Desafio Hyperloop
A equipe da UCI usou o INS miniaturizado Ellipse-N para medir a posição, velocidade e aceleração de seu pod.
“Ficamos mais do que satisfeitos com os resultados que o Ellipse-N nos deu. Foi a fonte de dados mais confiável que obtivemos.” | Andrew T., Capitão da equipe HyperXite

A HyperXite, a equipe da universidade UCI, participou da segunda competição Hyperloop e ficou em 1º lugar entre as equipes Hyperloop americanas e em 2º lugar no mundo em Levitação Aérea. Eles usaram o INS Ellipse-N em miniatura para medir a posição, velocidade e aceleração de seu pod.
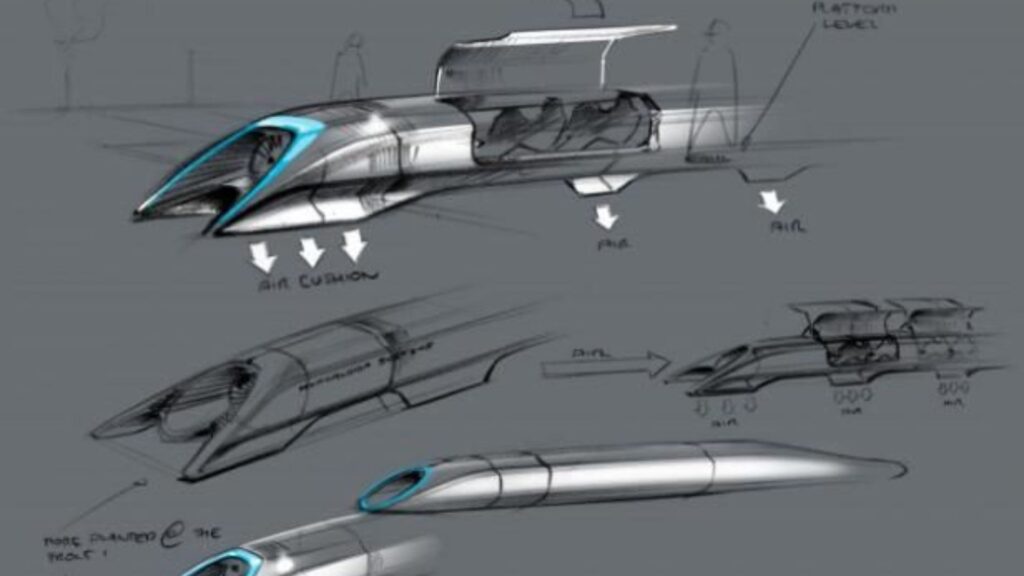
Conceito Hyperloop
O Hyperloop é um conceito incrível que visa aumentar a eficiência do transporte. O Hyperloop é feito de um tubo selado através do qual um pod pode viajar livre de resistência do ar ou atrito, transportando pessoas ou objetos em alta velocidade, sendo muito eficiente.
Em 2015, a SpaceX patrocinou a primeira Hyperloop Pod Competition, onde as equipes construíram um protótipo em subescala para demonstrar a viabilidade técnica de vários aspectos do conceito Hyperloop. A HyperXite, equipe da Universidade da Califórnia, Irvine (UCI), participou da segunda competição Hyperloop com o Ellipse-N da SBG Systems.
A Competição II foi concluída e a HyperXite ocupa a primeira posição entre as equipes norte-americanas de Hyperloop, e a segunda no mundo em levitação por ar. A equipe vitoriosa é uma das seis únicas equipes em todo o mundo a conseguir atravessar todo o tubo do Hyperloop até o ar livre.
A equipe da UCI « Hyperxite», na competição Hyperloop
Alunos da UCI projetaram um veículo tubular para viajar de forma eficiente em alta velocidade através de um tubo quase a vácuo. Além disso, o pod usa fibra de carbono leve e sistemas avançados para levitar, transportar passageiros e parar com segurança.
A competição acontece em uma pista de teste de uma milha no sul da Califórnia. Além disso, cada pod acelera para atingir a velocidade máxima, relatada em tempo real, e depois desacelera por meio da frenagem.
Finalmente, os juízes avaliam os pods quanto à velocidade, estabilidade, frenagem e suavidade.
Posição, Velocidade e Aceleração do Pod
“Nossa cápsula protótipo precisava de uma maneira confiável de medir sua posição, velocidade e aceleração quando a cápsula estivesse no tubo de vácuo Hyperloop da SpaceX”, explica Andrew Tec, capitão da equipe HyperXite.
Se a equipe inicialmente teve o conceito de implementar a fusão de sensores com vários acelerômetros e encoders rotativos para estimar o comportamento da cápsula, o Ellipse-N forneceu todos esses recursos com precisão de nível industrial (0,1° roll/pitch) e em um pacote pequeno.
O sensor inercial ofereceu recursos adicionais valiosos, como o posicionamento GNSS e o protocolo de barramento CAN.

