Hyperloop Challenge
El equipo de la UCI utilizó el INS miniatura Ellipse-N para medir la posición, la velocidad y la aceleración de su pod.
“Estábamos más que satisfechos con los resultados que nos dio el Ellipse-N. Fue la fuente de datos más fiable que obtuvimos.” | Andrew T., Capitán del equipo HyperXite

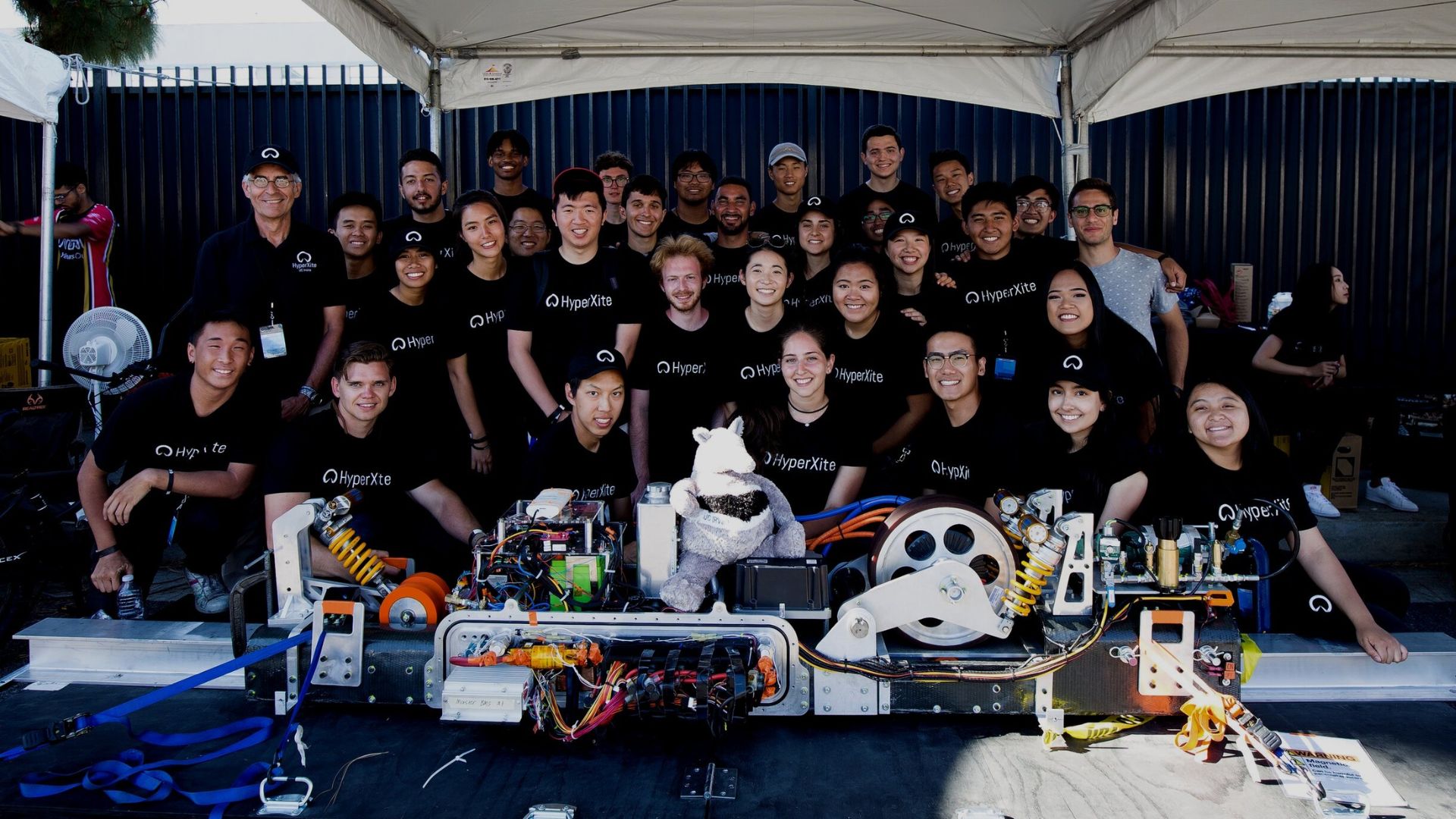
HyperXite, el equipo de la universidad UCI, participó en la segunda competición Hyperloop y se clasificó como el número 1 del equipo Hyperloop de toda América y el número 2 del mundo en levitación basada en aire. Utilizaron el INS miniatura Ellipse-N para medir la posición, la velocidad y la aceleración de su cápsula.
