Des cimetières militaires américains numérisés pour une mission solennelle
« Nous avons choisi l'Ellipse-D en raison de sa solution GNSS et inertielle tout-en-un, intégrée dans un appareil compact et à faible consommation d'énergie. » | Matthew R. Staley, scientifique du soutien à l'ingénierie militaire et à la topographie au US Army Geospatial Center
L'Army Geospatial Center (AGC) a fait preuve d'innovation pour aider les visiteurs des cimetières militaires américains à retrouver leurs proches.
Les méthodes traditionnelles de levés GPS et la numérisation de la cartographie 3D ont été intégrées et montées sur un sac à dos spécialement conçu pour la partie collecte de ce projet.
Une interface Web qui sert d'interface frontale pour les données collectées fournit une interface simple aux visiteurs pour trouver leurs proches et accéder aux informations amplifiées stockées dans la base de données SIG.
Un projet pilote pour une mission solennelle
Trouver une pierre tombale particulière dans un cimetière national américain nécessite souvent des examens approfondis et chronophages des dossiers par les administrateurs.
Pour aider les visiteurs à retrouver facilement leurs proches, l'Army Geospatial Center (AGC), en collaboration avec le cimetière national d'Arlington (ANC), a réalisé un projet pilote comprenant les cimetières de Corozal (Panama) et de Normandie (France) qui, combinés, comptent plus de 15 000 sépultures.
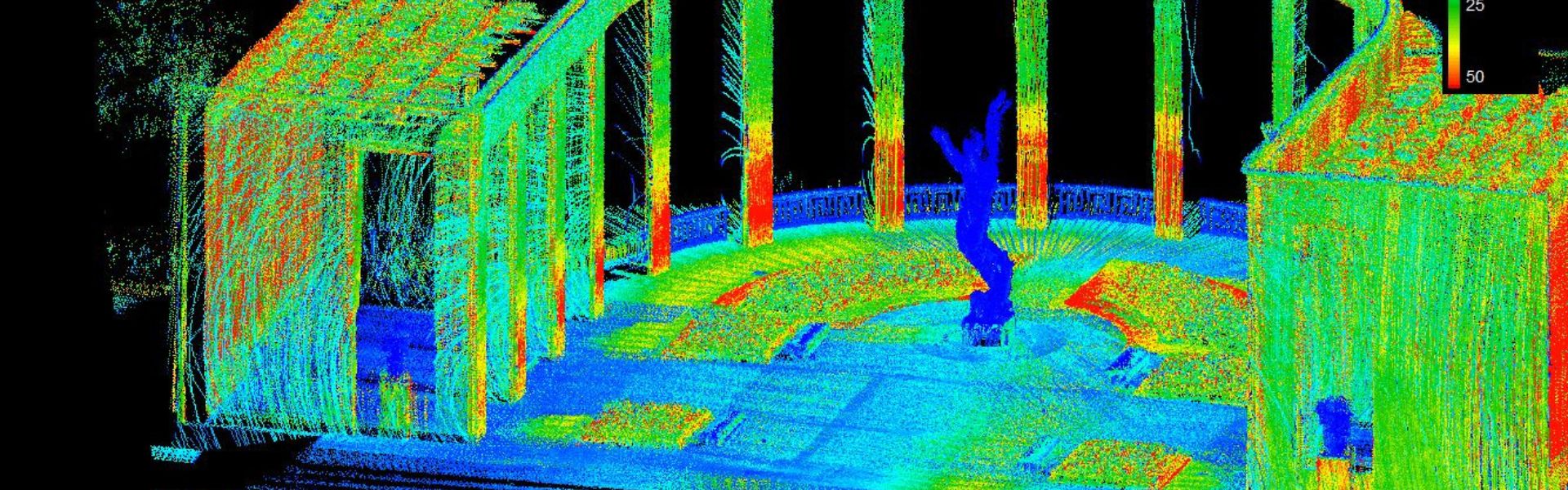
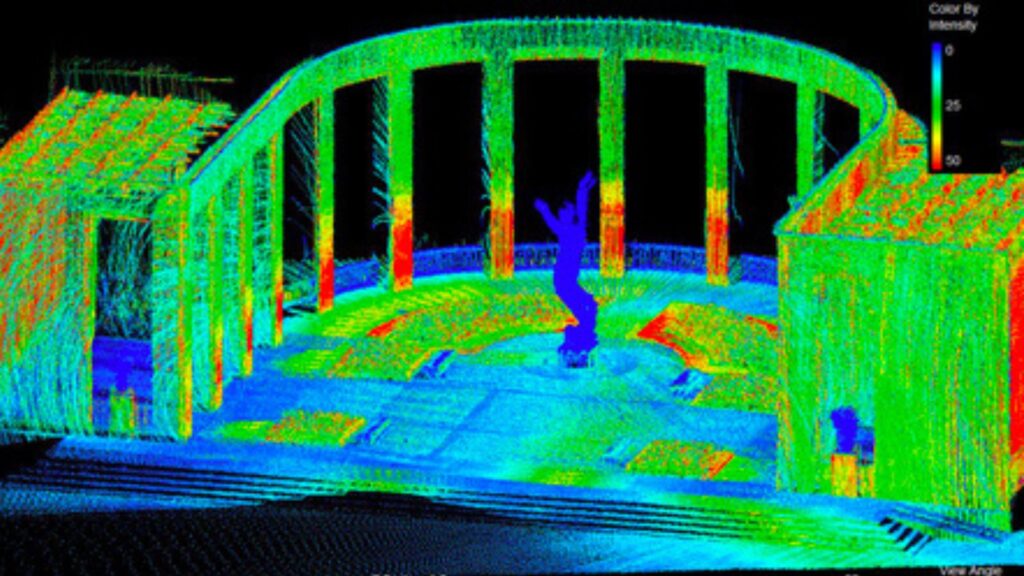
Ce projet massif combine des méthodes d'arpentage traditionnelles et des technologies modernes pour créer des modèles virtuels des deux cimetières.
