Конкурс «Hyperloop»
Команда UCI використовувала мініатюрну систему INS Ellipse INS вимірювання положення, швидкості та прискорення свого модуля.
«Ми були більш ніж задоволені результатами, які нам надала Ellipse. Це було найнадійніше джерело даних, яке ми отримали». | Ендрю Т., капітан команди HyperXite

Команда HyperXite з університету UCI взяла участь у другому конкурсі Hyperloop і посіла перше місце серед американських команд Hyperloop та друге місце у світі в категорії «Повітряна левітація». INS вимірювання положення, швидкості та прискорення капсули вони використовували мініатюрну INS Ellipse.
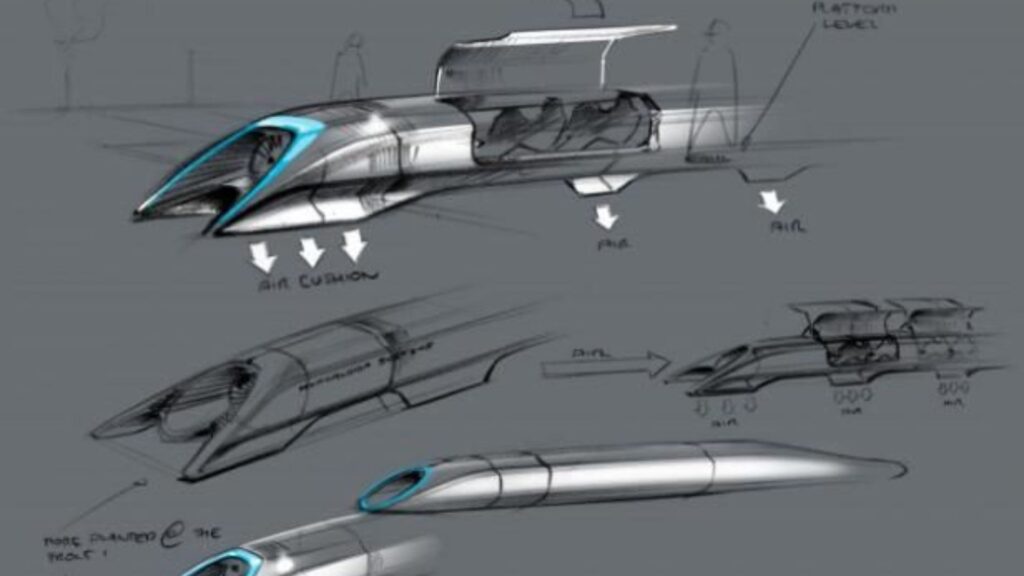
Концепція Hyperloop
Hyperloop — це дивовижна концепція, покликана підвищити ефективність транспорту. Система Hyperloop складається з герметичної труби, всередині якої капсула рухається без опору повітря та тертя, перевозячи людей або вантажі на високій швидкості з високою ефективністю.
У 2015 році компанія SpaceX виступила спонсором першого конкурсу Hyperloop Pod Competition, в рамках якого команди створювали зменшені прототипи для демонстрації технічної здійсненності різних аспектів концепції Hyperloop. HyperXite, команда з Каліфорнійського університету в Ірвіні (UCI), взяла участь у другому конкурсі Hyperloop з Ellipse від SBG Systems.
Змагання II завершилися, і команда HyperXite посіла 1-е місце серед американських команд Hyperloop та 2-е місце у світі в категорії «Повітряна левітація». Ця успішна команда є однією з шести команд у світі, яким вдалося пройти весь шлях через трубу Hyperloop і вийти на відкрите повітря.
Команда UCI «Hyperxite» на змаганнях Hyperloop
Студенти Каліфорнійського університету в Ірвіні (UCI) розробили трубчастий транспортний засіб, здатний ефективно рухатися на високій швидкості по трубі, що наближається до вакууму. Крім того, капсула використовує легке вуглецеве волокно та сучасні системи для левітації, перевезення пасажирів і безпечного гальмування.
Змагання проводяться на тестовій трасі довжиною в одну милю в Південній Каліфорнії. Крім того, кожна капсула розганяється до максимальної швидкості, яка відображається в режимі реального часу, а потім сповільнюється за допомогою гальм.
Нарешті, судді оцінюють капсули за швидкістю, стабільністю, гальмуванням та плавністю руху.
Координати, швидкість і прискорення капсули
«Нашому прототипу капсули був потрібен надійний спосіб вимірювання її положення, швидкості та прискорення під час перебування у вакуумній трубі Hyperloop компанії SpaceX», — пояснює Ендрю Тек, капітан команди HyperXite.
Якщо спочатку команда мала на меті реалізувати об'єднання даних з декількох акселерометрів та обертових енкодерів для оцінки поведінки капсули, то Ellipse забезпечив усі ці функції з промисловою точністю (0,1°pitch) у компактному корпусі.
Інерційний датчик мав додаткові корисні функції, такі як GNSS та протокол CAN-шини.

