改进航空制图数据收集
惯性系统,如惯性测量单元(IMU)和惯性导航系统INS),是航空测量的重要组成部分。
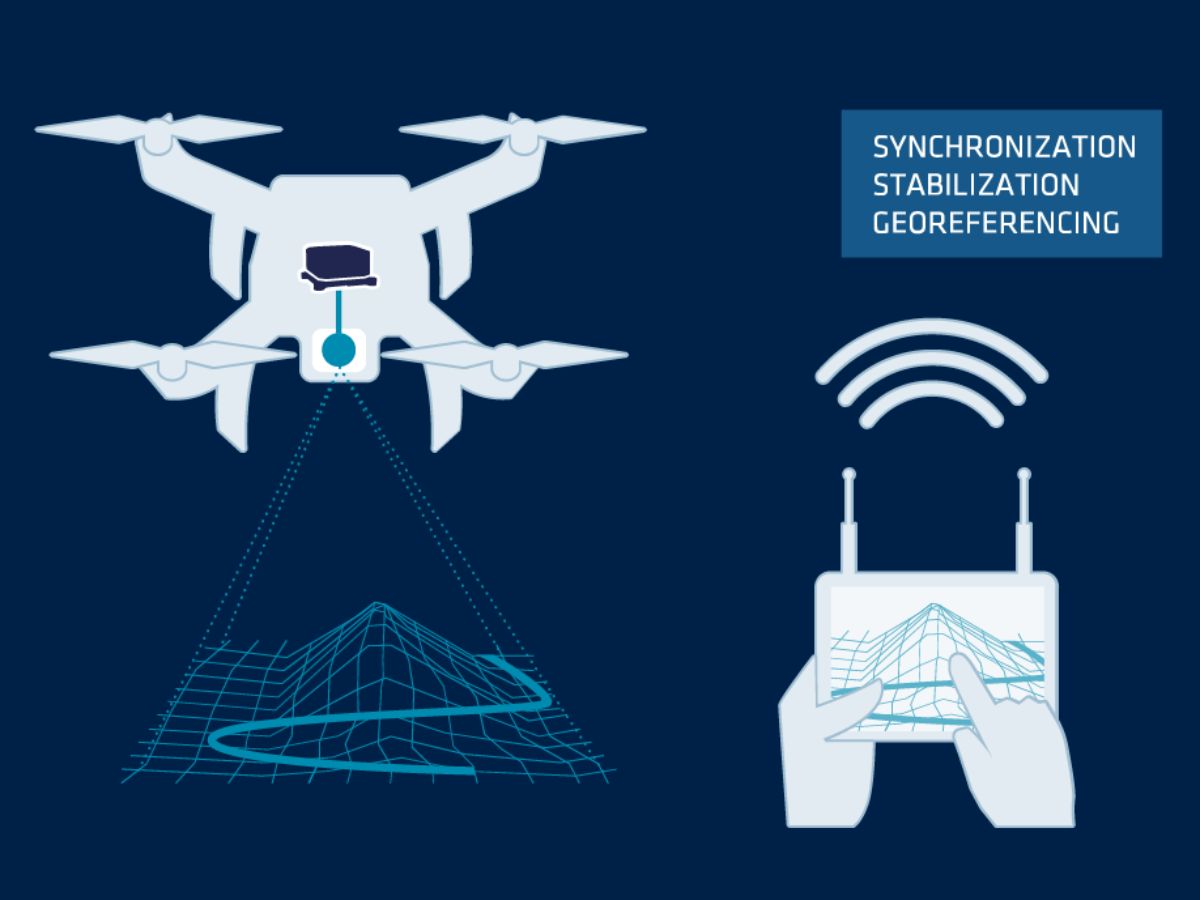
这些系统提供有关飞机方向、位置和移动的实时数据,可对收集到的图像和传感器数据进行精确的地理参照。惯性系统与 GNSS(全球导航卫星系统)一起工作,确保即使在 GNS 信号微弱或不可用的情况下,飞机也能继续收集准确的空间信息。
在航空测量中使用惯性系统的一大优势是能够补偿飞机的运动,如俯仰、翻滚和偏航,这些运动可能会影响所收集数据的质量。通过持续测量飞机的姿态,惯性系统可以纠正图像或传感器数据中的任何失真,确保结果的一致性和准确性。这在激光雷达等应用中尤为重要,因为在这些应用中,轻微的误差就会导致最终数据集出现重大误差。
此外,惯性系统还能在不影响精度的情况下加快数据采集速度,从而提高航测效率。勘测人员可以以更高的高度和更快的速度飞行,在更短的时间内覆盖更多的地面,从而降低运营成本,同时还能获得高质量的结果。
了解我们的解决方案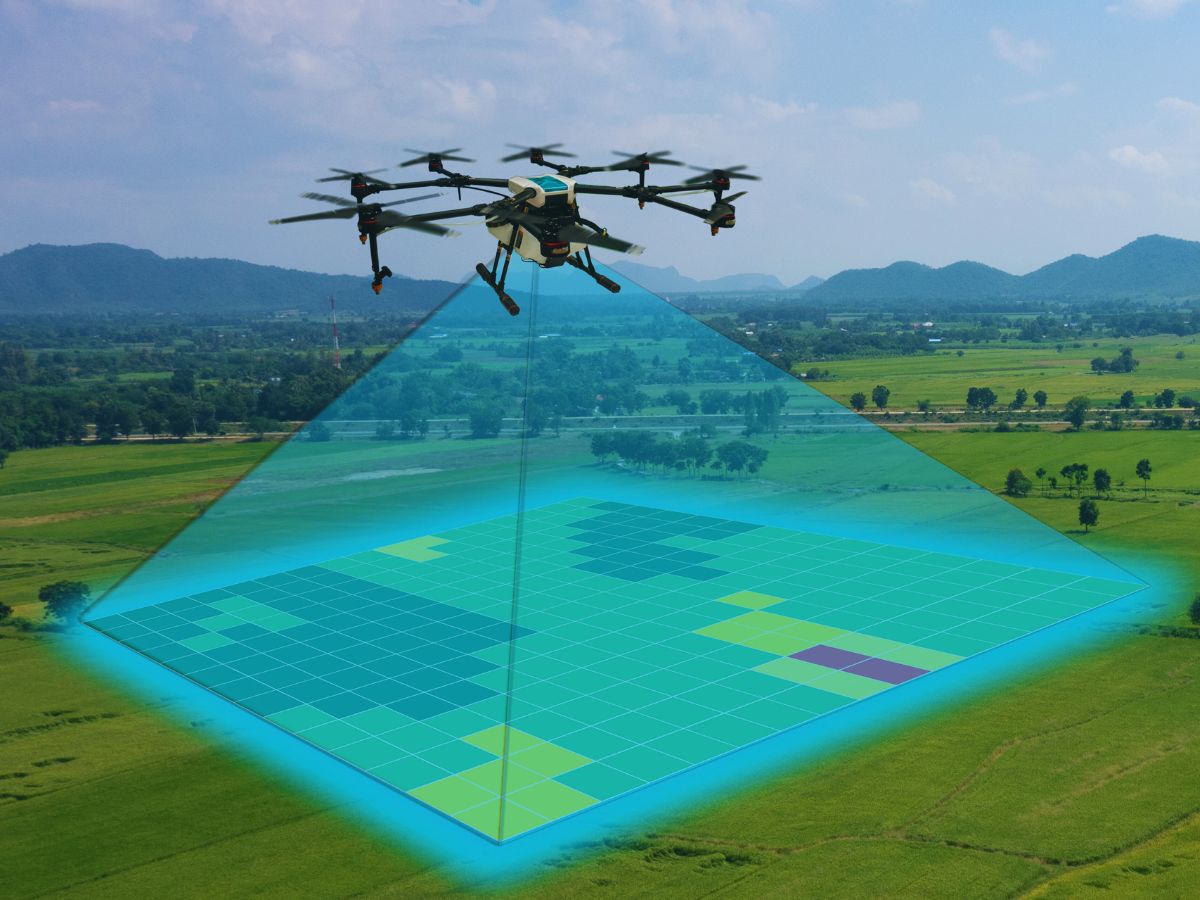
惯性系统在航空测绘中的应用
惯性系统在各种航空测绘应用中发挥着至关重要的作用。例如,走廊测绘涉及公路、铁路或管道等狭长区域的测量。
这使工程师和规划人员能够对基础设施的开发和维护进行精确计算。
在林业和农业领域,惯性INS 帮助无人机或飞机飞越大片区域,收集关键数据。这些数据有助于资源管理、作物监测和环境保护。对森林和田地的精确测绘可改进土地使用、灌溉和收割方面的决策。
