Hyperloop Challenge
Zespół UCI wykorzystał miniaturowy INS Ellipse-N do pomiaru pozycji, prędkości i przyspieszenia swojej kapsuły.
„Byliśmy bardziej niż zadowoleni z wyników, jakie dał nam Ellipse-N. Było to najbardziej wiarygodne źródło danych, jakie uzyskaliśmy.” | Andrew T., kapitan zespołu HyperXite

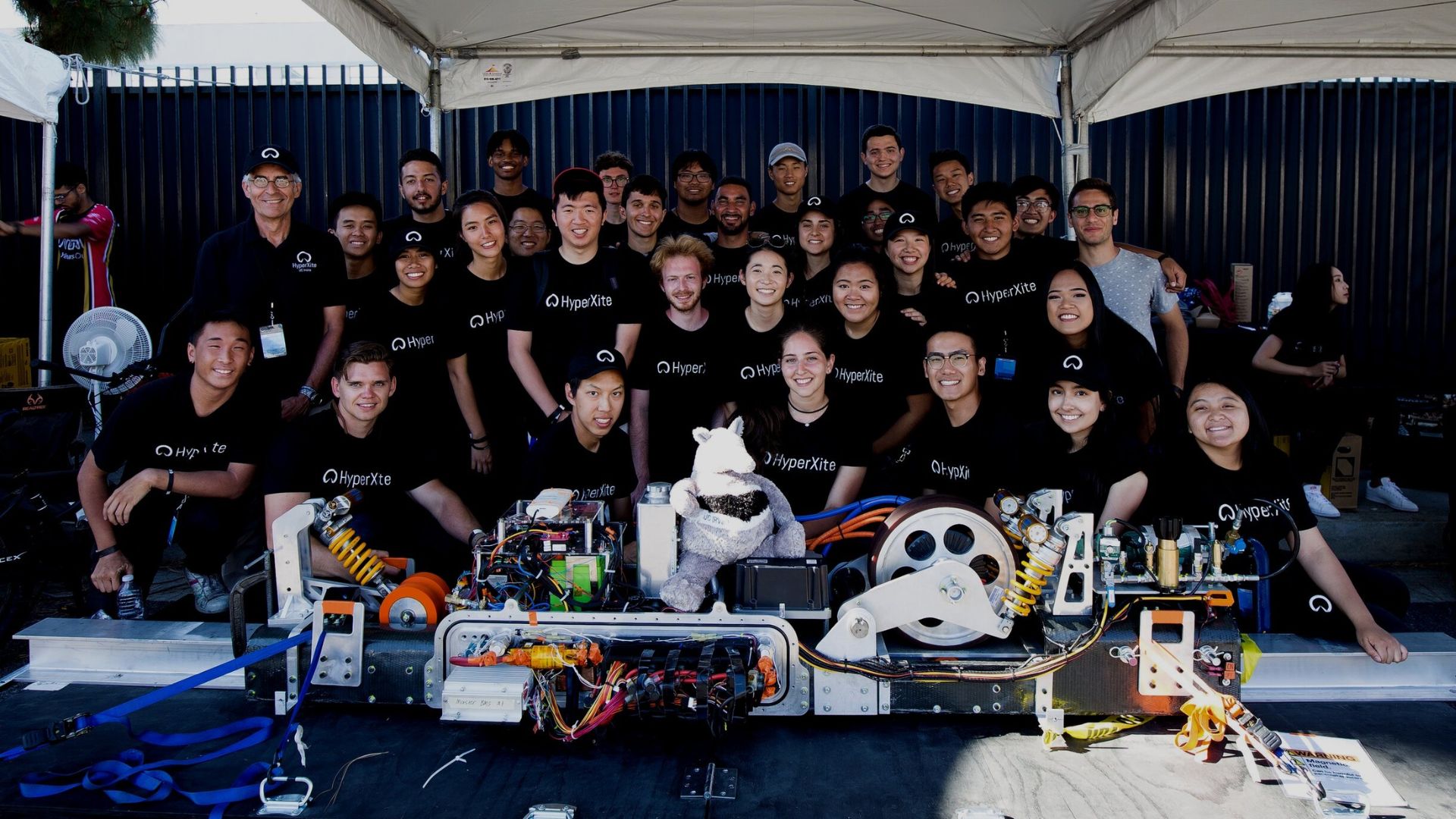
HyperXite, zespół z uniwersytetu UCI, wziął udział w drugim konkursie Hyperloop i zajął 1. miejsce wśród zespołów All-American Hyperloop oraz 2. miejsce na świecie w kategorii Air-Based Levitation. Wykorzystali miniaturowy system INS Ellipse-N do pomiaru pozycji, prędkości i przyspieszenia swojego pojazdu.