«Нам був потрібен компонент, який добре працює в умовах, близьких до вакууму, і який легко інтегрувати з високоточними датчиками; Ellipse відповідав усім цим критеріям». | Ендрю Т., капітан команди HyperXite
Швидка та проста інтеграція Ellipse
Команда розробляла систему з використанням контролера Compact RIO від National Instruments і визнала загальнодоступний плагін SBG для LabVIEW дуже зручним; він значно спростив і прискорив процес тестування та розробки.
«Ми були більш ніж задоволені результатами, які нам дав Ellipse. Це було найнадійніше джерело даних, яке ми отримали. Поведінка машини станів нашого капсули значною мірою залежала від її розрахункового профілю траєкторії та часу», — підсумовує капітан команди.
Компанія SpaceX оголосила про проведення третього конкурсу у 2018 році. Більше того, HyperXite братиме участь у змаганнях із новою, переробленою капсулою, щоб відповідати оновленим правилам конкурсу Hyperloop.

Ellipse-N
Ellipse — це компактна високопродуктивна інерційна навігаційна система RTK із вбудованим дводіапазонним GNSS . Крім того, вона забезпечує вимірювання roll, pitch heading та heave, а також GNSS із точністю до сантиметра.
Датчик Ellipse чудово працює в динамічних умовах та GNSS складних GNSS . Крім того, він ефективно функціонує в системах з меншими динамічними навантаженнями, використовуючи магнітний heading.

Запитайте ціну на Ellipse
У вас є питання?
Ласкаво просимо до розділу «Часті запитання»! Тут ви знайдете відповіді на найпоширеніші запитання щодо програм, які ми презентуємо. Якщо ви не знайдете потрібної інформації, звертайтеся до нас безпосередньо!
У чому різниця GNSS GPS?
GNSS «Глобальна навігаційна супутникова система», а GPS — «Глобальна система позиціонування». Ці терміни часто вживаються як синоніми, проте вони позначають різні поняття в рамках супутникових навігаційних систем.
GNSS загальний термін, що позначає всі супутникові навігаційні системи, тоді як GPS стосується саме американської системи. До GNSS входять численні системи, що забезпечують більш повне глобальне покриття, тоді як GPS є лише однією з цих систем.
Завдяки GNSS ви отримуєте вищу точність і надійність завдяки об’єднанню даних з декількох систем, тоді як використання лише GPS може мати певні обмеження, що залежать від наявності супутників та умов навколишнього середовища.
У чому полягає різниця між AHRS INS?
Основна відмінність між системою орієнтації та курсу (AHRS) та інерційною навігаційною системою (INS) полягає в їхній функціональності та обсязі даних, які вони надають.
AHRS інформацію про орієнтацію, а саме про положення (pitch, roll) та heading поворот) транспортного засобу або пристрою. Зазвичай вона використовує комбінацію датчиків, зокрема гіроскопів, акселерометрів та магнітометрів, для обчислення та стабілізації орієнтації. AHRS кутове положення по трьох осях (pitch, roll та відхилення), що дозволяє системі розуміти своє положення у просторі. Вона часто використовується в авіації, безпілотних літальних апаратах, робототехніці та морських системах для надання точних heading положення та heading , що є критично важливим для керування та стабілізації транспортного засобу.
Система INS тільки надає дані про орієнтацію (як і система AHRS), але й відстежує положення, швидкість та прискорення транспортного засобу в динаміці. Вона використовує інерційні датчики для оцінки руху в тривимірному просторі, не покладаючись на зовнішні джерела, такі як GNSS. Система поєднує датчики, що входять до складу AHRS гіроскопи, акселерометри), але також може містити більш досконалі алгоритми для відстеження положення та швидкості, часто інтегруючись із зовнішніми даними, такими як GNSS підвищення точності.
Отже, AHRS на орієнтації (кут нахилу та heading), тоді як INS повний набір навігаційних даних, включаючи координати, швидкість та орієнтацію.
У чому полягає різниця між IMU INS?
Різниця між інерційним вимірювальним блоком (IMU) та інерційною навігаційною системою (INS) полягає в їхній функціональності та складності.
IMU інерційний вимірювальний блок) надає необроблені дані про лінійне прискорення та кутову швидкість транспортного засобу, виміряні акселерометрами та гіроскопами. Він надає інформацію про roll, pitch, рискання та рух, але не обчислює дані про положення або навігацію. IMU спеціально IMU для передачі основних даних про рух та орієнтацію для зовнішньої обробки з метою визначення положення або швидкості.
З іншого боку, INS інерційна навігаційна система) поєднує IMU з передовими алгоритмами для обчислення положення, швидкості та орієнтації транспортного засобу в часі. Вона включає навігаційні алгоритми, такі як фільтрація Калмана, для злиття та інтеграції даних датчиків. INS навігаційні дані в режимі реального часу, включаючи положення, швидкість та орієнтацію, не покладаючись на зовнішні системи позиціонування, такі як GNSS.
Ця навігаційна система зазвичай використовується в додатках, що вимагають комплексних навігаційних рішень, особливо вdenied , таких як військові БПЛА, кораблі та підводні човни.
Чи INS сигнали від зовнішніх допоміжних датчиків?
Інерційні навігаційні системи нашої компанії приймають сигнали від зовнішніх допоміжних датчиків, таких як датчики аеродинамічних даних, магнітометри, одометри, цифрові лінійні датчики (DVL) та інші.
Така інтеграція робить INS універсальною та надійною системою, особливо вdenied .
Ці зовнішні датчики підвищують загальну ефективність та точність інерційної навігаційної системи ( INS надаючи додаткові дані.
