Zapoznaj się z naszymi czujnikami wyposażonymi w algorytm nawigacyjny najnowszej generacji.


RTS: Rauch–Tung–Striebel
Wygładzanie RTS (Rauch-Tung-Striebel) to algorytm matematyczny używany do poprawy dokładności estymacji stanu w systemach dynamicznych. Należy do rodziny algorytmów wygładzających i rozszerza możliwości filtra Kalmana, który szacuje stan systemu w czasie rzeczywistym. Podczas gdy filtr Kalmana przetwarza dane sekwencyjnie i szacuje bieżący stan wyłącznie na podstawie przeszłych i obecnych pomiarów, wygładzanie RTS idzie o krok dalej, wykorzystując zarówno przeszłe, jak i przyszłe pomiary do retrospektywnego udoskonalenia estymacji stanu. Ten proces skutkuje znacznie dokładniejszymi estymacjami stanu, szczególnie w zastosowaniach, które obejmują post-processing danych.
Jak działa RTS?
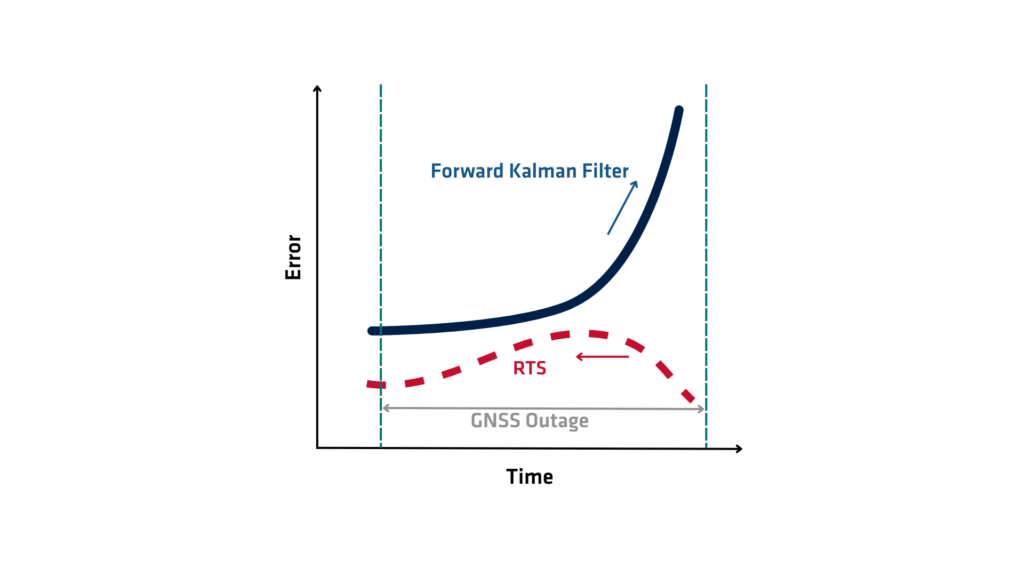
Wygładzacz RTS (Rauch-Tung-Striebel) działa w dwóch głównych etapach: przebiegu do przodu i przebiegu wstecznego. Podczas przebiegu do przodu algorytm uruchamia standardowy filtr Kalmana na danych, zbierając estymaty stanu i związane z nimi kowariancje błędów w każdym kroku czasowym. Etap ten zasadniczo przygotowuje grunt, dostarczając początkowe estymaty stanu i miary niepewności, oparte wyłącznie na danych z przeszłości, aż do każdego punktu w czasie.
Po zakończeniu przebiegu do przodu rozpoczyna się przebieg wsteczny. Algorytm cofa się od końcowej estymaty stanu w kierunku początkowej. W każdym kroku czasowym RTS (Rauch-Tung-Striebel) koryguje estymatę stanu, uwzględniając informacje z przyszłych kroków czasowych – informacje, które nie były dostępne podczas procesu filtrowania do przodu. Wykorzystuje on wzmocnienie Kalmana, macierze przejścia i kowariancje obliczone w przebiegu do przodu, aby obliczyć wygładzoną estymatę, która równoważy zarówno obserwacje z przeszłości, jak i z przyszłości. Ta rekurencja wsteczna koryguje przefiltrowane estymaty, zmniejszając ogólny błąd estymacji i tworząc bardziej spójną i dokładną trajektorię stanów systemu
Matematycznie, wygładzacz stosuje krok korekcyjny, który wykorzystuje korelację między błędami w kolejnych estymatach. Modelując ewolucję systemu poprzez liniowy proces Gaussa, wygładzacz RTS zakłada te same modele dynamiki i pomiarów, które są używane w filtrze Kalmana. Oblicza on wzmocnienie wygładzające w każdym kroku, które określa, w jakim stopniu przyszła estymata powinna być wykorzystana do skorygowania bieżącej estymaty. Wzmocnienie to zależy od macierzy kowariancji przefiltrowanych estymat i przewidywanego stanu.
Zalety RTS (Rauch-Tung-Striebel)
Wygładzanie RTS (ang. RTS smoother) generuje globalnie optymalne oszacowanie dla całej sekwencji stanów systemu. Zakłada się, że modele są liniowe i gaussowskie. Filtrowanie szacuje tylko bieżący stan. Wygładzanie rekonstruuje najlepsze oszacowania stanów przeszłych, wykorzystując wszystkie dostępne dane. To sprawia, że wygładzanie jest szczególnie cenne w zastosowaniach offline.
Wygładzanie RTS znajduje zastosowanie w różnych dziedzinach, w tym w nawigacji lotniczej, przetwarzaniu sygnałów, finansach i robotyce. Na przykład, w inercyjnych systemach nawigacyjnych (INS) jest często używane do post-processingu danych dotyczących trajektorii w celu redukcji dryftu i szumów. Podobnie, analiza szeregów czasowych lub śledzenie obiektów wykorzystuje je do ulepszania estymacji w czasie rzeczywistym i odzyskiwania dokładnych ścieżek lub trendów.
Wygładzanie RTS oferuje korzyści, ale wymaga pełnego dostępu do zbioru danych i staje się kosztowne obliczeniowo dla długich lub złożonych danych. Opiera się również w dużym stopniu na założeniu liniowej dynamiki i szumu gaussowskiego. Użyj rozszerzonego lub nieukierunkowanego wygładzania RTS, gdy system jest nieliniowy lub szum nie jest gaussowski. Te warianty dostosowują metodę do filtrów nieliniowych, takich jak rozszerzony filtr Kalmana (EKF) lub nieukierunkowany filtr Kalmana (UKF).
Wygładzanie RTS udoskonala filtrowanie Kalmana, wykorzystując przyszłe dane do aktualizacji przeszłych oszacowań, poprawiając dokładność i stabilność. Stanowi podstawę estymacji stanu i umożliwia precyzyjną rekonstrukcję systemów dynamicznych przy użyciu danych po przetworzeniu.
Oprogramowanie Qinertia GNSS+INS PPK
Oprogramowanie Qinertia PPK oferuje zupełnie nowy poziom w rozwiązaniach pozycjonowania o wysokiej precyzji. Osiągnij niezrównaną dokładność w swoich workflow, przetwarzając surowe dane lokalizacyjne.
Odkryj wszystkie funkcje