Hyperloop Challenge
Il team UCI ha utilizzato l'INS miniaturizzato Ellipse-N per misurare la posizione, la velocità e l'accelerazione del proprio pod.
“Siamo rimasti più che soddisfatti dei risultati che Ellipse-N ci ha fornito. È stata la fonte di dati più affidabile che abbiamo ottenuto.” | Andrew T., Capitano del team HyperXite

HyperXite, il team dell'università UCI, ha partecipato alla seconda competizione Hyperloop e si è classificato al 1° posto tra i team Hyperloop All-American e al 2° posto nel mondo per la levitazione a base d'aria. Hanno utilizzato l'INS miniaturizzato Ellipse-N per misurare la posizione, la velocità e l'accelerazione del loro pod.
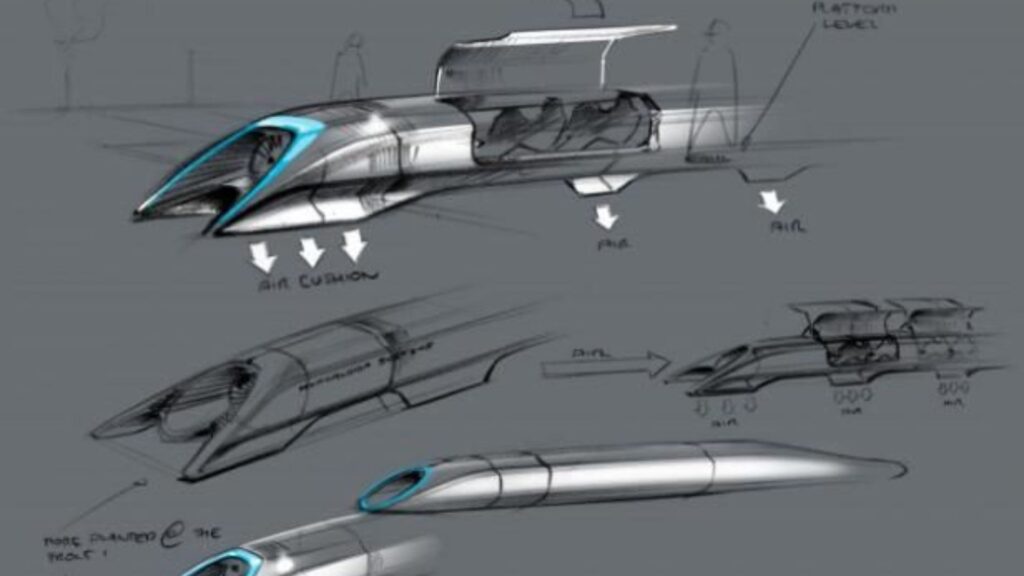
Concetto Hyperloop
L'Hyperloop è un concetto straordinario che mira ad aumentare l'efficienza del trasporto. L'Hyperloop è costituito da un tubo sigillato attraverso il quale un pod può viaggiare libero dalla resistenza dell'aria o dall'attrito, trasportando persone o oggetti ad alta velocità pur essendo molto efficiente.
Nel 2015, SpaceX ha sponsorizzato la prima Hyperloop Pod Competition in cui i team hanno costruito un prototipo in scala ridotta per dimostrare la fattibilità tecnica di vari aspetti del concetto Hyperloop. HyperXite, il team dell'Università della California, Irvine (UCI) ha partecipato alla seconda competizione Hyperloop con l'Ellipse-N di SBG Systems.
La Competizione II è ora terminata e HyperXite si è classificato al 1° posto tra i team Hyperloop americani e al 2° posto a livello mondiale per la levitazione pneumatica. Il team di successo è uno dei soli sei team al mondo ad aver percorso l'intero tubo Hyperloop fino all'aria aperta.
Il team UCI « Hyperxite», alla competizione Hyperloop
Gli studenti dell'UCI hanno progettato un veicolo tubolare per viaggiare in modo efficiente ad alta velocità attraverso un tubo quasi sottovuoto. Inoltre, il pod utilizza fibra di carbonio leggera e sistemi avanzati per levitare, trasportare passeggeri e fermarsi in sicurezza.
La competizione si svolge su una pista di prova di un miglio nel sud della California. Inoltre, ogni pod accelera per raggiungere la velocità massima, riportata in tempo reale, e poi decelera frenando.
Infine, i giudici valutano i pod per velocità, stabilità, frenata e fluidità.
Posizione, velocità e accelerazione del pod
"Il nostro prototipo di pod aveva bisogno di un modo affidabile per misurare la sua posizione, velocità e accelerazione quando il pod si trova nel tubo a vuoto Hyperloop di SpaceX", spiega Andrew Tec, Capitano del team HyperXite.
Se inizialmente il team aveva il concetto di implementare la sensor fusion con più accelerometri e encoder rotativi per stimare il comportamento del pod, l'Ellipse-N ha fornito tutte queste funzionalità con una precisione di livello industriale (0,1° rollio/beccheggio) e in un piccolo pacchetto.
Il sensore inerziale offriva ulteriori preziose funzionalità come il posizionamento GNSS e il protocollo bus CAN.