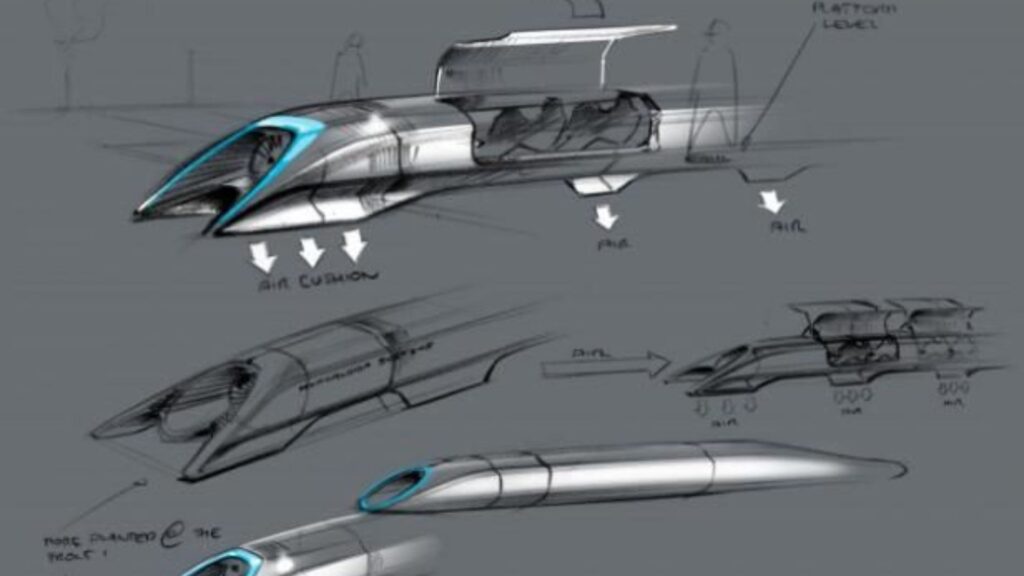
Koncepcja Hyperloop
Hyperloop to fascynująca koncepcja, której celem jest zwiększenie efektywności transportu. Hyperloop składa się z uszczelnionej rury, w której kapsuła może poruszać się bez oporu powietrza lub tarcia, przewożąc ludzi lub przedmioty z dużą prędkością przy zachowaniu wysokiej efektywności.
W 2015 roku SpaceX sponsorował pierwszy konkurs Hyperloop Pod Competition, w którym zespoły zbudowały prototyp w pomniejszonej skali, aby zademonstrować techniczną wykonalność różnych aspektów koncepcji Hyperloop. HyperXite, zespół z University of California, Irvine (UCI), wziął udział w drugim konkursie Hyperloop, wykorzystując Ellipse-N firmy SBG Systems.
Konkurencja II już się zakończyła, a HyperXite zajmuje 1. miejsce wśród wszystkich amerykańskich zespołów Hyperloop i 2. miejsce na świecie w kategorii lewitacji powietrznej. Ten odnoszący sukcesy zespół jest jednym z zaledwie sześciu zespołów na świecie, którym udało się przejechać całą drogę przez tubę Hyperloop na otwarte powietrze.
Zespół UCI « Hyperxite», na zawodach Hyperloop
Studenci UCI zaprojektowali rurowy pojazd do wydajnego poruszania się z dużą prędkością w prawie próżniowej rurze. Ponadto, pojazd wykorzystuje lekkie włókno węglowe i zaawansowane systemy do lewitacji, przewożenia pasażerów i bezpiecznego zatrzymywania się.