Les modèles comprennent non seulement le terrain sous-jacent et les coordonnées GPS de chaque pierre tombale ou mémorial, mais aussi des éléments tels que les routes, les trottoirs, les arbres, les bordures, les caniveaux, les monuments et de nombreuses autres structures artificielles avec une précision estimée à 10 cm (3,9 pouces).
Des photographies géolocalisées du recto et du verso de chaque pierre tombale pour faciliter l'identification ont complété la solution de collecte.
Les données collectées ont été traitées et intégrées sur l'ordinateur portable ENFIRE. Grâce à ces innovations, les visiteurs peuvent accéder aux données du cimetière, rechercher des proches ou trouver des sépultures d'importance historique en utilisant les bornes situées dans les installations qui exécutent le programme ANC Explorer.
Les visiteurs virtuels disposent de fonctionnalités identiques en utilisant le programme sur leur ordinateur personnel ou leur appareil mobile.
Méthode de cartographie mobile avec sac à dos
Afin de cartographier les cimetières dans leur intégralité avec un maximum de détails, Matthew R. Staley, scientifique du soutien à l'ingénierie militaire et aux levés au US Army Geospatial Center, a développé une solution de cartographie mobile basée sur un sac à dos.
L'utilisation de l'équipement minimise les coûts en réduisant les temps de collecte et en fournissant des données dans des formats faciles à gérer. Il exploite les outils utilisés par les services de levés militaires américains appelés ENFIRE et GPS-S.
« J'ai couplé un LiDAR de Velodyne avec le Ellipse-D Système de Navigation Inertielle (INS) avec GPS RTK intégré de SBG Systems » explique Matthew R. Staley.
Il a choisi l'Ellipse-D en raison de sa solution GNSS et inertielle tout-en-un, conditionnée dans un appareil compact et à faible consommation d'énergie.