"Avevamo bisogno di un componente che funzionasse bene in condizioni di quasi vuoto, uno che fosse facile da integrare con sensori precisi; l'Ellipse-N ha soddisfatto tutti i criteri." | Andrew T., Capitano del team HyperXite
L'integrazione rapida e semplice di Ellipse-N
Il team stava sviluppando utilizzando un controller Compact RIO di National Instrument e ha trovato il plugin pubblico LabVIEW di SBG molto conveniente; ha reso i test e lo sviluppo estremamente facili e veloci.
“Siamo rimasti più che soddisfatti dei risultati che l'Ellipse-N ci ha fornito. È stata la fonte di dati più affidabile che abbiamo ottenuto. Il comportamento della macchina a stati del nostro pod si basava fortemente sul suo profilo di traiettoria stimato e sul tempo” conclude il Capitano del team.
SpaceX ha annunciato la terza competizione che si terrà nel 2018. Inoltre, HyperXite competerà con un pod di nuova concezione per soddisfare le regole aggiornate della Hyperloop Competition.

Ellipse-N
Ellipse-N è un sistema di navigazione inerziale RTK compatto e ad alte prestazioni con un ricevitore GNSS dual-band e quad-costellazione integrato. Inoltre, fornisce rollio, beccheggio, prua, heave e posizionamento GNSS a livello centimetrico.
Il sensore Ellipse-N eccelle in ambienti dinamici e in condizioni GNSS difficili. Inoltre, opera efficacemente in applicazioni a dinamica inferiore utilizzando l'orientamento magnetico.

Richiedi un preventivo per Ellipse-N
Ha delle domande?
Benvenuti nella nostra sezione FAQ! Qui troverete le risposte alle domande più comuni sulle applicazioni che presentiamo. Se non trovate quello che state cercando, non esitate a contattarci direttamente!
Cos'è GNSS rispetto a GPS?
GNSS sta per Global Navigation Satellite System e GPS per Global Positioning System. Questi termini sono spesso usati in modo intercambiabile, ma si riferiscono a concetti diversi all'interno dei sistemi di navigazione satellitare.
GNSS è un termine collettivo per tutti i sistemi di navigazione satellitare, mentre il GPS si riferisce specificamente al sistema statunitense. Include diversi sistemi che forniscono una copertura globale più completa, mentre il GPS è solo uno di questi sistemi.
Si ottiene una maggiore accuratezza e affidabilità con GNSS, integrando i dati provenienti da più sistemi, mentre il solo GPS potrebbe avere delle limitazioni a seconda della disponibilità dei satelliti e delle condizioni ambientali.
Qual è la differenza tra AHRS e INS?
La principale differenza tra un Attitude and Heading Reference System (AHRS) e un Inertial Navigation System (INS) risiede nella loro funzionalità e nella portata dei dati che forniscono.
AHRS fornisce informazioni sull'orientamento, in particolare, l'assetto (beccheggio, rollio) e l'heading (imbardata) di un veicolo o dispositivo. In genere utilizza una combinazione di sensori, tra cui giroscopi, accelerometri e magnetometri, per calcolare e stabilizzare l'orientamento. L'AHRS restituisce la posizione angolare su tre assi (beccheggio, rollio e imbardata), consentendo a un sistema di comprendere il proprio orientamento nello spazio. Viene spesso utilizzato in aviazione, UAV, robotica e sistemi marini per fornire dati accurati di assetto e heading, fondamentali per il controllo e la stabilizzazione del veicolo.
Un INS non solo fornisce dati di orientamento (come un AHRS) ma traccia anche la posizione, la velocità e l'accelerazione di un veicolo nel tempo. Utilizza sensori inerziali per stimare il movimento nello spazio 3D senza fare affidamento su riferimenti esterni come il GNSS. Combina i sensori presenti negli AHRS (giroscopi, accelerometri) ma può anche includere algoritmi più avanzati per il tracciamento di posizione e velocità, spesso integrandosi con dati esterni come il GNSS per una maggiore precisione.
In sintesi, l'AHRS si concentra sull'orientamento (assetto e prua), mentre l'INS fornisce una suite completa di dati di navigazione, inclusi posizione, velocità e orientamento.
Qual è la differenza tra IMU e INS?
La differenza tra un'unità di misura inerziale (IMU) e un sistema di navigazione inerziale (INS) risiede nella loro funzionalità e complessità.
IMU unità di misura inerziale) fornisce dati grezzi sull'accelerazione lineare e sulla velocità angolare del veicolo, misurati da accelerometri e giroscopi. Fornisce informazioni su rollio, beccheggio, imbardata e movimento, ma non calcola la posizione né i dati di navigazione. IMU progettata specificamente per trasmettere dati essenziali sul movimento e sull'orientamento affinché vengano elaborati esternamente per determinare la posizione o la velocità.
D'altra parte, un INS sistema di navigazione inerziale) combina IMU con algoritmi avanzati per calcolare la posizione, la velocità e l'orientamento di un veicolo nel tempo. Incorpora algoritmi di navigazione come il filtro di Kalman per la fusione e l'integrazione dei sensori. Un INS dati di navigazione in tempo reale, tra cui posizione, velocità e orientamento, senza fare affidamento su sistemi di posizionamento esterni come GNSS.
Questo sistema di navigazione viene tipicamente utilizzato in applicazioni che richiedono soluzioni di navigazione complete, in particolare in ambienti GNSS, come UAV militari, navi e sottomarini.
L'INS accetta input da sensori di ausilio esterni?
I sistemi di navigazione inerziale della nostra azienda accettano input da sensori di ausilio esterni, come sensori di dati aerei, magnetometri, odometri, DVL e altri.
Questa integrazione rende l'INS altamente versatile e affidabile, specialmente in ambienti privi di GNSS.
Questi sensori esterni migliorano le prestazioni complessive e la precisione dell'INS fornendo dati complementari.