Zawody odbywają się na jednotorowym torze testowym w południowej Kalifornii. Dodatkowo, każdy pojazd przyspiesza, aby osiągnąć maksymalną prędkość, raportowaną w czasie rzeczywistym, a następnie zwalnia poprzez hamowanie.
Ostatecznie, sędziowie oceniają pojazdy pod względem prędkości, stabilności, hamowania i płynności.
Pozycja, prędkość i przyspieszenie zasobnika
"Nasz prototyp kapsuły potrzebował niezawodnego sposobu pomiaru położenia, prędkości i przyspieszenia, gdy kapsuła znajdowała się w próżniowej tubie Hyperloop firmy SpaceX" - wyjaśnia Andrew Tec, kapitan zespołu HyperXite.
O ile początkowo zespół miał koncepcję wdrożenia fuzji czujników z wieloma akcelerometrami i enkoderami obrotowymi w celu oszacowania zachowania kapsuły, Ellipse zapewnił wszystkie te funkcje z dokładnością klasy przemysłowej (0,1° roll/pitch) i w niewielkiej obudowie.
Czujnik inercyjny oferował dodatkowe cenne funkcje, takie jak pozycjonowanie GNSS i protokół magistrali CAN.

“Potrzebowaliśmy komponentu, który dobrze sprawdza się w warunkach bliskich próżni, który byłby łatwy do zintegrowania z precyzyjnymi czujnikami; Ellipse-N spełnił wszystkie kryteria.” | Andrew T., Kapitan zespołu HyperXite
Szybka i łatwa integracja Ellipse-N
Zespół prowadził prace rozwojowe, wykorzystując kontroler Compact RIO firmy National Instruments i uznał publiczną wtyczkę LabVIEW firmy SBG za bardzo wygodną; znacznie ułatwiła i przyspieszyła testowanie oraz rozwój.
“Jesteśmy więcej niż zadowoleni z rezultatów, jakie dał nam Ellipse-N. Było to najbardziej wiarygodne źródło danych, jakie uzyskaliśmy. Zachowanie automatycznego układu sterowania naszego modułu w dużym stopniu opierało się na jego szacowanym profilu trajektorii i czasie” podsumowuje kapitan zespołu.
SpaceX ogłosił trzeci konkurs, który odbędzie się w 2018 roku. Ponadto, HyperXite będzie konkurować z nowo przeprojektowanym modułem, aby spełnić zaktualizowane zasady Hyperloop Competition.

Ellipse-N
Ellipse to kompaktowy, wysokowydajny system nawigacji inercyjnej RTK ze zintegrowanym dwuzakresowym odbiornikiem GNSS o poczwórnej konstelacji. Co więcej, zapewnia on pozycjonowanie GNSS z roll, pitch, heading, heave i centymetrową dokładnością.
Czujnik Ellipse doskonale sprawdza się w dynamicznych środowiskach i trudnych warunkach GNSS . Ponadto działa skutecznie w aplikacjach o niższej dynamice, wykorzystując heading magnetyczny.

Zapytaj o wycenę dla Ellipse-N
Masz pytania?
Witamy w naszej sekcji FAQ! Znajdziesz tutaj odpowiedzi na najczęściej zadawane pytania dotyczące prezentowanych przez nas aplikacji. Jeśli nie znajdziesz tego, czego szukasz, skontaktuj się z nami bezpośrednio!
Co to jest GNSS a GPS?
GNSS oznacza Globalny System Nawigacji Satelitarnej, a GPS Globalny System Pozycjonowania. Terminy te są często używane zamiennie, ale odnoszą się do różnych koncepcji w ramach satelitarnych systemów nawigacyjnych.
GNSS to zbiorcze określenie wszystkich satelitarnych systemów nawigacyjnych, natomiast GPS odnosi się konkretnie do systemu amerykańskiego. Obejmuje wiele systemów, które zapewniają bardziej kompleksowy zasięg globalny, podczas gdy GPS jest tylko jednym z tych systemów.
