Hyperloop Challenge
The UCI team used the Ellipse-N miniature INS to measure their pod position, velocity, and acceleration.
“We were more than satisfied with the results the Ellipse-N gave us. It was the most reliable source of data we obtained.” | Andrew T., Captain of the HyperXite team

HyperXite, the team from the UCI university, participated to the second Hyperloop competition and ranked #1 of All-American Hyperloop team, and #2 in the world for Air-Based Levitation. They used the Ellipse-N miniature INS to measure their pod position, velocity, and acceleration.
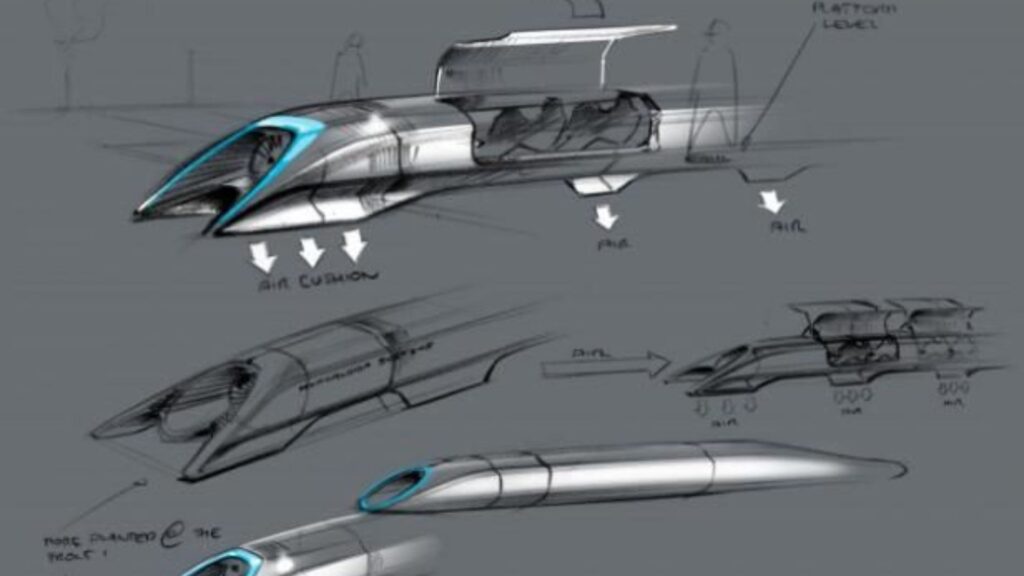
Hyperloop Concept
The Hyperloop is an amazing concept that aim to increase transport efficiency. The Hyperloop is made of a sealed tube through which a pod can travel free of air resistance or friction conveying people or objects at high speed while being very efficient.
In 2015, SpaceX sponsored the first Hyperloop Pod Competition where teams built a sub-scale prototype to demonstrate technical feasibility of various aspects of the Hyperloop concept. HyperXite, the team from the University of California, Irvine (UCI) took part in the second Hyperloop competition with the Ellipse-N from SBG Systems.
Competition II is now over and HyperXite is ranked #1 of All-American Hyperloop team, and #2 in the world for Air-Based Levitation. The successful team is one of the only six teams around the world to make it all the way through the Hyperloop tube to the open air.
The UCI team « Hyperxite», at the Hyperloop competition
UCI students designed a tubular vehicle to travel efficiently at high speed through a near-vacuum tube. Moreover, the pod uses lightweight carbon fiber and advanced systems to levitate, carry passengers, and stop safely.
The competition takes place on a one-mile test track in Southern California. In addition, each pod accelerates to reach top speed, reported in real-time, and then decelerates by braking.
Finally, judges evaluate pods for speed, stability, braking, and smoothness.
Pod Position, Velocity, and Acceleration
“Our prototype pod needed a reliable way to measure its position, velocity, and acceleration when the pod is in the SpaceX’s Hyperloop vacuum tube” explains Andrew Tec, Captain of the HyperXite team.
If the team initially had the concept of implementing sensor fusion with multiple accelerometers and rotary encoders to estimate the pod’s behavior, the Ellipse-N provided all these features at industrial-grade accuracy (0.1° roll/pitch) and in a small package.
The inertial sensor offered additional valuable features such as GNSS positioning and CAN bus protocol.

