Amerikanische Militärfriedhöfe für eine würdevolle Aufgabe digitalisiert
“Wir haben uns für die Ellipse-D entschieden, weil sie eine All-in-One- GNSS- und Trägheitslösung ist, die in einem kompakten und stromsparenden Gerät untergebracht ist.” | Matthew R. Staley, Military Engineering & Survey Support Scientist am US Army Geospatial Center
Das Army Geospatial Center (AGC) hat Innovationen eingesetzt, um Besuchern amerikanischer Militärfriedhöfe zu helfen, ihre Angehörigen zu finden.
Traditionelle GPS-Vermessungsmethoden und 3D-Kartierungsdigitalisierung wurden integriert und auf einem speziell für die Datenerfassung dieses Projekts gebauten Rucksack montiert.
Eine Webschnittstelle, die als Frontend für die gesammelten Daten dient, bietet Besuchern eine unkomplizierte Möglichkeit, ihre Verwandten zu finden und auf erweiterte Informationen zuzugreifen, die in der GIS-Datenbank gespeichert sind.
Ein Pilotprojekt für eine würdevolle Aufgabe
Das Auffinden eines bestimmten Grabsteins auf einem amerikanischen Nationalfriedhof erfordert oft umfangreiche und zeitaufwändige Recherchen in den Unterlagen durch die Verwaltung.
Um Besuchern das Auffinden ihrer Angehörigen zu erleichtern, hat das Army Geospatial Center (AGC) in Zusammenarbeit mit dem Arlington National Cemetery (ANC) ein Pilotprojekt abgeschlossen, das die Friedhöfe Corozal (Panama) und Normandie (Frankreich) umfasst, die zusammen mehr als 15.000 Grabstätten umfassen.
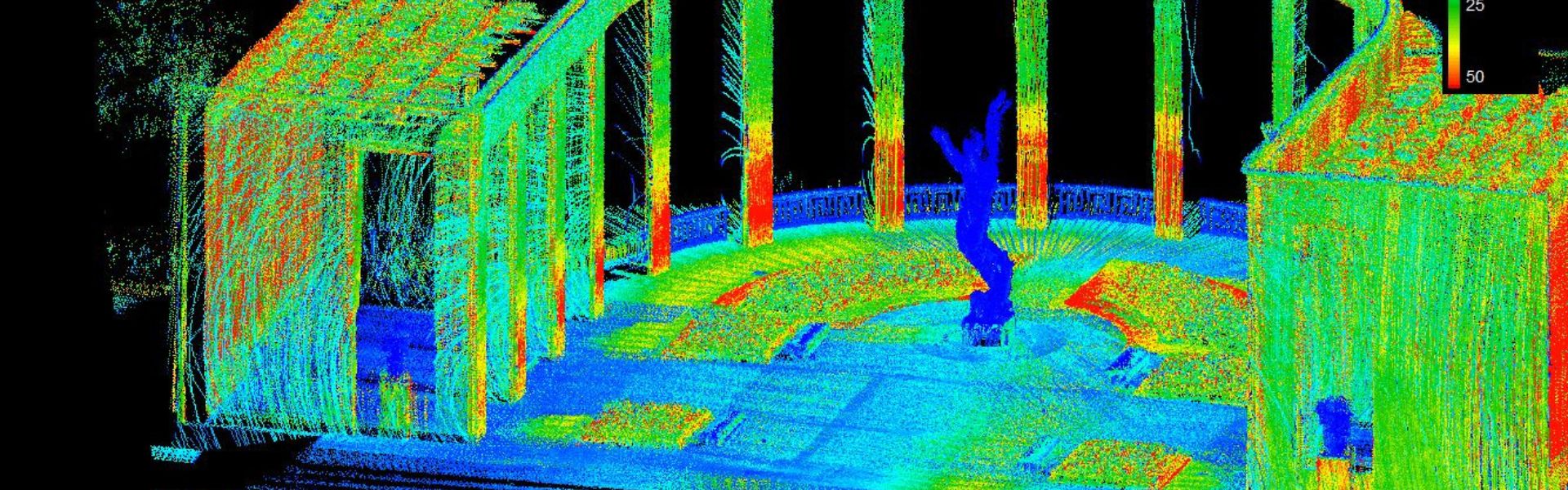
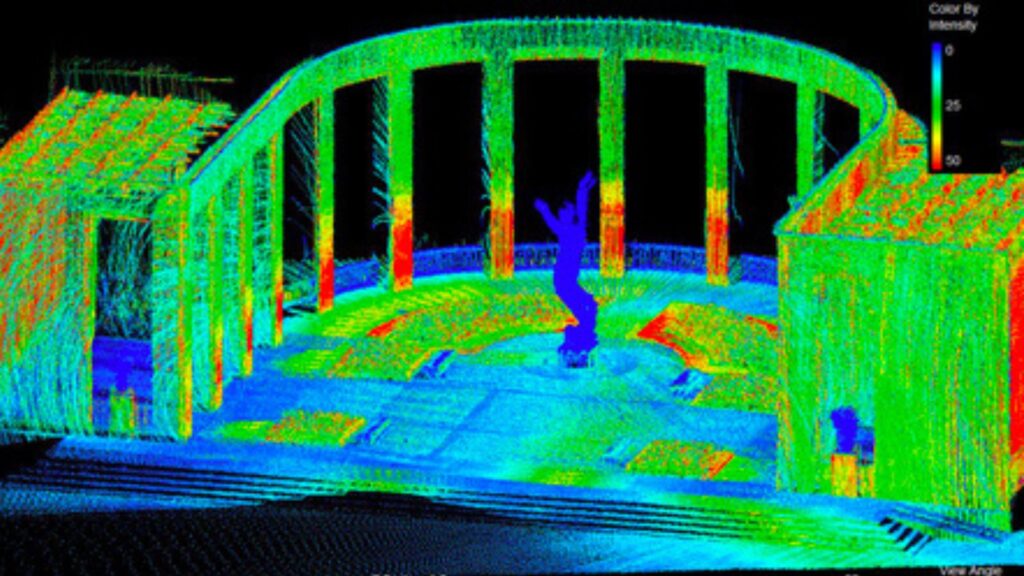
Dieses umfangreiche Projekt kombiniert traditionelle Vermessungsmethoden und moderne Technologien, um virtuelle Modelle beider Friedhöfe zu erstellen.
Die Modelle umfassen nicht nur das zugrunde liegende Gelände und die GPS-Koordinaten für jeden Grabstein oder jedes Denkmal, sondern auch Merkmale wie Straßen, Gehwege, Bäume, Bordsteine, Rinnen, Denkmäler und viele andere von Menschenhand geschaffene Strukturen mit einer geschätzten Genauigkeit von 10 cm (3,9 Zoll).