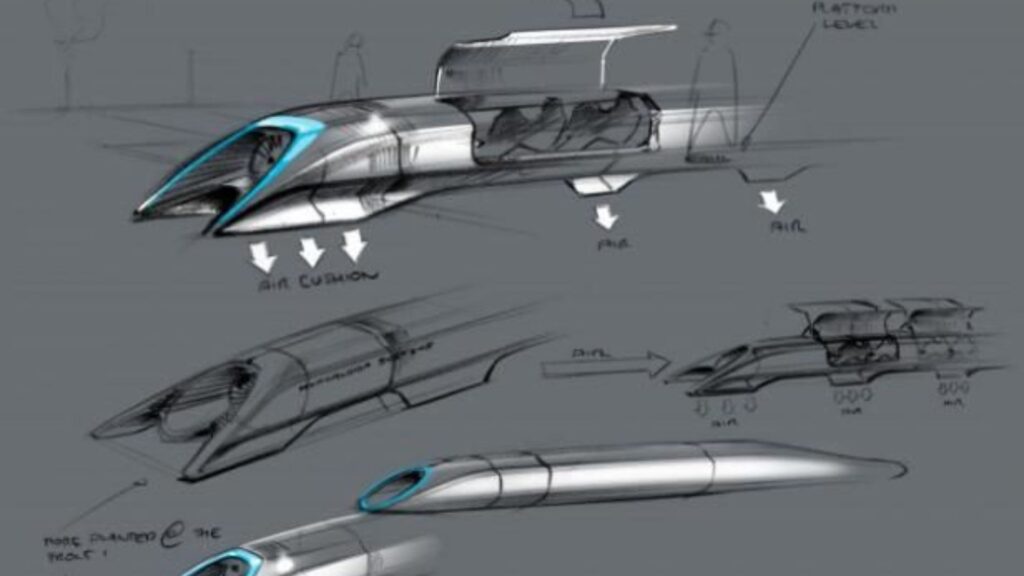
Hyperloop Concept
El Hyperloop es un concepto asombroso que pretende aumentar la eficiencia del transporte. El Hyperloop está formado por un tubo sellado a través del cual una cápsula puede viajar libre de resistencia al aire o fricción transportando personas u objetos a alta velocidad, siendo a la vez muy eficiente.
En 2015, SpaceX patrocinó la primera Hyperloop Pod Competition, en la que los equipos construyeron un prototipo a subescala para demostrar la viabilidad técnica de varios aspectos del concepto Hyperloop. HyperXite, el equipo de la Universidad de California, Irvine (UCI) participó en la segunda competición Hyperloop con el Ellipse-N de SBG Systems.
La Competición II ha concluido y HyperXite ocupa el puesto número 1 entre los equipos Hyperloop de Estados Unidos, y el número 2 a nivel mundial en levitación basada en aire. El exitoso equipo es uno de los seis únicos equipos en todo el mundo que lograron atravesar completamente el tubo Hyperloop hasta el aire libre.
El equipo de la UCI « Hyperxite», en la competición Hyperloop
Los estudiantes de la UCI diseñaron un vehículo tubular para viajar eficientemente a alta velocidad a través de un tubo casi vacío. Además, la cápsula utiliza fibra de carbono ligera y sistemas avanzados para levitar, transportar pasajeros y detenerse de forma segura.
La competición tiene lugar en una pista de pruebas de una milla en el sur de California. Además, cada cápsula acelera para alcanzar la velocidad máxima, que se informa en tiempo real, y luego desacelera frenando.
Finalmente, los jueces evalúan las cápsulas por su velocidad, estabilidad, frenado y suavidad.
Posición, velocidad y aceleración del Pod
“Nuestro prototipo de cápsula necesitaba una forma fiable de medir su posición, velocidad y aceleración cuando la cápsula está en el tubo de vacío Hyperloop de SpaceX”, explica Andrew Tec, Capitán del equipo HyperXite.
Si el equipo inicialmente tenía el concepto de implementar la fusión de sensores con múltiples acelerómetros y codificadores rotatorios para estimar el comportamiento de la cápsula, el Ellipse-N proporcionó todas estas características con una precisión de grado industrial (0,1° de balanceo/cabeceo) y en un paquete pequeño.
El sensor inercial ofrecía características valiosas adicionales, como el posicionamiento GNSS y el protocolo de bus CAN.

“Necesitábamos un componente que funcionara bien en condiciones de casi vacío, uno que fuera fácil de integrar con sensores precisos; el Ellipse-N cumplía todos los criterios.” | Andrew T., Capitán del equipo HyperXite
La integración rápida y sencilla del Ellipse-N
El equipo estaba desarrollando utilizando un controlador Compact RIO de National Instrument, y encontró el plugin público de LabVIEW de SBG muy conveniente; hizo que las pruebas y el desarrollo fueran tremendamente fáciles y rápidos.
“Estábamos más que satisfechos con los resultados que nos dio el Ellipse-N. Fue la fuente de datos más fiable que obtuvimos. El comportamiento de la máquina de estados de nuestra cápsula dependía en gran medida de su perfil de trayectoria estimado y del tiempo” concluye el capitán del equipo.
SpaceX anunció la tercera competición que se celebrará en 2018. Además, HyperXite competirá con una cápsula recientemente rediseñada para cumplir con las normas actualizadas de la Hyperloop Competition.

