Hyperloop Challenge
UCIチームは、ポッドの位置、速度、加速度を測定するために、小型INSのEllipse-Nを使用しました。
“Ellipse-Nから得られた結果には非常に満足しています。これは、私たちが得たデータの中で最も信頼できるものでした。” | HyperXiteチームのキャプテン、Andrew T.

UCI大学のチームであるHyperXiteは、第2回ハイパーループ競技会に参加し、全米ハイパーループチームで1位、空中浮揚で世界2位を獲得しました。彼らは、ポッドの位置、速度、加速度を測定するために、Ellipse-N小型INSを使用しました。
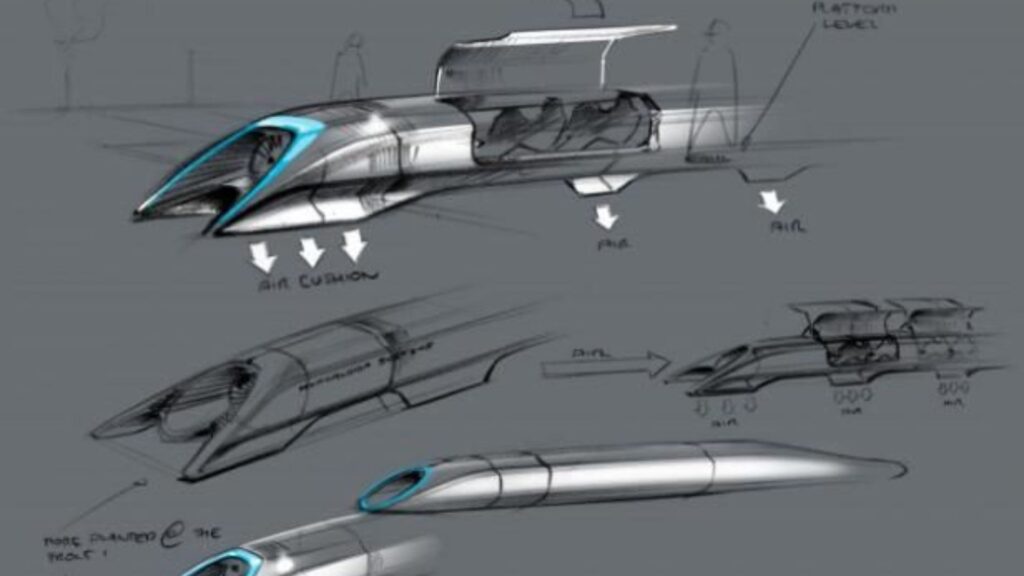
Hyperloop Concept
ハイパーループは、輸送効率の向上を目的とした素晴らしいコンセプトです。ハイパーループは、気圧や摩擦の影響を受けずにポッドが走行できる密閉チューブで構成されており、人や物を高速かつ効率的に輸送できます。
2015年、SpaceX社は最初のHyperloop Pod Competitionを開催し、各チームが縮小スケールのプロトタイプを製作し、ハイパーループ構想のさまざまな側面に関する技術的な実現可能性を実証しました。カリフォルニア大学アーバイン校(UCI)のチームであるHyperXiteは、SBG SystemsのEllipse-Nを使用して、第2回Hyperloop competitionに参加しました。
Competition IIは終了し、HyperXiteはAll-American Hyperloopチームで1位、空中浮揚で世界2位にランクインしました。この成功したチームは、Hyperloopチューブを通過して屋外に出ることができた、世界でわずか6つのチームのうちの1つです。
ハイパーループ競技会でのUCIチーム « Hyperxite»
UCIの学生は、ほぼ真空のチューブ内を高速で効率的に移動するように設計された管状車両を設計しました。さらに、ポッドは軽量の炭素繊維と高度なシステムを使用して、浮揚し、乗客を運び、安全に停止します。
競技は、南カリフォルニアの1マイルのテストトラックで行われます。さらに、各ポッドは加速して最高速度に達し、リアルタイムで報告され、その後、ブレーキをかけて減速します。
最後に、審査員はポッドの速度、安定性、ブレーキ、および滑らかさを評価します。
Podの位置、速度、加速度
HyperXiteチームのキャプテンであるAndrew Tec氏は、「私たちのプロトタイプポッドは、SpaceX社のハイパーループ真空チューブ内での位置、速度、加速度を測定するための信頼性の高い方法を必要としていました」と説明します。
当初、チームは複数の加速度計とロータリーエンコーダーを使用してセンサーフュージョンを実装し、ポッドの挙動を推定することを考えていましたが、Ellipse-Nは、産業用グレードの精度(0.1°ロール/ピッチ)で、これらの機能をすべて小型パッケージで提供しました。
この慣性センサーは、GNSS測位やCANバスプロトコルなどの貴重な機能も提供しました。

