Hyperloop Challenge
Das UCI-Team verwendete das Miniatur-INS Ellipse-N, um die Position, Geschwindigkeit und Beschleunigung ihrer Kapsel zu messen.
“Wir waren mit den Ergebnissen, die uns das Ellipse-N lieferte, mehr als zufrieden. Es war die zuverlässigste Datenquelle, die wir erhalten haben.” | Andrew T., Kapitän des HyperXite-Teams

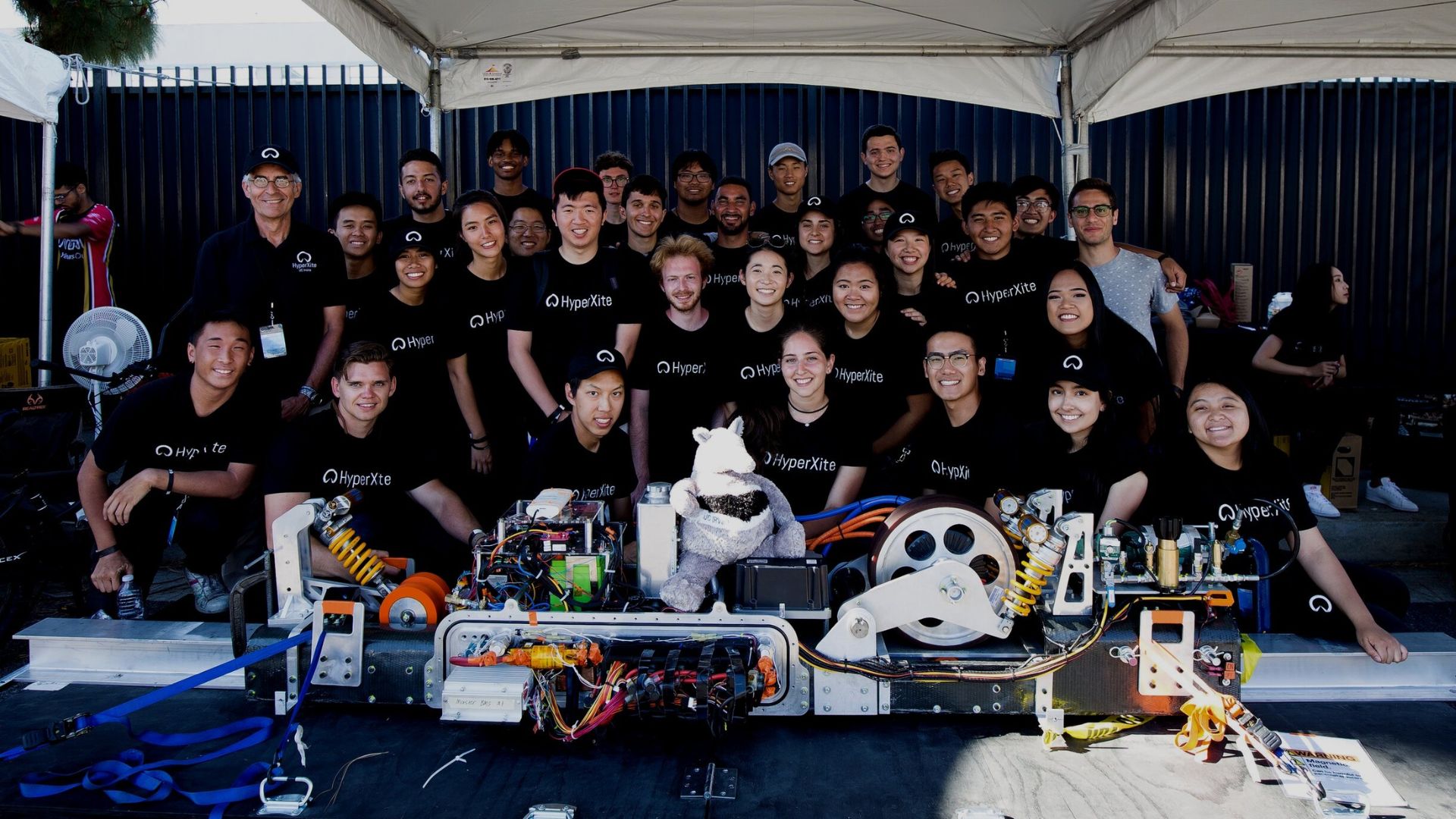
HyperXite, das Team der UCI-Universität, nahm am zweiten Hyperloop-Wettbewerb teil und belegte Platz 1 aller amerikanischen Hyperloop-Teams und Platz 2 weltweit für Air-Based Levitation. Sie verwendeten das Miniatur-INS Ellipse-N, um die Position, Geschwindigkeit und Beschleunigung ihrer Kapsel zu messen.
