширює можливості фільтра Калмана, який оцінює стан системи в режимі реального часу. У той час як фільтр Калмана обробляє дані послідовно та оцінює поточний стан виключно на основі минулих і теперішніх вимірювань, згладжувач RTS йде на крок далі, використовуючи як минулі, так і майбутні вимірювання для ретроспективного уточнення оцінок стану. Цей процес забезпечує значно точніші оцінки стану, особливо в додатках, що передбачають постобробку даних.
Як працює RTS?
Алгоритм RTS (Rauch-Tung-Striebel) або згладжувач RTS працює у два основних етапи: прямий прохід і зворотний прохід. Під час прямого проходу алгоритм застосовує до даних стандартний фільтр Калмана, збираючи на кожному часовому кроці оцінки стану та відповідні коваріації похибок. Цей етап, по суті, закладає основу, надаючи початкові оцінки стану та міри невизначеності, що базуються виключно на минулих даних до кожного моменту часу.
Після завершення прямого проходу починається зворотний прохід. Алгоритм рухається назад від остаточної оцінки стану до початкової. На кожному часовому кроці RTS (Rauch-Tung-Striebel) коригує оцінку стану, враховуючи інформацію з майбутніх часових кроків — інформацію, яка була недоступна під час процесу прямого фільтрування. Він використовує коефіцієнт Калмана, матриці переходів та коваріації, обчислені під час прямого проходу, для обчислення згладженої оцінки, яка зрівноважує як минулі, так і майбутні спостереження. Ця зворотна рекурсія коригує відфільтровані оцінки, зменшуючи загальну похибку оцінювання та створюючи більш послідовну та точну траєкторію станів системи
Математично згладжувач застосовує крок корекції, який використовує кореляцію між похибками у послідовних оцінках. Моделюючи еволюцію системи за допомогою лінійного гауссового процесу, згладжувач RTS використовує ті самі моделі динаміки та вимірювання, що й фільтр Калмана. Він обчислює коефіцієнт згладжування на кожному кроці, який визначає, яку частину майбутньої оцінки слід використовувати для коригування поточної оцінки. Цей коефіцієнт залежить від матриць коваріації відфільтрованих оцінок та прогнозованого стану.
Переваги системи RTS (Rauch-Tung-Striebel)
Сгладжувач RTS забезпечує глобально оптимальну оцінку для всього ланцюжка станів системи. Він базується на припущенні, що моделі є лінійними та гаусовими. Фільтрування оцінює лише поточний стан. Сгладжування відтворює найкращі оцінки минулих станів, використовуючи всі наявні дані. Це робить сгладжування особливо цінним для офлайн-застосувань.
Згладжувач RTS знаходить застосування в різних сферах, включаючи аерокосмічну навігацію, обробку сигналів, фінанси та робототехніку. Наприклад, в інерційних навігаційних системах (INS) його часто використовують для постобробки даних траєкторії з метою зменшення дрейфу та шуму. Аналогічно, аналіз часових рядів або відстеження об’єктів використовує його для уточнення оцінок у реальному часі та відновлення точних траєкторій або тенденцій.
Згладжувач RTS має свої переваги, але потребує повного доступу до набору даних і стає обчислювально інтенсивним для довгих або складних даних. Він також значною мірою покладається на припущення про лінійну динаміку та гаусівський шум. Використовуйте розширений або беззапаховий згладжувач RTS, коли система є нелінійною або шум не є гаусівським. Ці варіанти адаптують метод до нелінійних фільтрів, таких як розширений фільтр Калмана (EKF) або беззапаховий фільтр Калмана (UKF).
Згладжувач RTS вдосконалює фільтрацію Калмана, використовуючи майбутні дані для оновлення минулих оцінок, покращуючи точність і стабільність. Він є основою оцінки стану та дозволяє точно реконструювати динамічні системи за допомогою постоброблених даних.
Програмне забезпечення QinertiaINS
Програмне забезпечення Qinertia PPK відкриває абсолютно новий рівень у сфері рішень для високоточного позиціонування. Досягніть безпрецедентної точності у своїх робочих процесах завдяки постобробці необроблених даних про місцезнаходження.
Відкрийте для себе всі функції