“Precisávamos de um componente que tivesse um bom desempenho em condições de quase vácuo, que fosse fácil de integrar com sensores precisos; o Ellipse-N satisfez todos os critérios.” | Andrew T., Capitão da equipe HyperXite
A integração rápida e fácil do Ellipse-N
A equipe estava desenvolvendo usando um controlador Compact RIO da National Instruments e achou o plugin público LabVIEW da SBG muito conveniente; isso tornou o teste e o desenvolvimento tremendamente fáceis e rápidos.
“Ficamos mais do que satisfeitos com os resultados que o Ellipse-N nos deu. Foi a fonte de dados mais confiável que obtivemos. O comportamento da máquina de estados do nosso pod dependia muito de seu perfil de trajetória estimado e do tempo”, conclui o capitão da equipe.
A SpaceX anunciou a terceira competição a ser realizada em 2018. Além disso, o HyperXite competirá com um pod recém-projetado para atender às regras atualizadas da Competição Hyperloop.

Ellipse-N
O Ellipse-N é um Sistema de Navegação Inercial RTK compacto e de alto desempenho com um receptor GNSS de banda dupla e constelação quádrupla integrado. Além disso, ele fornece roll, pitch, heading, heave e posicionamento GNSS em nível de centímetro.
O sensor Ellipse-N se destaca em ambientes dinâmicos e condições GNSS adversas. Além disso, ele opera efetivamente em aplicações dinâmicas mais baixas usando heading magnético.

Solicite uma cotação para o Ellipse-N
Você tem perguntas?
Bem-vindo à nossa seção de FAQ! Aqui, você encontrará respostas para as perguntas mais comuns sobre as aplicações que apresentamos. Se você não encontrar o que procura, sinta-se à vontade para nos contatar diretamente!
O que é GNSS vs GPS?
GNSS significa Global Navigation Satellite System e GPS para Global Positioning System. Esses termos são frequentemente usados de forma intercambiável, mas se referem a conceitos distintos dentro dos sistemas de navegação baseados em satélite.
GNSS é um termo coletivo para todos os sistemas de navegação por satélite, enquanto o GPS se refere especificamente ao sistema dos EUA. Ele abrange múltiplos sistemas que fornecem uma cobertura global mais abrangente, enquanto o GPS é apenas um desses sistemas.
Você obtém maior precisão e confiabilidade com o GNSS, integrando dados de vários sistemas, enquanto o GPS sozinho pode ter limitações dependendo da disponibilidade de satélites e das condições ambientais.
Qual é a diferença entre AHRS e INS?
A principal diferença entre um Attitude and Heading Reference System (AHRS) e um Inertial Navigation System (INS) reside em sua funcionalidade e no escopo dos dados que eles fornecem.
O AHRS fornece informações de orientação — especificamente, a atitude (inclinação, rotação) e direção (guinada) de um veículo ou dispositivo. Ele normalmente usa uma combinação de sensores, incluindo giroscópios, acelerômetros e magnetômetros, para calcular e estabilizar a orientação. O AHRS emite a posição angular em três eixos (inclinação, rotação e guinada), permitindo que um sistema entenda sua orientação no espaço. É frequentemente usado em aviação, UAVs, robótica e sistemas marítimos para fornecer dados precisos de atitude e direção, o que é fundamental para o controle e estabilização do veículo.
Um INS não apenas fornece dados de orientação (como um AHRS), mas também rastreia a posição, velocidade e aceleração de um veículo ao longo do tempo. Ele usa sensores inerciais para estimar o movimento no espaço 3D sem depender de referências externas como GNSS. Ele combina os sensores encontrados em AHRS (giroscópios, acelerômetros), mas também pode incluir algoritmos mais avançados para rastreamento de posição e velocidade, muitas vezes integrando-se com dados externos como GNSS para maior precisão.
Em resumo, o AHRS se concentra na orientação (atitude e direção), enquanto o INS fornece um conjunto completo de dados de navegação, incluindo posição, velocidade e orientação.
Qual é a diferença entre IMU e INS?
A diferença entre uma Unidade de Medição Inercial (IMU) e um Sistema de Navegação Inercial (INS) reside em sua funcionalidade e complexidade.
Uma IMU unidade de medição inercial) fornece dados brutos sobre a aceleração linear e a velocidade angular do veículo, medidos por acelerômetros e giroscópios. Ela fornece informações sobre rotação, inclinação, guinada e movimento, mas não calcula dados de posição ou navegação. A IMU projetada especificamente para transmitir dados essenciais sobre movimento e orientação para processamento externo, a fim de determinar a posição ou a velocidade.
Por outro lado, um INS sistema de navegação inercial) combina IMU com algoritmos avançados para calcular a posição, a velocidade e a orientação de um veículo ao longo do tempo. Ele incorpora algoritmos de navegação, como a filtragem de Kalman, para fusão e integração de sensores. Um INS dados de navegação em tempo real, incluindo posição, velocidade e orientação, sem depender de sistemas de posicionamento externos, como GNSS.
Esse sistema de navegação é normalmente utilizado em aplicações que exigem soluções de navegação abrangentes, particularmente em ambientes GNSS, como UAVs militares, navios e submarinos.
O INS aceita entradas de sensores auxiliares externos?
Os Sistemas de Navegação Inercial da nossa empresa aceitam entradas de sensores auxiliares externos, como sensores de dados aéreos, magnetômetros, odômetros, DVL e outros.
Essa integração torna o INS altamente versátil e confiável, especialmente em ambientes com GNSS negado.
Esses sensores externos melhoram o desempenho geral e a precisão do INS, fornecendo dados complementares.