Geolokalisierte Fotos der Vorder- und Rückseite jedes Grabsteins zur Unterstützung der Identifizierung vervollständigten die Datenerfassungslösung.
Die gesammelten Daten wurden verarbeitet und auf dem ENFIRE-Laptop integriert. Dank dieser Innovationen können Besucher über die Kioske in den Einrichtungen, die das ANC Explorer-Programm betreiben, auf Friedhofsdaten zugreifen, nach Angehörigen suchen oder historisch bedeutsame Grabstätten finden.
Virtuelle Besucher haben die gleiche Funktionalität, wenn sie das Programm auf ihrem Heimcomputer oder Mobilgerät nutzen.
Rucksackbasiertes Mobile Mapping Verfahren
Um die Friedhöfe vollständig und mit maximalen Details zu kartieren, entwickelte Matthew R. Staley, Military Engineering and Survey Support Scientist am US Army Geospatial Center, eine rucksackbasierte mobile Kartierungslösung.
Der Einsatz der Ausrüstung minimiert die Kosten, indem er die Erfassungszeiten verkürzt und Daten in Formaten bereitstellt, die einfach zu verwalten sind. Sie nutzt Werkzeuge, die von den U.S. Military Survey Services verwendet werden, ENFIRE und GPS-S.
“Ich habe ein LiDAR von Velodyne mit dem Ellipse-D Inertial Navigation System (INS) mit eingebettetem RTK-GPS von SBG Systems gekoppelt”, erklärt Matthew R. Staley.
Er wählte die Ellipse-D aufgrund ihrer All-in-One GNSS- und Inertiallösung, verpackt in einem kompakten und stromsparenden Gerät.
Das INS/GNSS bietet Bewegungskompensation und Punktwolken-Georeferenzierung. Darüber hinaus wurde eine Real Time Kinematic (RTK)-Basisstation auf dem Friedhof installiert, um maximale Genauigkeit zu erzielen. Zusätzlich verwaltete die Hypack-Software die generierte Punktwolke effizient.
Anpassen der magnetischen Deklination
Eine der Herausforderungen war die Magnetometerkalibrierung, die durch den Eisengehalt des Standorts beeinflusst wird. Die Änderung der magnetischen Deklination hängt vom Standort ab; der Versand des Rucksacks von den USA nach Frankreich änderte daher die magnetische Deklination.
