최신 세대 내비게이션 알고리즘이 적용된 당사의 센서를 확인해 보세요.


RTS: Rauch–Tung–Striebel
RTS (Rauch-Tung-Striebel) 스무더는 동적 시스템에서 상태 추정의 정확도를 향상시키는 데 사용되는 수학적 알고리즘입니다. 이는 평활화 알고리즘 계열에 속하며 실시간으로 시스템의 상태를 추정하는 칼만 필터의 기능을 확장합니다. 칼만 필터는 데이터를 순차적으로 처리하고 과거 및 현재 측정값만을 기반으로 현재 상태를 추정하는 반면, RTS 스무더는 과거 및 미래 측정값을 모두 사용하여 상태 추정치를 소급하여 개선함으로써 한 단계 더 나아갑니다. 이 프로세스는 특히 데이터 사후 처리가 필요한 애플리케이션에서 훨씬 더 정확한 상태 추정을 제공합니다.
RTS 작동 원리
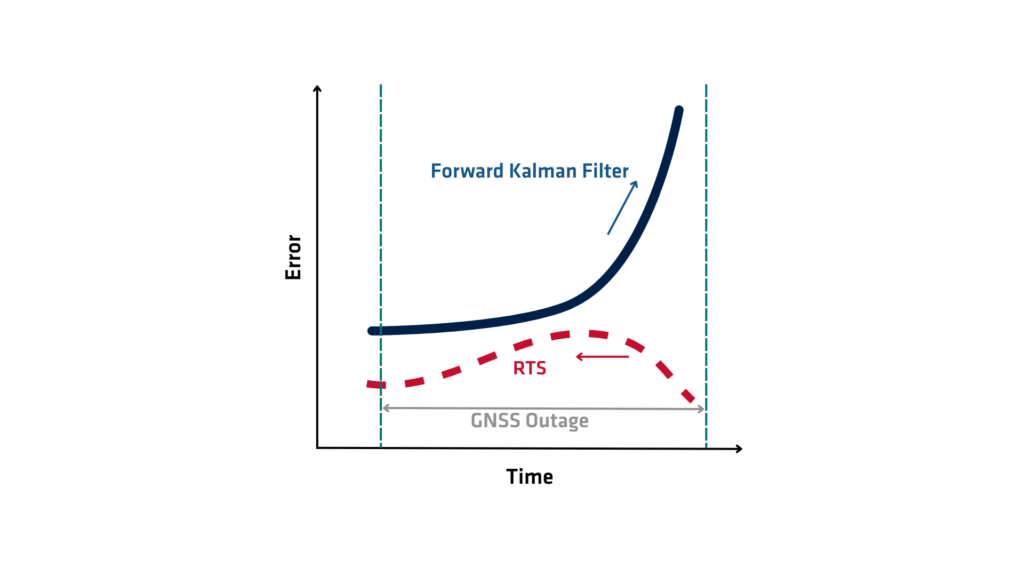
RTS (Rauch-Tung-Striebel) 또는 RTS 스무더는 순방향 패스(forward pass)와 역방향 패스(backward pass)라는 두 가지 주요 단계로 작동합니다. 순방향 패스 동안, 알고리즘은 데이터를 통해 표준 칼만 필터(Kalman filter)를 실행하여 각 시간 단계에서 상태 추정치와 관련 오류 공분산(error covariances)을 수집합니다. 이 단계는 본질적으로 각 시점까지의 과거 데이터만을 기반으로 초기 상태 추정치와 불확실성 측정치를 제공함으로써 기초를 다집니다.
순방향 패스가 완료되면 역방향 패스가 시작됩니다. 알고리즘은 최종 상태 추정치에서 초기 상태 추정치로 역방향으로 진행됩니다. 각 시간 단계에서 RTS (Rauch-Tung-Striebel)는 순방향 필터링 과정에서는 사용할 수 없었던 미래 시간 단계의 정보를 통합하여 상태 추정치를 수정합니다. 이는 순방향 패스에서 계산된 칼만 이득(Kalman gain), 전이 행렬(transition matrices) 및 공분산을 사용하여 과거 및 미래 관측치를 모두 균형 있게 고려하는 평활화된 추정치(smoothed estimate)를 계산합니다. 이 역방향 재귀(backward recursion)는 필터링된 추정치를 수정하여 전체 추정 오차를 줄이고 시스템 상태의 보다 일관되고 정확한 궤적을 생성합니다.
수학적으로, 스무더는 연속적인 추정치 간의 오류 상관관계를 활용하는 보정 단계를 적용합니다. 선형 가우시안 프로세스(linear Gaussian process)를 통해 시스템의 진화를 모델링함으로써, RTS 스무더는 칼만 필터에서 사용된 것과 동일한 동역학 및 측정 모델을 가정합니다. 이는 각 단계에서 평활화 이득(smoothing gain)을 계산하는데, 이 이득은 현재 추정치를 조정하기 위해 미래 추정치의 어느 정도를 사용해야 하는지를 결정합니다. 이 이득은 필터링된 추정치의 공분산 행렬과 예측된 상태에 따라 달라집니다.
RTS (Rauch-Tung-Striebel)의 장점
RTS 스무더는 시스템 상태의 전체 시퀀스에 대해 전역적으로 최적의 추정치를 생성합니다. 이는 모델이 선형이고 가우시안이라고 가정합니다. 필터링은 현재 상태만을 추정하는 반면, 스무딩은 사용 가능한 모든 데이터를 활용하여 과거 상태에 대한 최적의 추정치를 재구성합니다. 이러한 특성으로 인해 스무딩은 오프라인 애플리케이션에 특히 유용합니다.
RTS 스무더는 항공우주 항법, 신호 처리, 금융, 로봇 공학을 포함한 다양한 분야에서 활용됩니다. 예를 들어, INS(관성 항법 시스템)에서는 표류(drift) 및 노이즈(noise)를 줄이기 위해 궤적 데이터를 후처리하는 데 자주 사용됩니다. 마찬가지로, 시계열 분석 또는 객체 추적에서는 실시간 추정치를 정제하고 정확한 경로 또는 추세를 복구하는 데 활용됩니다.
RTS 스무더는 장점이 있지만, 전체 데이터셋 접근이 필요하며 길거나 복잡한 데이터의 경우 계산 집약적입니다. 또한 선형 동역학 및 가우시안 노이즈 가정에 크게 의존합니다. 시스템이 비선형이거나 노이즈가 비가우시안일 경우 확장(Extended) 또는 무향(Unscented) RTS 스무더를 사용해야 합니다. 이러한 변형은 확장 칼만 필터(EKF) 또는 무향 칼만 필터(UKF)와 같은 비선형 필터에 이 방법을 적용합니다.
RTS 스무더는 미래 데이터를 사용하여 과거 추정치를 업데이트함으로써 칼만 필터링을 정제하여 정확도와 안정성을 향상시킵니다. 이는 상태 추정의 기반을 형성하며, 후처리된 데이터를 사용하여 동적 시스템의 정밀한 재구성을 가능하게 합니다.
Qinertia GNSS+INS PPK 소프트웨어
Qinertia PPK 소프트웨어는 고정밀 위치 결정 솔루션에서 완전히 새로운 수준을 제공합니다. 원시 위치 데이터를 후처리하여 워크플로우에서 비할 데 없는 정확도를 달성하십시오.
모든 기능 알아보기