Ellipse-N
Ellipse-N es un sistema de navegación inercial RTK compacto y de alto rendimiento con un receptor GNSS integrado de doble banda y cuatro constelaciones. Además, ofrece balanceo, cabeceo, rumbo, compensación de oleaje (heave) y posicionamiento GNSS a nivel centimétrico.
El sensor Ellipse-N destaca en entornos dinámicos y en condiciones GNSS adversas. Además, funciona eficazmente en aplicaciones de menor dinámica utilizando el rumbo magnético.

Solicite un presupuesto para el Ellipse-N
¿Tiene alguna pregunta?
¡Bienvenido a nuestra sección de preguntas frecuentes! Aquí encontrará respuestas a las preguntas más comunes sobre las aplicaciones que mostramos. Si no encuentra lo que busca, ¡no dude en ponerse en contacto con nosotros directamente!
¿Qué es GNSS vs GPS?
GNSS significa Sistema Global de Navegación por Satélite y GPS para Sistema de Posicionamiento Global. Estos términos se utilizan a menudo indistintamente, pero se refieren a conceptos diferentes dentro de los sistemas de navegación por satélite.
GNSS es un término colectivo que engloba a todos los sistemas de navegación por satélite, mientras que GPS se refiere específicamente al sistema estadounidense. El GNSS incluye múltiples sistemas que proporcionan una cobertura global más completa, siendo GPS solo uno de ellos.
Se obtiene una mayor precisión y fiabilidad con GNSS, al integrar datos de múltiples sistemas, mientras que GPS por sí solo podría tener limitaciones dependiendo de la disponibilidad de satélites y las condiciones ambientales.
¿Cuál es la diferencia entre AHRS e INS?
La principal diferencia entre un sistema de referencia de actitud y rumbo (AHRS) y un sistema de navegación inercial (INS) radica en su funcionalidad y en el alcance de los datos que proporcionan.
El AHRS proporciona información de orientación, concretamente, la actitud (cabeceo, balanceo) y el rumbo (guiñada) de un vehículo o dispositivo. Normalmente, utiliza una combinación de sensores, como giroscopios, acelerómetros y magnetómetros, para calcular y estabilizar la orientación. El AHRS emite la posición angular en tres ejes (cabeceo, balanceo y guiñada), lo que permite a un sistema comprender su orientación en el espacio. A menudo se utiliza en la aviación, los UAV, la robótica y los sistemas marinos para proporcionar datos precisos de actitud y rumbo, que son fundamentales para el control y la estabilización del vehículo.
Un INS no solo proporciona datos de orientación (como un AHRS), sino que también rastrea la posición, la velocidad y la aceleración de un vehículo a lo largo del tiempo. Utiliza sensores inerciales para estimar el movimiento en el espacio 3D sin depender de referencias externas como el GNSS. Combina los sensores que se encuentran en el AHRS (giroscopios, acelerómetros), pero también puede incluir algoritmos más avanzados para el seguimiento de la posición y la velocidad, a menudo integrándose con datos externos como el GNSS para mejorar la precisión.
En resumen, el AHRS se centra en la orientación (actitud y rumbo), mientras que el INS proporciona un conjunto completo de datos de navegación, incluyendo posición, velocidad y orientación.
¿Cuál es la diferencia entre IMU e INS?
La diferencia entre una unidad de medición inercial (IMU) y un sistema de navegación inercial (INS) radica en su funcionalidad y complejidad.
Una IMU unidad de medición inercial) proporciona datos brutos sobre la aceleración lineal y la velocidad angular del vehículo, medidos por acelerómetros y giroscopios. Proporciona información sobre el balanceo, el cabeceo, el guiñada y el movimiento, pero no calcula datos de posición ni de navegación. La IMU diseñada específicamente para transmitir datos esenciales sobre el movimiento y la orientación para su procesamiento externo con el fin de determinar la posición o la velocidad.
Por otro lado, un INS sistema de navegación inercial) combina IMU con algoritmos avanzados para calcular la posición, la velocidad y la orientación de un vehículo a lo largo del tiempo. Incorpora algoritmos de navegación como el filtrado de Kalman para la fusión e integración de sensores. Un INS datos de navegación en tiempo real, incluyendo posición, velocidad y orientación, sin depender de sistemas de posicionamiento externos como GNSS.
Este sistema de navegación se utiliza normalmente en aplicaciones que requieren soluciones de navegación completas, especialmente en entornos GNSS, como los UAV militares, los buques y los submarinos.
¿Acepta el INS entradas de sensores de ayuda externos?
Los Sistemas de Navegación Inercial de nuestra empresa aceptan entradas de sensores de ayuda externos, como sensores de datos aéreos, magnetómetros, odómetros, DVL y otros.
Esta integración hace que el INS sea muy versátil y fiable, especialmente en entornos sin cobertura GNSS.
Estos sensores externos mejoran el rendimiento general y la precisión del INS al proporcionar datos complementarios.