Dzięki integracji danych z wielu systemów uzyskujesz lepszą dokładność i niezawodność dzięki GNSS, podczas gdy sam GPS może mieć ograniczenia w zależności od dostępności satelitów i warunków środowiskowych.
Jaka jest różnica między AHRS a INS?
Główna różnica między Attitude and Heading Reference System (AHRS) a Inertial Navigation System (INS) polega na ich funkcjonalności i zakresie dostarczanych danych.
AHRS dostarcza informacji o orientacji — w szczególności o położeniu (pitch, roll) i kierunku (yaw) pojazdu lub urządzenia. Zazwyczaj wykorzystuje kombinację czujników, w tym żyroskopy, akcelerometry i magnetometry, do obliczania i stabilizacji orientacji. AHRS podaje pozycję kątową w trzech osiach (pitch, roll i yaw), umożliwiając systemowi zrozumienie jego orientacji w przestrzeni. Jest często stosowany w lotnictwie, UAV, robotyce i systemach morskich w celu zapewnienia dokładnych danych o położeniu i kierunku, co ma kluczowe znaczenie dla kontroli i stabilizacji pojazdu.
INS nie tylko dostarcza dane o orientacji (jak AHRS), ale także śledzi pozycję, prędkość i przyspieszenie pojazdu w czasie. Wykorzystuje czujniki inercyjne do szacowania ruchu w przestrzeni 3D bez polegania na zewnętrznych odniesieniach, takich jak GNSS. Łączy czujniki znajdujące się w AHRS (żyroskopy, akcelerometry), ale może również zawierać bardziej zaawansowane algorytmy do śledzenia pozycji i prędkości, często integrując się z danymi zewnętrznymi, takimi jak GNSS, dla zwiększenia dokładności.
Podsumowując, AHRS koncentruje się na orientacji (pozycji i heading), podczas gdy INS dostarcza pełny zestaw danych nawigacyjnych, w tym pozycję, prędkość i orientację.
Jaka jest różnica między IMU a INS?
Różnica między inercyjnym zespołem pomiarowym (IMU) a inercyjnym systemem nawigacyjnym (INS) polega na ich funkcjonalności i złożoności.
IMU inercyjny moduł pomiarowy) dostarcza surowe dane dotyczące przyspieszenia liniowego i prędkości kątowej pojazdu, mierzone za pomocą akcelerometrów i żyroskopów. Dostarcza informacji o przechyłach, pochyleniach, odchyleniach i ruchu, ale nie oblicza danych dotyczących pozycji ani nawigacji. IMU specjalnie zaprojektowana przekazywania niezbędnych danych o ruchu i orientacji do zewnętrznego przetwarzania w celu określenia pozycji lub prędkości.
Z drugiej strony, INS inercyjny system nawigacyjny) łączy IMU z zaawansowanymi algorytmami w celu obliczenia pozycji, prędkości i orientacji pojazdu w czasie. Wykorzystuje algorytmy nawigacyjne, takie jak filtrowanie Kalmana, do fuzji i integracji danych z czujników. INS dane nawigacyjne w czasie rzeczywistym, w tym pozycję, prędkość i orientację, bez konieczności polegania na zewnętrznych systemach pozycjonowania, takich jak GNSS.
Ten system nawigacyjny jest zazwyczaj wykorzystywany w zastosowaniach wymagających kompleksowych rozwiązań nawigacyjnych, szczególnie w środowiskach GNSS, takich jak wojskowe bezzałogowe statki powietrzne (UAV), statki i okręty podwodne.
Czy INS akceptuje dane wejściowe z zewnętrznych czujników wspomagających?
Inercyjne systemy nawigacyjne z naszej firmy akceptują dane wejściowe z zewnętrznych czujników wspomagających, takich jak czujniki danych lotniczych, magnetometry, odometry, DVL i inne.
Ta integracja sprawia, że INS jest wysoce wszechstronny i niezawodny, szczególnie w środowiskach, gdzie sygnał GNSS jest niedostępny.
Te zewnętrzne czujniki poprawiają ogólną wydajność i dokładność INS, dostarczając uzupełniające się dane.