“We needed a component that performs well under near vacuum conditions, one that was easy to integrate with precise sensors; the Ellipse-N satisfied all of the criteria.” | Andrew T., Captain of the HyperXite team
The Ellipse-N fast and easy integration
The team was developing using a National Instrument’s Compact RIO controller, and found the SBG public LabVIEW plugin very convenient; it made testing and development tremendously easy and fast.
“We were more than satisfied with the results the Ellipse-N gave us. It was the most reliable source of data we obtained. Our pod’s state machine behavior heavily relied on its estimated trajectory profile and time” concludes the team Captain.
SpaceX announced the third competition to be held in 2018. Moreover, HyperXite will compete with a newly redesigned pod to meet updated Hyperloop Competition rules.

Ellipse-N
Ellipse-N is a compact, high-performance RTK Inertial Navigation System with an integrated Dual-band, Quad-constellation GNSS receiver. Moreover, it delivers roll, pitch, heading, heave, and centimeter-level GNSS positioning.
The Ellipse-N sensor excels in dynamic environments and harsh GNSS conditions. In addition, it operates effectively in lower dynamic applications using magnetic heading.

Ask a quotation for Ellipse-N
Do you have questions?
Welcome to our FAQ section! Here, you’ll find answers to the most common questions about the applications we showcase. If you don’t find what you’re looking for, feel free to contact us directly!
What is GNSS vs GPS?
GNSS stands for Global Navigation Satellite System and GPS for Global Positioning System. These terms are often used interchangeably, but they refer to different concepts within satellite-based navigation systems.
GNSS is a collective term for all satellite navigation systems, while GPS refers specifically to the U.S. system. It includes multiple systems that provide more comprehensive global coverage, while GPS is just one of those systems.
You get improved accuracy and reliability with GNSS, by integrating data from multiple systems, whereas GPS alone might have limitations depending on satellite availability and environmental conditions.
What is the difference between AHRS and INS?
The main difference between an Attitude and Heading Reference System (AHRS) and an Inertial Navigation System (INS) lies in their functionality and the scope of the data they provide.
AHRS provides orientation information—specifically, the attitude (pitch, roll) and heading (yaw) of a vehicle or device. It typically uses a combination of sensors, including gyroscopes, accelerometers, and magnetometers, to calculate and stabilize the orientation. The AHRS outputs the angular position in three axes (pitch, roll, and yaw), allowing a system to understand its orientation in space. It is often used in aviation, UAVs, robotics, and marine systems to provide accurate attitude and heading data, which is critical for vehicle control and stabilization.
A INS not only provides orientation data (like an AHRS) but also tracks a vehicle’s position, velocity, and acceleration over time. It uses inertial sensors to estimate movement in 3D space without relying on external references like GNSS. It combines the sensors found in AHRS (gyroscopes, accelerometers) but may also include more advanced algorithms for position and velocity tracking, often integrating with external data like GNSS for enhanced accuracy.
In summary, AHRS focuses on orientation (attitude and heading), while INS provides a full suite of navigational data, including position, velocity, and orientation.
What is the difference between IMU and INS?
The difference between an Inertial Measurement Unit (IMU) and an Inertial Navigation System (INS) lies in their functionality and complexity.
An IMU (inertial measuring unit) provides raw data on the vehicle’s linear acceleration and angular velocity, measured by accelerometers and gyroscopes. It supplies information on roll, pitch, yaw, and motion, but does not compute position or navigation data. The IMU is specifically designed to relay essential data about movement and orientation for external processing to determine position or velocity.
On the other hand, an INS (inertial navigation system) combines IMU data with advanced algorithms to calculate a vehicle’s position, velocity, and orientation over time. It incorporates navigation algorithms like Kalman filtering for sensor fusion and integration. An INS supplies real-time navigation data, including position, velocity, and orientation, without relying on external positioning systems like GNSS.
This navigation system is typically utilized in applications that require comprehensive navigation solutions, particularly in GNSS-denied environments, such as military UAVs, ships, and submarines.
Does INS accept inputs from external aiding sensors?
Inertial Navigation Systems from our company accept inputs from external aiding sensors, such as air data sensors, magnetometers, Odometers, DVL and other.
This integration makes the INS highly versatile and reliable, especially in GNSS-denied environments.
These external sensors enhance the overall performance and accuracy of the INS by providing complementary data.