Hyperloop-Konzept
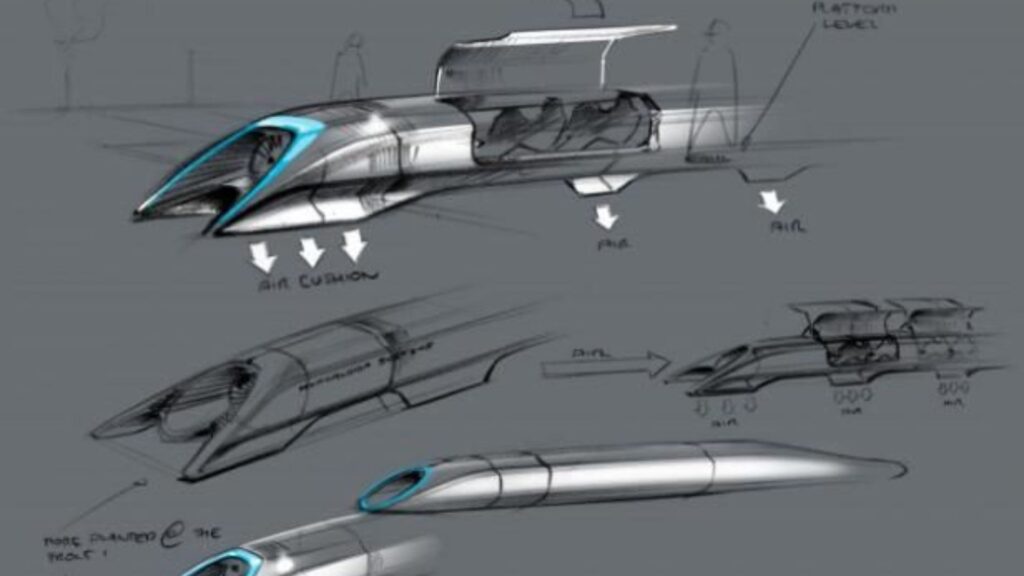
Der Hyperloop ist ein faszinierendes Konzept, das darauf abzielt, die Transporteffizienz zu steigern. Der Hyperloop besteht aus einer abgedichteten Röhre, durch die sich eine Kapsel ohne Luftwiderstand oder Reibung bewegen kann, um Personen oder Objekte mit hoher Geschwindigkeit und sehr effizient zu befördern.
Im Jahr 2015 sponserte SpaceX den ersten Hyperloop Pod Competition, bei dem Teams einen Prototyp im Submaßstab bauten, um die technische Machbarkeit verschiedener Aspekte des Hyperloop-Konzepts zu demonstrieren. HyperXite, das Team der University of California, Irvine (UCI), nahm mit der Ellipse-N von SBG Systems am zweiten Hyperloop-Wettbewerb teil.
Der Wettbewerb II ist nun beendet und HyperXite ist die Nummer 1 unter allen amerikanischen Hyperloop-Teams und die Nummer 2 der Welt für Air-Based Levitation. Das erfolgreiche Team ist eines der einzigen sechs Teams weltweit, das es durch die gesamte Hyperloop-Röhre bis ins Freie geschafft hat.
Das UCI-Team « Hyperxite» beim Hyperloop-Wettbewerb
UCI-Studenten entwarfen ein röhrenförmiges Fahrzeug, um effizient mit hoher Geschwindigkeit durch eine nahezu luftleere Röhre zu fahren. Darüber hinaus verwendet der Pod leichte Kohlefaser und fortschrittliche Systeme, um zu schweben, Passagiere zu befördern und sicher anzuhalten.
