Hyperloop 挑战赛
UCI 团队使用 Ellipse-N 微型 INS 来测量其吊舱的位置、速度和加速度。
“我们对 Ellipse-N 给我们的结果非常满意。它是我们获得的最可靠的数据来源。” | HyperXite 团队队长 Andrew T.

来自 UCI 大学的 HyperXite 团队参加了第二次 Hyperloop 比赛,并在全美 Hyperloop 团队中排名第一,在世界空中悬浮团队中排名第二。他们使用 Ellipse-N 微型 INS 来测量其吊舱的位置、速度和加速度。
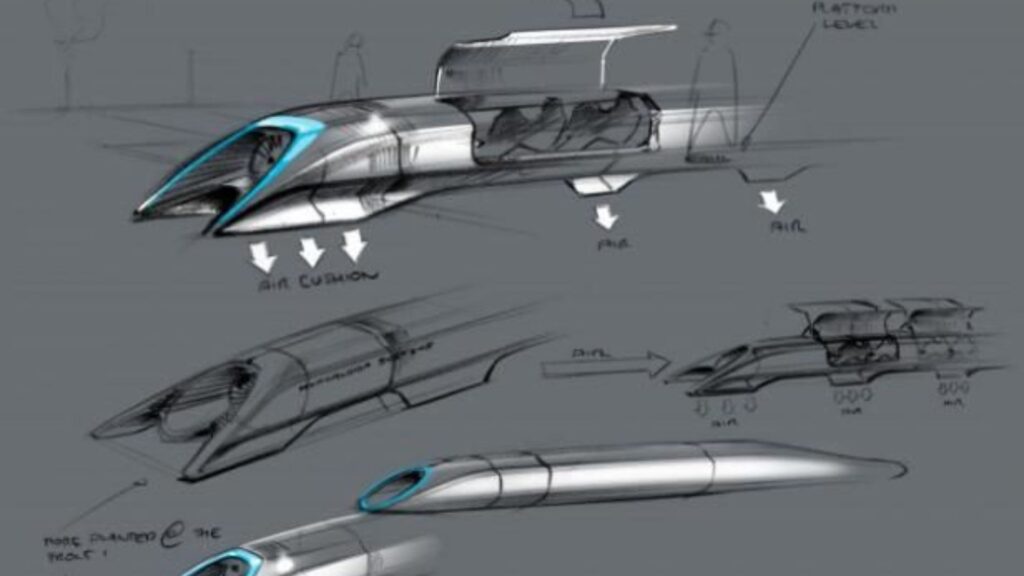
Hyperloop 概念
Hyperloop 是一个旨在提高运输效率的惊人概念。Hyperloop 由一个密封的管道组成,吊舱可以在其中无空气阻力或摩擦地高速行驶,从而高效地运送人员或物体。
2015 年,SpaceX 赞助了第一届 Hyperloop 吊舱竞赛,各个团队在竞赛中制造了一个亚比例原型,以展示 Hyperloop 概念各个方面的技术可行性。来自加州大学欧文分校 (UCI) 的 HyperXite 团队使用 SBG Systems 的 Ellipse-N 参加了第二次 Hyperloop 竞赛。
Competition II 比赛已经结束,HyperXite 团队在美国 Hyperloop 团队中排名第一,在世界气动悬浮团队中排名第二。这支成功的团队是世界上仅有的六支成功通过 Hyperloop 管道进入开放空间的团队之一。
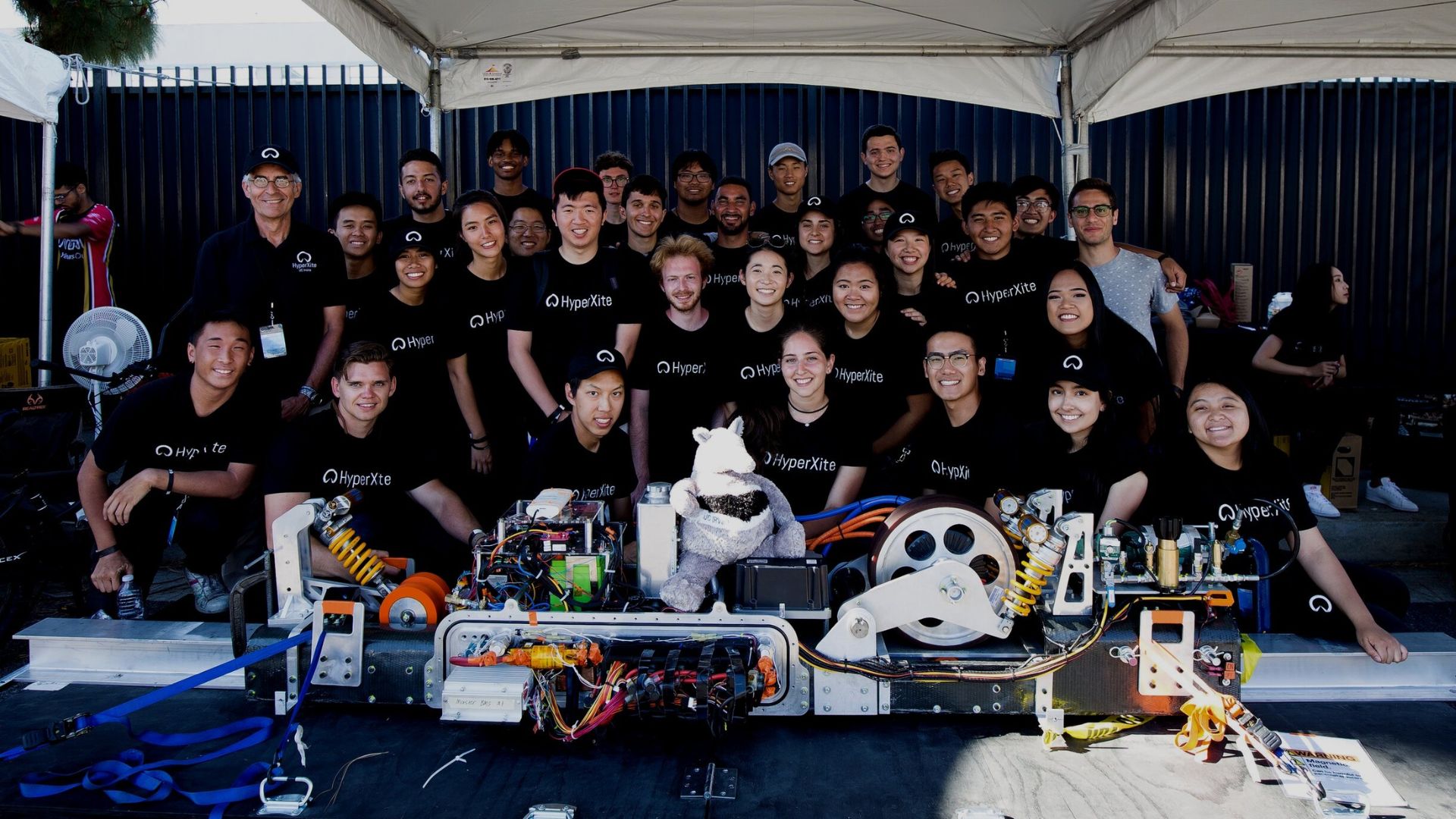
Hyperloop 比赛中的 UCI 团队 « Hyperxite»
加州大学欧文分校 (UCI) 的学生设计了一种管状车辆,使其能够在接近真空的管道中高速高效地行驶。此外,该吊舱使用轻质碳纤维和先进的系统来实现悬浮、载客和安全停止。