「真空に近い状態でも優れた性能を発揮し、高精度センサーとの統合が容易なコンポーネントが必要でした。Ellipse-Nは、すべての基準を満たしていました。」 | Andrew T.、HyperXiteチームのキャプテン
Ellipse-Nの迅速かつ容易な統合
チームはNational InstrumentのCompact RIOコントローラーを使用して開発しており、SBGの公開LabVIEWプラグインが非常に便利であることがわかりました。これにより、テストと開発が非常に簡単かつ迅速になりました。
「Ellipse-Nが提供してくれた結果に非常に満足しています。これは、私たちが得た最も信頼できるデータソースでした。私たちのポッドの状態マシンの動作は、推定された軌道プロファイルと時間に大きく依存していました」とチームキャプテンは結論付けています。
SpaceXは、2018年に開催される3回目の競技を発表しました。さらに、HyperXiteは、更新されたHyperloop Competitionルールを満たすために、新しく再設計されたポッドで競います。

Ellipse-N
Ellipse-Nは、デュアルバンド、クアッドコンステレーションGNSS受信機を統合した、コンパクトで高性能なRTK INS(慣性航法システム)です。さらに、ロール、ピッチ、ヘディング、ヒーブ、およびセンチメートルレベルのGNSS測位を提供します。
Ellipse-Nセンサーは、ダイナミックな環境や過酷なGNSS条件下で優れた性能を発揮します。また、磁気ヘディングを使用して、より低いダイナミックアプリケーションでも効果的に動作します。

Ellipse-Nの見積もりを依頼する
ご質問はありますか?
FAQセクションへようこそ!ここでは、ご紹介するアプリケーションに関する最も一般的な質問への回答をご覧いただけます。お探しの情報が見つからない場合は、お気軽にお問い合わせください。
GNSS と GPS の違いとは?
GNSSはGlobal Navigation Satellite Systemの略であり、GPSはGlobal Positioning Systemの略です。これらの用語はしばしば混同して使用されますが、衛星測位システム内では異なる概念を指します。
GNSSは全ての衛星測位システムの総称であり、GPSは特に米国のシステムを指します。GNSSはより包括的なグローバルカバレッジを提供する複数のシステムを含みますが、GPSはそのシステムの一つに過ぎません。
GNSSを使用すると、複数のシステムからのデータを統合することで、精度と信頼性が向上します。GPS単独では、衛星の利用可能性や環境条件によっては制限がある場合があります。
AHRSとINSの違いは何ですか?
Attitude and Heading Reference System(AHRS)とInertial Navigation System(INS)の主な違いは、その機能と提供するデータの範囲にあります。
AHRS は、車両またはデバイスの姿勢(ピッチ、ロール)および方位(ヨー)に関する情報を提供します。通常、ジャイロスコープ、加速度計、磁力計などのセンサーの組み合わせを使用して、姿勢を計算および安定化します。AHRS は、3 軸(ピッチ、ロール、ヨー)の角度位置を出力し、システムが空間内での姿勢を理解できるようにします。航空、UAV、ロボット工学、および海洋システムで、正確な姿勢および方位データを提供するために使用されることが多く、これは車両の制御および安定化に不可欠です。
INSは、姿勢データ(AHRSなど)を提供するだけでなく、車両の位置、速度、および加速度を時間とともに追跡します。慣性センサーを使用して、GNSSのような外部参照に依存せずに、3D空間での動きを推定します。AHRS(ジャイロスコープ、加速度計)にあるセンサーを組み合わせますが、位置と速度の追跡のためのより高度なアルゴリズムも含まれる場合があり、多くの場合、精度を高めるためにGNSSのような外部データと統合されます。
要約すると、AHRSは向き(姿勢と方位)に焦点を当てていますが、INSは位置、速度、向きを含むナビゲーションデータの完全なスイートを提供します。
IMUとINSの違いは何ですか?
慣性計測ユニット(IMU)と慣性航法システム(INS)の違いは、その機能と複雑さにあります。
IMU 慣性計測装置)は、加速度計やジャイロスコープによって測定された、車両の直線加速度および角速度に関する生データを提供します。IMUは、ロール、ピッチ、ヨー、および運動に関する情報を提供しますが、位置や航法データを計算することはありません。IMU 、位置や速度を決定するための外部処理に向けて、運動や姿勢に関する必須データを中継するように特別にIMU 。
一方、INS 慣性航法システム)は IMU のデータと高度なアルゴリズムを組み合わせて、時間の経過に伴う車両の位置、速度、および姿勢を算出します。これには、センサーフュージョンや統合のためのカルマンフィルタリングなどのナビゲーションアルゴリズムが組み込まれています。INS 、GNSSのような外部測位システムに依存することなく、位置、速度、姿勢を含むリアルタイムのナビゲーションデータINS 。
このナビゲーションシステムは、特に軍事用UAV、船舶、潜水艦など、GNSS環境において、包括的なナビゲーションソリューションを必要とする用途で一般的に利用されています。
INSは外部支援センサーからの入力を受け入れますか?
当社の慣性航法システムは、空気データセンサー、磁力計、走行距離計、DVL 外部補助センサーからの入力を受け付けます。
この統合により、特にGNSSが利用できない環境において、INSは非常に汎用性が高く信頼性の高いものになります。
これらの外部センサーは、補完的なデータを提供することにより、INSの全体的なパフォーマンスと精度を向上させます。