Die amerikanische National Oceanographic and Atmospheric Agency (NOAA) aktualisiert alle 5 Jahre eine globale Karte des Erdmagnetfeldes.
Diese Karte kann verwendet werden, um, unter Berücksichtigung eines bestimmten Standorts und Datums, die magnetische Deklination an diesem spezifischen Ort zu bestimmen.
SBG Systems bettet diese Karte in ihre Inertialnavigationssysteme ein, was eine automatische Ausrichtung auf den wahren Norden bei Verwendung von Magnetometern ermöglicht.
Vermessung in Baumgebieten
Eine weitere Herausforderung war die Vermessung in der Nähe bestimmter Baumarten, die den Satellitenempfang stark beeinträchtigen. Herr Staley modifizierte das Datenerfassungsverfahren, um dieses Problem zu kompensieren, und forscht weiterhin nach Möglichkeiten, die die Auswirkungen der Vegetation auf den Empfang weiter abschwächen werden.
Zusätzlich wird die Reduzierung der LiDAR-Reichweite untersucht, um eine bessere Genauigkeit (+/- 5 cm insgesamt) zu erzielen und Yaw-Artefakte zu reduzieren.
“Ich werde die Qinertia Post-Processing Software von SBG bald testen, sie könnte helfen, eine robuste Genauigkeit unter allen Bedingungen zu gewährleisten”, fügt der U.S. Military Engineer hinzu.
Post Processing Kinematic (PPK) Software wie Qinertia ermöglicht den Zugriff auf Offline-RTK-Korrekturen und verbessert die Leistung von Inertial Navigation Systems durch die Nachbearbeitung von Inertialdaten mit rohen GNSS-Beobachtungsdaten unter Verwendung einer Berechnung namens Forward-Backward-Merge.
Die kürzlich veröffentlichte Qinertia Software wurde als intuitiv und einfach zu bedienen konzipiert und wurde unabhängig als die schnellste Post-Processing Software auf dem Markt charakterisiert.
Wie geht es weiter?
Die Hauptaufgabe bestand darin, Daten bezüglich Bestattungen zu erfassen und die Anwendbarkeit der ENFIRE-, GPS-S- und LiDAR-Toolsets für den Betrieb und die Verwaltung des Arlington National Cemetery zu bestätigen.
Sie erkannten die Möglichkeit, Gelände zu prüfen, Aufzeichnungen zu aktualisieren und Bauarbeiten mithilfe der gesammelten LiDAR-Daten zu bewerten.
Darüber hinaus entwickelten sie strategische Pläne, die die Effizienz ihrer Geschäftsprozesse verbesserten.
Nachdem die Pilotphase abgeschlossen ist, arbeitet das Army Geospatial Center eng mit dem Arlington National Cemetery und der American Battle Monuments Commission zusammen, um die Ergebnisse zu bewerten und eine Strategie für zukünftige Verbesserungen und Innovationen festzulegen.
Erste Ergebnisse zeigten, dass die Kosten im Vergleich zu früheren Bemühungen minimiert wurden. Darüber hinaus erzielten mehrere Gemeinschaften einen ausgezeichneten Return on Investment.


Ellipse-D
Die Ellipse-D ist ein inertiales Navigationssystem, das eine Dual-Antenne und ein Dual-Frequenz RTK GNSS integriert und mit unserer Post-Processing-Software Qinertia kompatibel ist.
Entwickelt für Roboter- und Geodatenanwendungen, kann es den Odometer-Eingang mit Pulse oder CAN OBDII für eine verbesserte Koppelnavigation-Genauigkeit verschmelzen.

Fordern Sie ein Angebot für Ellipse-D an
Haben Sie Fragen?
Willkommen in unserem FAQ-Bereich! Hier finden Sie Antworten auf die häufigsten Fragen zu den Anwendungen, die wir vorstellen. Wenn Sie nicht finden, wonach Sie suchen, können Sie sich gerne direkt an uns wenden!
Akzeptiert das INS Eingaben von externen Hilfssensoren?
Inertiale Navigationssysteme unseres Unternehmens akzeptieren Eingaben von externen Hilfssensoren wie Luftdatensensoren, Magnetometern, Odometern, DVL und anderen.
Diese Integration macht das INS äußerst vielseitig und zuverlässig, insbesondere in GNSS-abgelehnten Umgebungen.
Diese externen Sensoren verbessern die Gesamtleistung und Genauigkeit des INS, indem sie ergänzende Daten liefern.