比赛在南加州的一英里测试赛道上进行。此外,每个吊舱都会加速以达到最高速度(实时报告),然后通过制动减速。
最后,评委将根据速度、稳定性、制动和平稳性来评估吊舱。
Pod 的位置、速度和加速度
HyperXite 团队的队长 Andrew Tec 解释说:“当吊舱位于 SpaceX 的 Hyperloop 真空管中时,我们的原型吊舱需要一种可靠的方法来测量其位置、速度和加速度”。
如果团队最初的概念是使用多个加速度计和旋转编码器进行传感器融合来估计吊舱的行为,那么 Ellipse-N 以工业级精度(0.1° 横摇/纵倾)和一个小型封装提供了所有这些功能。
惯性传感器提供了额外的有价值的功能,例如 GNSS 定位和 CAN 总线协议。

“我们需要一个在接近真空条件下表现良好的组件,一个易于与精密传感器集成的组件;Ellipse-N 满足了所有这些标准。” | Andrew T., HyperXite 团队队长
Ellipse-N 快速简易集成
该团队正在使用 National Instrument 的 Compact RIO 控制器进行开发,并且发现 SBG 的公共 LabVIEW 插件非常方便;它使测试和开发变得非常容易和快速。
“我们对 Ellipse-N 给我们的结果非常满意。它是我们获得的最可靠的数据来源。我们吊舱的状态机行为在很大程度上依赖于其估计的轨迹剖面和时间” 团队队长总结道。
SpaceX 宣布将于 2018 年举行第三次比赛。此外,HyperXite 将使用重新设计的吊舱参加比赛,以符合更新后的 Hyperloop 比赛规则。

Ellipse-N
Ellipse-N 是一款紧凑型高性能 RTK 惯性导航系统,集成了双频、四星座 GNSS 接收器。此外,它还提供横滚、纵倾、航向、升沉和厘米级 GNSS 定位。
Ellipse-N 传感器在动态环境和恶劣的 GNSS 条件下表现出色。此外,它还可以使用磁航向在较低动态应用中有效运行。

询问 Ellipse-N 的报价
您有疑问吗?