L'INS/GNSS fournit une compensation de mouvement et un géoréférencement du nuage de points. De plus, une station de base Real Time Kinematic (RTK) a été installée dans le cimetière pour une précision maximale. En outre, le logiciel Hypack a géré efficacement le nuage de points généré.
Ajustement de la déclinaison magnétique
L'un des défis était l'étalonnage du magnétomètre, qui est affecté par la teneur en fer du site. La déclinaison magnétique varie en fonction de l'emplacement ; ainsi, l'expédition du sac à dos des États-Unis vers la France a modifié la déclinaison magnétique.
L'Agence américaine d'océanographie et d'atmosphère (NOAA) met à jour une carte mondiale du champ magnétique terrestre tous les 5 ans.
Cette carte peut être utilisée, pour un emplacement et une date donnés, afin de déterminer la déclinaison magnétique à cet endroit précis.
SBG Systems intègre cette carte dans ses systèmes de navigation inertielle, permettant un cap automatique vers le Nord Vrai lors de l'utilisation de magnétomètres.
Relevés autour des arbres
Un autre défi consistait à effectuer des levés à proximité de certains types d'arbres qui affectent considérablement la réception des satellites. M. Staley a modifié la procédure de collecte de données pour compenser ce problème et poursuit ses recherches sur les moyens qui permettraient d'atténuer davantage l'effet de la végétation sur la réception.
De plus, la réduction de la portée du LiDAR pour obtenir une meilleure précision (+/- 5 cm au total) sera étudiée comme un moyen d'atténuer les artefacts de lacet.
« Je testerai bientôt le logiciel de post-traitement Qinertia de SBG, cela pourrait aider à maintenir une précision robuste dans toutes les conditions » ajoute l'ingénieur militaire américain.
Un logiciel Post Processing Kinematic (PPK) tel que Qinertia permet d'accéder aux corrections RTK hors ligne et améliore les performances des systèmes de navigation inertielle en post-traitant les données inertielles avec les observables GNSS brutes à l'aide d'un calcul appelé Forward-Backward-Merge.
Récemment lancé, le logiciel Qinertia a été conçu pour être intuitif et facile à utiliser et a été indépendamment qualifié comme le logiciel de post-traitement le plus rapide du marché.
Quelles sont les prochaines étapes ?
La mission principale était de collecter des données relatives aux inhumations et de confirmer l'applicabilité des ensembles d'outils ENFIRE, GPS-S et LiDAR à l'exploitation et à la gestion du cimetière national d'Arlington.
Ils ont pu auditer les terrains, mettre à jour les registres et évaluer les constructions à l'aide des données LiDAR collectées.
De plus, ils ont élaboré des plans stratégiques qui ont amélioré l'efficacité de leurs processus métier.
Maintenant que la phase pilote est terminée, le Centre Géospatial de l'Armée collabore étroitement avec le cimetière national d'Arlington et l'American Battle Monuments Commission pour évaluer les résultats et déterminer une stratégie pour les améliorations et innovations futures.
Les premiers résultats ont prouvé que les coûts ont été minimisés par rapport aux efforts précédents. De plus, plusieurs communautés ont réalisé un excellent retour sur investissement global.


Ellipse-D
L'Ellipse-D est un système de navigation inertielle intégrant un GNSS RTK bi-fréquence à double antenne compatible avec notre logiciel de post-traitement Qinertia.
Conçu pour les applications robotiques et géospatiales, il peut fusionner l'entrée odomètre avec Pulse ou CAN OBDII pour une précision accrue de la navigation à l'estime.

Demander un devis pour l'Ellipse-D
Vous avez des questions ?
Bienvenue dans notre section FAQ ! Vous trouverez ici les réponses aux questions les plus fréquemment posées sur les applications que nous présentons. Si vous ne trouvez pas ce que vous cherchez, n'hésitez pas à nous contacter directement !
L'INS accepte-t-il les entrées de capteurs d'aide externes ?
Les systèmes de navigation inertielle de notre société acceptent les entrées de capteurs d'aide externes, tels que les capteurs de données aériennes, les magnétomètres, les odomètres, le DVL et autres.