Was ist der Unterschied zwischen AHRS und INS?
Der Hauptunterschied zwischen einem Attitude and Heading Reference System (AHRS) und einem Inertial Navigation System (INS) liegt in ihrer Funktionalität und dem Umfang der von ihnen bereitgestellten Daten.
AHRS liefert Orientierungsinformationen, insbesondere die Lage (Nick-, Rollwinkel) und den Kurs (Gierwinkel) eines Fahrzeugs oder Geräts. Es verwendet typischerweise eine Kombination von Sensoren, darunter Gyroskope, Beschleunigungsmesser und Magnetometer, um die Orientierung zu berechnen und zu stabilisieren. Das AHRS gibt die Winkelposition in drei Achsen (Nick-, Roll- und Gierwinkel) aus, wodurch ein System seine Orientierung im Raum verstehen kann. Es wird häufig in der Luftfahrt, bei UAVs, in der Robotik und in Marinesystemen eingesetzt, um genaue Lage- und Kursdaten zu liefern, die für die Fahrzeugsteuerung und -stabilisierung entscheidend sind.
Ein INS liefert nicht nur Orientierungsdaten (wie ein AHRS), sondern verfolgt auch die Position, Geschwindigkeit und Beschleunigung eines Fahrzeugs im Zeitverlauf. Es verwendet Trägheitssensoren, um die Bewegung im 3D-Raum zu schätzen, ohne auf externe Referenzen wie GNSS angewiesen zu sein. Es kombiniert die in AHRS (Gyroskope, Beschleunigungsmesser) enthaltenen Sensoren, kann aber auch fortschrittlichere Algorithmen für die Positions- und Geschwindigkeitsverfolgung enthalten und sich oft mit externen Daten wie GNSS integrieren, um die Genauigkeit zu verbessern.
Zusammenfassend lässt sich sagen, dass sich AHRS auf die Orientierung (Lage und Kurs) konzentriert, während INS eine vollständige Suite von Navigationsdaten einschließlich Position, Geschwindigkeit und Orientierung bereitstellt.
Was ist der Unterschied zwischen IMU und INS?
Der Unterschied zwischen einer Trägheitsmesseinheit (IMU) und einem Trägheitsnavigationssystem (INS) liegt in ihrer Funktionalität und Komplexität.
Eine IMU Inertial Measurement Unit) liefert Rohdaten zur linearen Beschleunigung und Winkelgeschwindigkeit des Fahrzeugs, die von Beschleunigungssensoren und Gyroskopen gemessen werden. Sie liefert Informationen zu Roll-, Nick- und Gierbewegung sowie zur Gesamtbewegung, berechnet jedoch keine Positions- oder Navigationsdaten. Die IMU speziell darauf ausgelegt, wesentliche Daten zu Bewegung und Ausrichtung zur externen Verarbeitung weiterzuleiten, um Position oder Geschwindigkeit zu bestimmen.
Ein INS Inertial Navigation System) hingegen kombiniert IMU -Daten mit fortschrittlichen Algorithmen, um die Position, Geschwindigkeit und Ausrichtung eines Fahrzeugs im Zeitverlauf zu berechnen. Es nutzt Navigationsalgorithmen wie Kalman-Filterung für die Sensorfusion und -integration. Ein INS Echtzeit-Navigationsdaten, einschließlich Position, Geschwindigkeit und Ausrichtung, ohne auf externe Ortungssysteme wie GNSS angewiesen zu sein.
Dieses Navigationssystem wird typischerweise in Anwendungen eingesetzt, die umfassende Navigationslösungen erfordern, insbesondere in Umgebungen GNSS, wie z. B. bei militärischen UAVs, Schiffen und U-Booten.
Was ist GNSS vs. GPS?
GNSS steht für Global Navigation Satellite System und GPS für Global Positioning System. Diese Begriffe werden oft synonym verwendet, aber sie beziehen sich auf unterschiedliche Konzepte innerhalb satellitengestützter Navigationssysteme.
GNSS ist ein Sammelbegriff für alle Satellitennavigationssysteme, während GPS sich speziell auf das US-amerikanische System bezieht. GNSS umfasst mehrere Systeme, die eine umfassendere globale Abdeckung bieten, wobei GPS nur eines dieser Systeme ist.
Durch die Integration von Daten aus mehreren Systemen erhalten Sie mit GNSS eine verbesserte Genauigkeit und Zuverlässigkeit, während GPS allein je nach Satellitenverfügbarkeit und Umgebungsbedingungen Einschränkungen aufweisen kann.