欢迎访问我们的常见问题解答 (FAQ) 专区!在这里,您可以找到关于我们展示的应用的最常见问题的答案。如果您找不到您要查找的内容,请随时直接与我们联系!
什么是 GNSS 与 GPS?
GNSS 代表全球导航卫星系统,GPS 代表 全球定位系统。这些术语经常互换使用,但它们在基于卫星的导航系统中指的是不同的概念。
GNSS 是所有卫星导航系统的统称,而 GPS 则特指美国的系统。GNSS 包含多个系统,提供更全面的全球覆盖,而 GPS 只是这些系统中的一个。
通过集成来自多个系统的数据,您可以通过 GNSS 获得更高的精度和可靠性,而仅使用 GPS 可能会受到卫星可用性和环境条件的限制。
AHRS 和 INS 之间有什么区别?
姿态和航向参考系统 (AHRS) 与惯性导航系统 (INS) 之间的主要区别在于它们的功能和提供的数据范围。
AHRS 提供方向信息,特别是车辆或设备的姿态(俯仰、横滚)和航向(偏航)。它通常使用陀螺仪、加速度计和磁力计等传感器的组合来计算和稳定方向。AHRS 输出三个轴(俯仰、横滚和偏航)中的角位置,使系统能够了解其在空间中的方向。它通常用于航空、无人机、机器人和船舶系统中,以提供准确的姿态和航向数据,这对于车辆控制和稳定至关重要。
INS 不仅提供方向数据(如 AHRS),还跟踪车辆随时间推移的位置、速度和加速度。它使用惯性传感器来估计 3D 空间中的运动,而无需依赖 GNSS 等外部参考。它结合了 AHRS 中的传感器(陀螺仪、加速度计),但也可能包括更高级的位置和速度跟踪算法,通常与 GNSS 等外部数据集成以提高精度。
总而言之,AHRS 侧重于方向(姿态和航向),而 INS 提供全套导航数据,包括位置、速度和方向。
IMU 和 INS 之间有什么区别?
惯性测量单元(IMU)与惯性导航系统(INS)的区别在于其功能和复杂程度。
IMU 惯性测量单元)通过加速度计和陀螺仪测量车辆的线性加速度和角速度,并提供原始数据。它提供关于横滚、俯仰、偏航及运动状态的信息,但不会计算位置或导航数据。IMU 传输有关运动和姿态的基本数据,供外部处理以确定位置或速度。
另一方面,INS 惯性导航系统)结合了 IMU 数据与先进算法相结合,计算车辆随时间变化的位置、速度和姿态。它集成了卡尔曼滤波等导航算法,用于传感器融合与数据整合。INS 包括位置、速度和姿态在内的实时导航数据,且无需依赖GNSS外部定位系统。
该导航系统通常应用于需要全面导航解决方案的场景,GNSS的环境中,例如军用无人机、船舶和潜艇。
INS 是否接受来自外部辅助传感器的输入?
我们公司的惯性导航系统接受来自外部辅助传感器(如空速传感器、磁力计、里程计、DVL等)的输入。
这种集成使 INS 具有高度的通用性和可靠性,尤其是在 GNSS 受限的环境中。
这些外部传感器通过提供补充数据来增强 INS 的整体性能和精度。