Der Wettbewerb findet auf einer 1,6 Kilometer langen Teststrecke in Südkalifornien statt. Zusätzlich beschleunigt jeder Pod, um die Höchstgeschwindigkeit zu erreichen, die in Echtzeit gemeldet wird, und verzögert dann durch Bremsen.
Schließlich bewerten die Juroren die Pods nach Geschwindigkeit, Stabilität, Bremsen und Laufruhe.
Position, Geschwindigkeit und Beschleunigung der Kapsel
“Unser Prototyp benötigte eine zuverlässige Möglichkeit, seine Position, Geschwindigkeit und Beschleunigung zu messen, wenn sich die Kapsel in der Hyperloop-Vakuumröhre von SpaceX befindet”, erklärt Andrew Tec, Captain des HyperXite-Teams.
Wenn das Team anfänglich das Konzept hatte, Sensorfusion mit mehreren Beschleunigungsmessern und Drehgebern zu implementieren, um das Verhalten der Kapsel abzuschätzen, bot die Ellipse-N all diese Funktionen mit industrietauglicher Genauigkeit (0,1° Roll/Pitch) und in einem kleinen Paket.
Der Trägheitssensor bot zusätzliche wertvolle Funktionen wie GNSS-Positionierung und CAN-Bus-Protokoll.

“Wir brauchten eine Komponente, die unter nahezu Vakuumbedingungen gut funktioniert und einfach in präzise Sensoren zu integrieren ist; die Ellipse-N erfüllte alle Kriterien.” | Andrew T., Captain des HyperXite-Teams
Die schnelle und einfache Integration der Ellipse-N
Das Team entwickelte mit einem Compact RIO-Controller von National Instruments und fand das öffentliche LabVIEW-Plugin von SBG sehr praktisch; es machte das Testen und Entwickeln enorm einfach und schnell.
“Wir waren mehr als zufrieden mit den Ergebnissen, die uns der Ellipse-N geliefert hat. Er war die zuverlässigste Datenquelle, die wir erhalten haben. Das State-Machine-Verhalten unseres Pods hing stark von seinem geschätzten Trajektorienprofil und der Zeit ab”, schließt der Team Captain.
SpaceX kündigte den dritten Wettbewerb an, der 2018 stattfinden soll. Darüber hinaus wird HyperXite mit einem neu gestalteten Pod antreten, um die aktualisierten Regeln des Hyperloop-Wettbewerbs zu erfüllen.

Ellipse-N
Ellipse-N ist ein kompaktes, leistungsstarkes RTK Inertial Navigation System mit einem integrierten Dualband-Quad-Konstellations-GNSS-Empfänger. Darüber hinaus liefert es Roll-, Nick-, Kurs-, Heave- und GNSS-Positionierung auf Zentimeterebene.
Der Ellipse-N Sensor zeichnet sich in dynamischen Umgebungen und unter schwierigen GNSS-Bedingungen aus. Zusätzlich arbeitet er effektiv in Anwendungen mit geringerer Dynamik unter Verwendung des magnetischen Kurses.

Fordern Sie ein Angebot für Ellipse-N an
Haben Sie Fragen?
Willkommen in unserem FAQ-Bereich! Hier finden Sie Antworten auf die häufigsten Fragen zu den Anwendungen, die wir vorstellen. Wenn Sie nicht finden, wonach Sie suchen, können Sie sich gerne direkt an uns wenden!
Was ist GNSS vs. GPS?
GNSS steht für Global Navigation Satellite System und GPS für Global Positioning System. Diese Begriffe werden oft synonym verwendet, aber sie beziehen sich auf unterschiedliche Konzepte innerhalb satellitengestützter Navigationssysteme.
GNSS ist ein Sammelbegriff für alle Satellitennavigationssysteme, während GPS sich speziell auf das US-amerikanische System bezieht. GNSS umfasst mehrere Systeme, die eine umfassendere globale Abdeckung bieten, wobei GPS nur eines dieser Systeme ist.
Durch die Integration von Daten aus mehreren Systemen erhalten Sie mit GNSS eine verbesserte Genauigkeit und Zuverlässigkeit, während GPS allein je nach Satellitenverfügbarkeit und Umgebungsbedingungen Einschränkungen aufweisen kann.