在建筑和城市规划中,惯性系统支持的航空测量可提供详细的地形图和三维地形模型。这些数据集对于设计和实施大型项目至关重要,因为它们可以让人们清楚地了解土地的特征和潜在的挑战。此外,惯性系统还能进行实时数据处理,从而加快项目进度并提高决策效率。
航空测量实时定位和导航
在航空测量中,INS 和 GNSS 的结合为实时定位和导航提供了强大的解决方案。无论环境条件如何,这些系统都能协同工作,提供连续、高精度的数据。在密林或cloud 较厚等无法使用全球导航卫星系统的环境中,惯性系统都能保持精确定位。
INS 技术利用加速度计和陀螺仪确定飞机的位置。这些传感器跟踪加速度和旋转运动。当与全球导航卫星系统数据相结合时,就能形成飞机飞行路径和位置的完整视图。这种精确定位可确保所有收集到的数据都具有准确的地理坐标。
实时定位在条件快速变化的动态环境中至关重要,如灾区(如野火)或活跃的建筑工地。它可以对飞行路径和数据采集设置进行实时调整。这种灵活性有助于勘测人员获取最相关的信息。因此,勘测数据的整体质量和实用性都得到了提高。

了解我们的航测解决方案
我们的运动和导航产品专为航空测量应用需求量身定制。我们配备全球导航卫星系统的高性能INS 解决方案可提供实时定位、导航和定向功能。它们可确保航空测量的出色精度和可靠性。
Quanta Extra
QinertiaINS
测量应用手册
将我们的宣传册直接发送到您的收件箱!