Cette intégration rend l'INS très polyvalent et fiable, en particulier dans les environnements où le GNSS est inaccessible.
Ces capteurs externes améliorent les performances globales et la précision de l'INS en fournissant des données complémentaires.
Quelle est la différence entre AHRS et INS ?
La principale différence entre un Attitude and Heading Reference System (AHRS) et un Inertial Navigation System (INS) réside dans leur fonctionnalité et l'étendue des données qu'ils fournissent.
Un AHRS fournit des informations d'orientation, en particulier l'attitude (tangage, roulis) et le cap (lacet) d'un véhicule ou d'un appareil. Il utilise généralement une combinaison de capteurs, notamment des gyroscopes, des accéléromètres et des magnétomètres, pour calculer et stabiliser l'orientation. L'AHRS fournit la position angulaire sur trois axes (tangage, roulis et lacet), ce qui permet à un système de comprendre son orientation dans l'espace. Il est souvent utilisé dans l'aviation, les UAV, la robotique et les systèmes marins pour fournir des données d'attitude et de cap précises, ce qui est essentiel pour le contrôle et la stabilisation du véhicule.
Un INS fournit non seulement des données d'orientation (comme un AHRS), mais suit également la position, la vitesse et l'accélération d'un véhicule dans le temps. Il utilise des capteurs inertiels pour estimer le mouvement dans l'espace 3D sans dépendre de références externes comme le GNSS. Il combine les capteurs présents dans les AHRS (gyroscopes, accéléromètres) mais peut également inclure des algorithmes plus avancés pour le suivi de la position et de la vitesse, souvent en s'intégrant à des données externes comme le GNSS pour une précision accrue.
En résumé, l'AHRS se concentre sur l'orientation (attitude et cap), tandis que l'INS fournit une suite complète de données de navigation, y compris la position, la vitesse et l'orientation.
Quelle est la différence entre une IMU et un INS ?
La différence entre une unité de mesure inertielle (IMU) et un système de navigation inertielle (INS) réside dans leur fonctionnalité et leur complexité.
Une IMU unité de mesure inertielle) fournit des données brutes sur l’accélération linéaire et la vitesse angulaire du véhicule, mesurées par des accéléromètres et des gyroscopes. Elle fournit des informations sur le roulis, le tangage, le lacet et le mouvement, mais ne calcule pas les données de position ou de navigation. IMU spécifiquement conçue pour transmettre des données essentielles sur le mouvement et l’orientation en vue d’un traitement externe permettant de déterminer la position ou la vitesse.
D’autre part, un INS système de navigation inertielle) combine IMU avec des algorithmes avancés pour calculer la position, la vitesse et l'orientation d'un véhicule au fil du temps. Il intègre des algorithmes de navigation tels que le filtrage de Kalman pour la fusion et l'intégration des capteurs. Un INS des données de navigation en temps réel, notamment la position, la vitesse et l'orientation, sans dépendre de systèmes de positionnement externes tels que GNSS.
Ce système de navigation est généralement utilisé dans des applications nécessitant des solutions de navigation complètes, en particulier dans des environnements GNSS, comme les drones militaires, les navires et les sous-marins.
Quelle est la différence entre GNSS et GPS ?
Le GNSS signifie Système Mondial de Navigation par Satellite et le GPS signifie Système de Positionnement Global. Ces termes sont souvent employés indifféremment, mais ils désignent des concepts distincts au sein des systèmes de navigation par satellite.
Le GNSS est un terme générique désignant l'ensemble des systèmes de navigation par satellite, tandis que le GPS fait spécifiquement référence au système américain. Il inclut plusieurs systèmes qui offrent une couverture mondiale plus complète, alors que le GPS n'est qu'un de ces systèmes.
Vous bénéficiez d'une précision et d'une fiabilité accrues avec GNSS, en intégrant les données de plusieurs systèmes, alors que GPS seul peut avoir des limitations en fonction de la disponibilité des satellites et des conditions environnementales.