Was ist der Unterschied zwischen AHRS und INS?
Der Hauptunterschied zwischen einem Attitude and Heading Reference System (AHRS) und einem Inertial Navigation System (INS) liegt in ihrer Funktionalität und dem Umfang der von ihnen bereitgestellten Daten.
AHRS liefert Orientierungsinformationen, insbesondere die Lage (Nick-, Rollwinkel) und den Kurs (Gierwinkel) eines Fahrzeugs oder Geräts. Es verwendet typischerweise eine Kombination von Sensoren, darunter Gyroskope, Beschleunigungsmesser und Magnetometer, um die Orientierung zu berechnen und zu stabilisieren. Das AHRS gibt die Winkelposition in drei Achsen (Nick-, Roll- und Gierwinkel) aus, wodurch ein System seine Orientierung im Raum verstehen kann. Es wird häufig in der Luftfahrt, bei UAVs, in der Robotik und in Marinesystemen eingesetzt, um genaue Lage- und Kursdaten zu liefern, die für die Fahrzeugsteuerung und -stabilisierung entscheidend sind.
Ein INS liefert nicht nur Orientierungsdaten (wie ein AHRS), sondern verfolgt auch die Position, Geschwindigkeit und Beschleunigung eines Fahrzeugs im Zeitverlauf. Es verwendet Trägheitssensoren, um die Bewegung im 3D-Raum zu schätzen, ohne auf externe Referenzen wie GNSS angewiesen zu sein. Es kombiniert die in AHRS (Gyroskope, Beschleunigungsmesser) enthaltenen Sensoren, kann aber auch fortschrittlichere Algorithmen für die Positions- und Geschwindigkeitsverfolgung enthalten und sich oft mit externen Daten wie GNSS integrieren, um die Genauigkeit zu verbessern.
Zusammenfassend lässt sich sagen, dass sich AHRS auf die Orientierung (Lage und Kurs) konzentriert, während INS eine vollständige Suite von Navigationsdaten einschließlich Position, Geschwindigkeit und Orientierung bereitstellt.
Was ist der Unterschied zwischen IMU und INS?
Der Unterschied zwischen einer Trägheitsmesseinheit (IMU) und einem Trägheitsnavigationssystem (INS) liegt in ihrer Funktionalität und Komplexität.
Eine IMU Inertial Measurement Unit) liefert Rohdaten zur linearen Beschleunigung und Winkelgeschwindigkeit des Fahrzeugs, die von Beschleunigungssensoren und Gyroskopen gemessen werden. Sie liefert Informationen zu Roll-, Nick- und Gierbewegung sowie zur Gesamtbewegung, berechnet jedoch keine Positions- oder Navigationsdaten. Die IMU speziell darauf ausgelegt, wesentliche Daten zu Bewegung und Ausrichtung zur externen Verarbeitung weiterzuleiten, um Position oder Geschwindigkeit zu bestimmen.
Ein INS Inertial Navigation System) hingegen kombiniert IMU -Daten mit fortschrittlichen Algorithmen, um die Position, Geschwindigkeit und Ausrichtung eines Fahrzeugs im Zeitverlauf zu berechnen. Es nutzt Navigationsalgorithmen wie Kalman-Filterung für die Sensorfusion und -integration. Ein INS Echtzeit-Navigationsdaten, einschließlich Position, Geschwindigkeit und Ausrichtung, ohne auf externe Ortungssysteme wie GNSS angewiesen zu sein.
Dieses Navigationssystem wird typischerweise in Anwendungen eingesetzt, die umfassende Navigationslösungen erfordern, insbesondere in Umgebungen GNSS, wie z. B. bei militärischen UAVs, Schiffen und U-Booten.
Akzeptiert das INS Eingaben von externen Hilfssensoren?
Inertiale Navigationssysteme unseres Unternehmens akzeptieren Eingaben von externen Hilfssensoren wie Luftdatensensoren, Magnetometern, Odometern, DVL und anderen.
Diese Integration macht das INS äußerst vielseitig und zuverlässig, insbesondere in GNSS-abgelehnten Umgebungen.
Diese externen Sensoren verbessern die Gesamtleistung und Genauigkeit des INS, indem sie ergänzende Daten liefern.