案例研究
了解我们的产品如何成功融入世界各地的航测应用。
我们的案例研究展示了SBG Systems公司的惯性系统如何提高航空测绘项目的精度、可靠性和效率。
从大规模基础设施勘测到环境监测,我们的惯性系统已在广泛的应用中证明了其价值。



他们谈论我们
聆听采用我们技术的创新者和客户的第一手资料。
他们的感言和成功案例说明了我们的传感器在实际无人机导航应用中的重大影响。
探索其他测量应用
探索我们先进的惯性导航解决方案在各种测量应用中的全部潜力。我们的技术可支持陆地、空中和海上作业。它可确保在任何环境下都能获得可靠的数据、高精度和一致的性能。
您有问题吗?
欢迎访问我们的常见问题版块!在这里,您可以找到有关我们展示的应用程序的最常见问题的答案。如果您没有找到所需的信息,请直接与我们联系!
如何结合惯性系统和激光雷达进行无人机测绘?
将SBG Systems公司的惯性系统与用于无人机测绘的激光雷达相结合,可提高获取精确地理空间数据的准确性和可靠性。
以下是集成的工作原理,以及它如何为无人机制图带来益处:
- 一种遥感方法,利用激光脉冲测量地球表面的距离,绘制详细的三维地形图或结构图。
- SBG Systems INS 将惯性测量单元IMU) 与全球导航卫星系统IMUGNSS) 数据相结合,即使在缺乏 GNSS 的环境中也能提供精确的定位、定向(俯仰、滚动、偏航)和速度。
SBG 的惯性系统与激光雷达数据同步。INS 可精确跟踪无人机的位置和方向,而 LiDAR 可捕捉下方地形或物体的细节。
通过了解无人机的精确方位,可以在三维空间中准确定位激光雷达数据。
全球导航卫星系统组件提供全球定位,而IMU 则提供实时方向和移动数据。两者的结合确保了即使在全球导航卫星系统信号微弱或不可用的情况下(例如在高楼或茂密森林附近),INS 也能继续跟踪无人机的路径和位置,从而实现一致的激光雷达测绘。
什么是航空测量中的地理参照?
地理参照是将地理数据(如地图、卫星图像或航空摄影)与已知坐标系对齐的过程,以便将其准确放置在地球表面。
这样,数据就可以与其他空间信息整合,从而进行精确的定位分析和制图。
在测量方面,地理参照对于确保将激光雷达、相机或无人机上的传感器等工具收集的数据准确映射到现实世界的坐标上至关重要。
通过为每个数据点分配纬度、经度和海拔高度,地理参照可确保采集的数据反映地球上的确切位置和方向,这对于地理空间制图、环境监测和建筑规划等应用至关重要。
地理参照通常涉及使用已知坐标的控制点(通常通过全球导航卫星系统或地面测量获得),使采集的数据与坐标系统保持一致。
这一过程对于创建准确、可靠和可用的空间数据集至关重要。
什么是摄影测量?
摄影测量是利用照片测量和绘制物体或环境的距离、尺寸和特征的科学和技术。通过分析从不同角度拍摄的重叠图像,摄影测量可以创建精确的三维模型、地图或测量结果。这一过程的工作原理是利用三角测量原理,识别多张照片中的共同点,并计算它们在空间中的位置。
摄影测量广泛应用于各个领域,例如:
- 摄影测量地形制图:绘制景观和城市地区的三维地图。
- 建筑与工程:用于建筑文件和结构分析。
- 考古学中的摄影测量:记录并重建遗址和文物。
- 航空摄影测量:用于土地测量和建筑规划。
- 林业和农业:监测作物、森林和土地利用变化。
摄影测量与现代无人机或UAV(无人驾驶飞行器)相结合,可以快速收集航空图像,成为大型测量、建筑和环境监测项目的有效工具。